汽车工程 ›› 2025, Vol. 47 ›› Issue (5): 851-858.doi: 10.19562/j.chinasae.qcgc.2025.05.006
熊璐1,朱佳琪1,陈梦源1,李子尧1,舒强2,卓桂荣1( )
)
Lu Xiong1,Jiaqi Zhu1,Mengyuan Chen1,Ziyao Li1,Qiang Shu2,Guirong Zhuo1()
摘要:
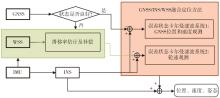
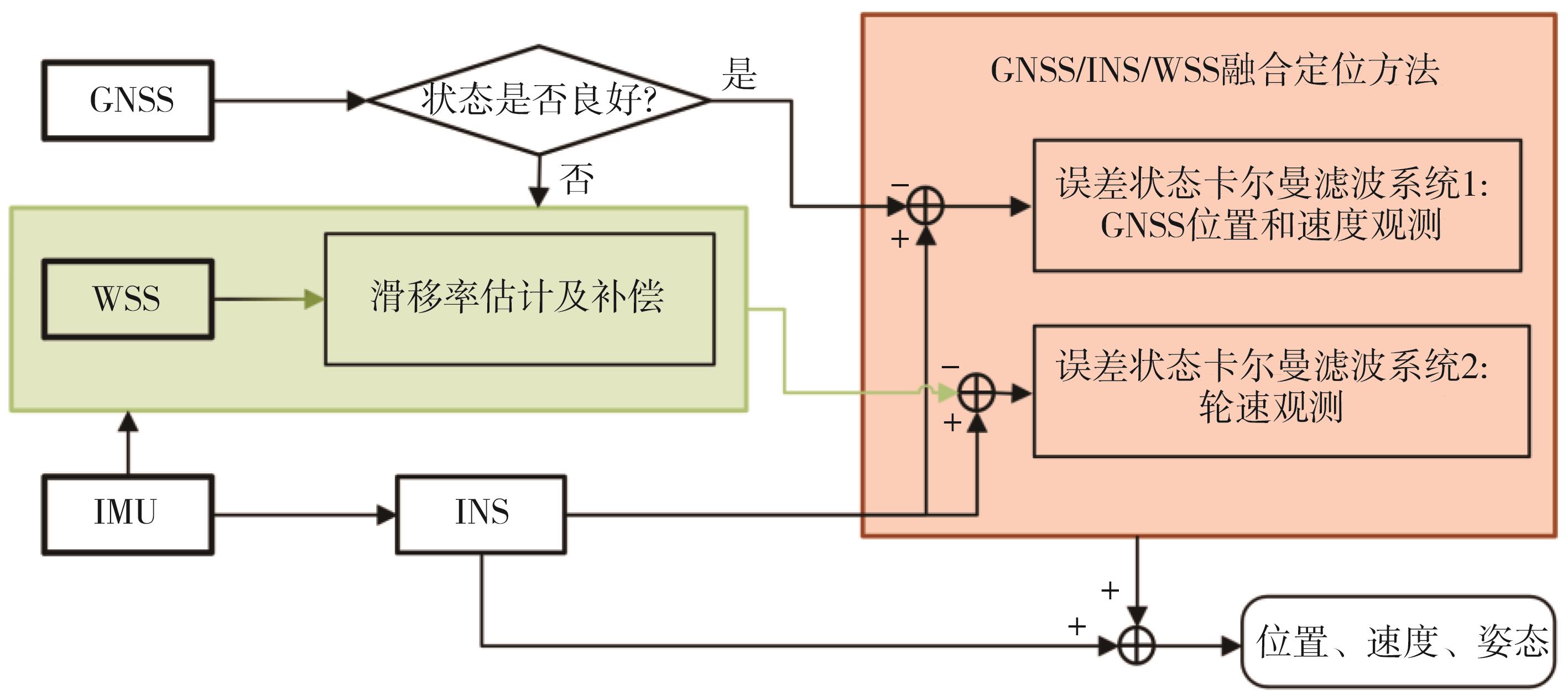
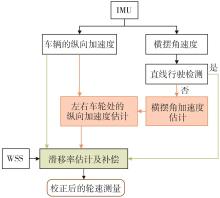
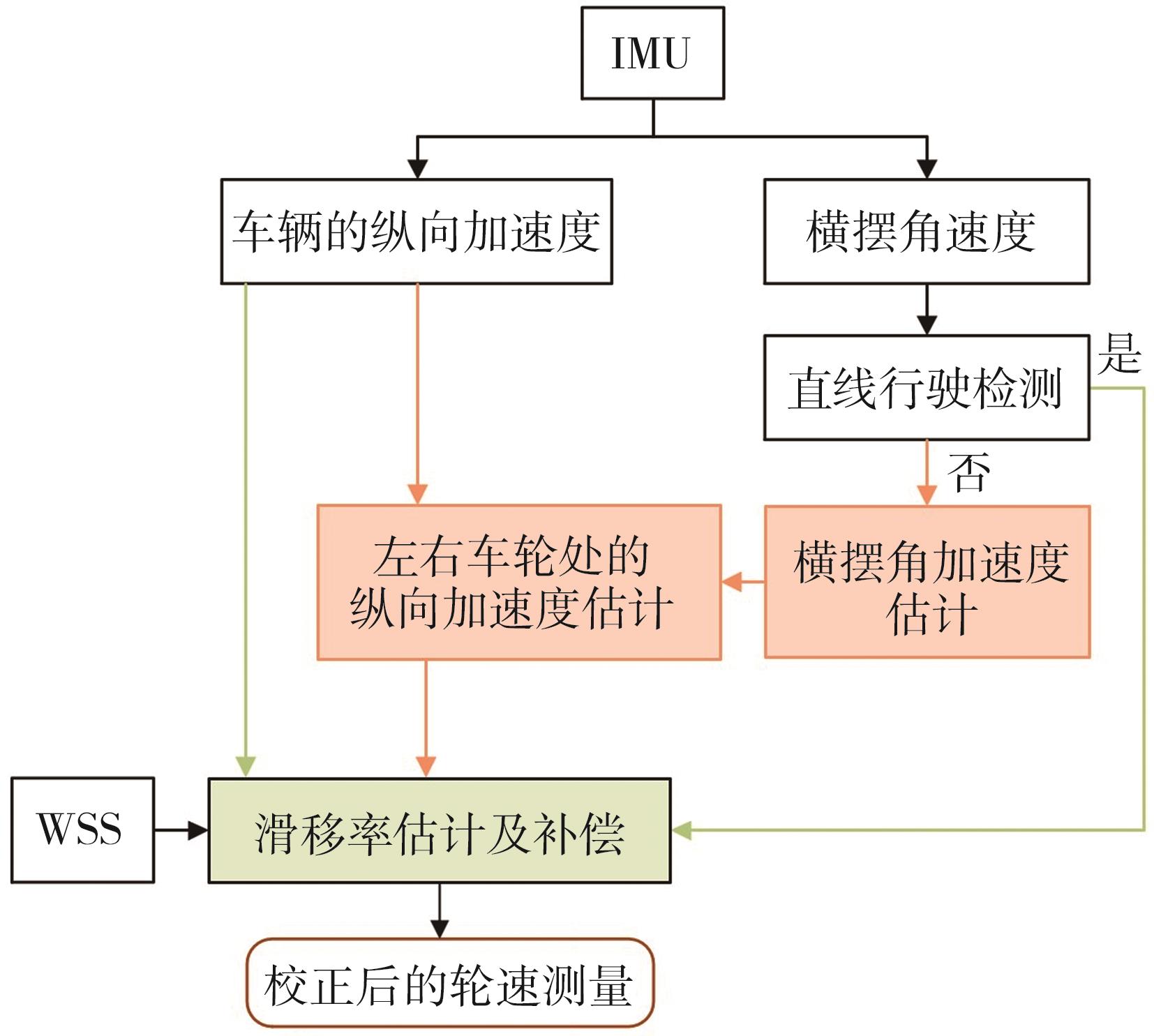
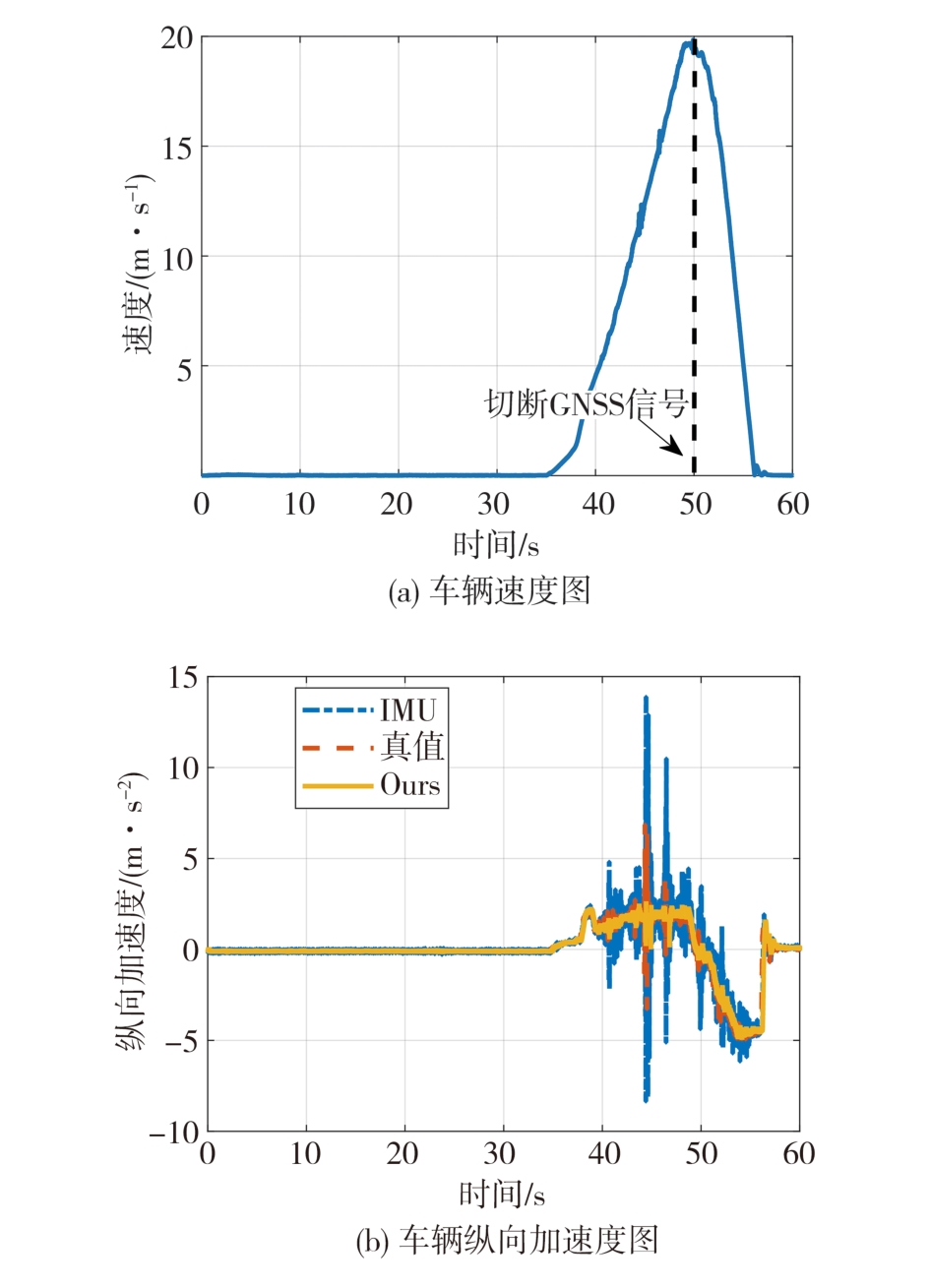
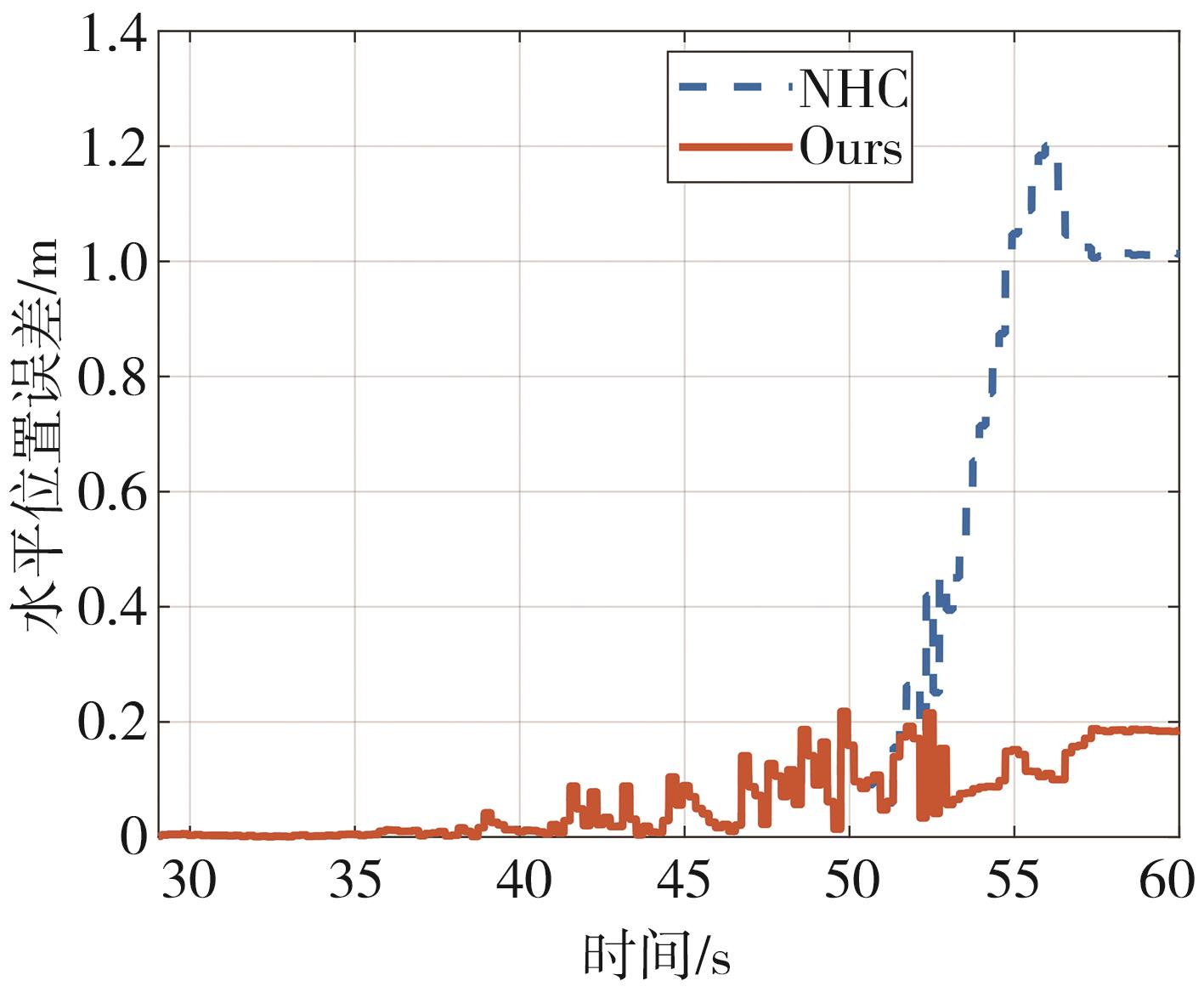
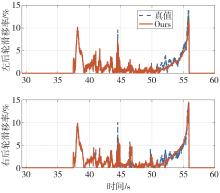
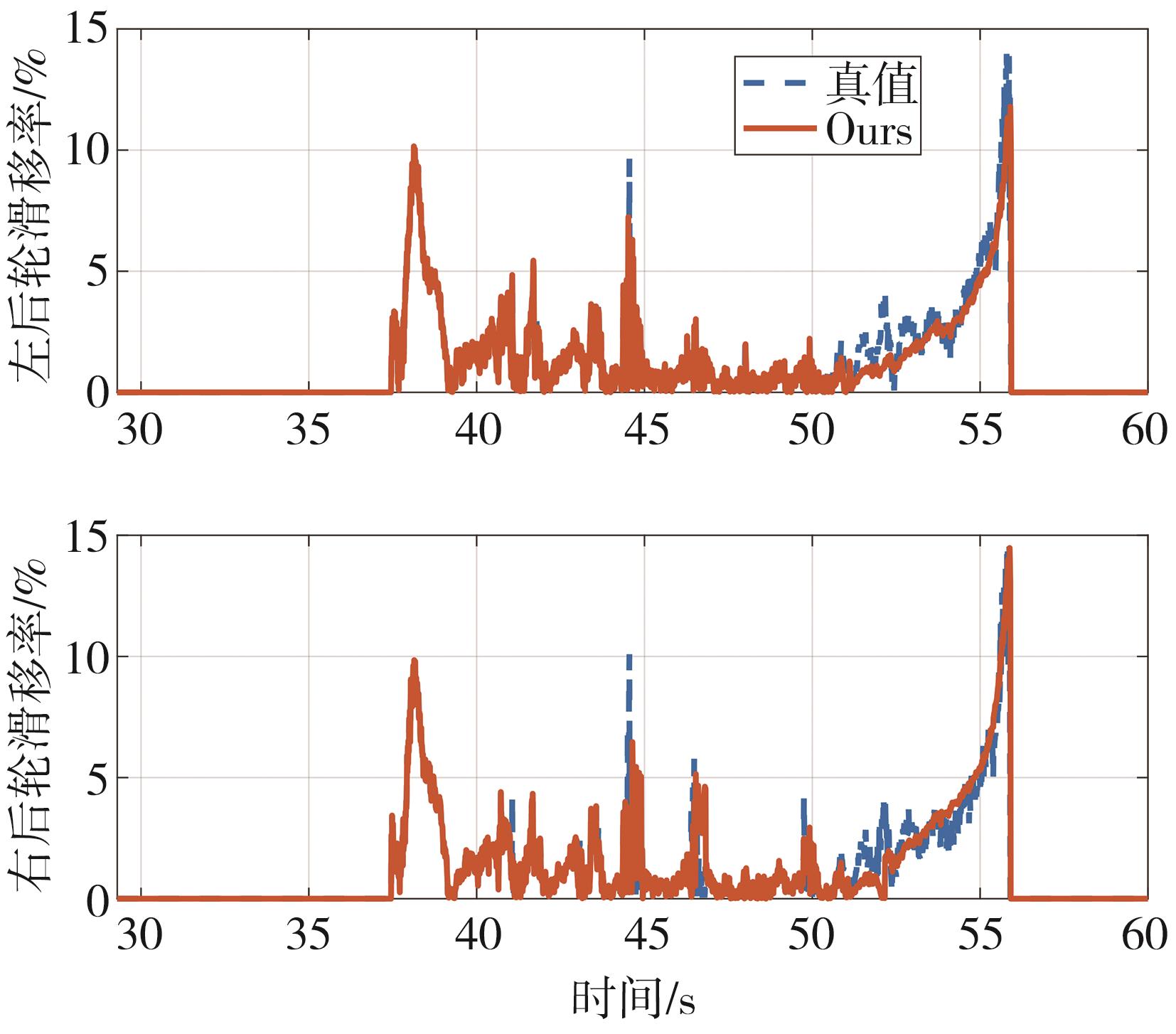
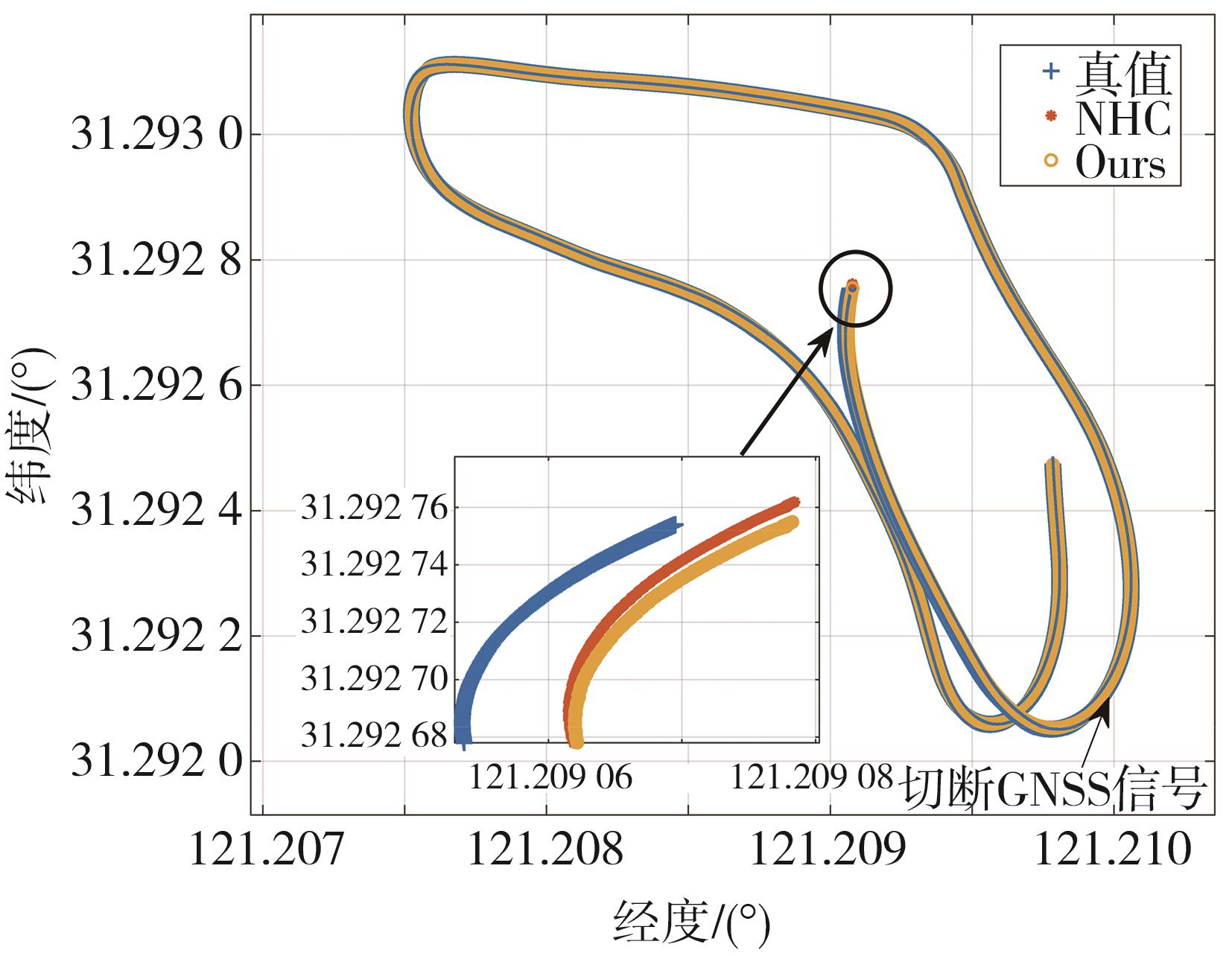
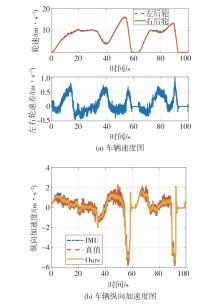
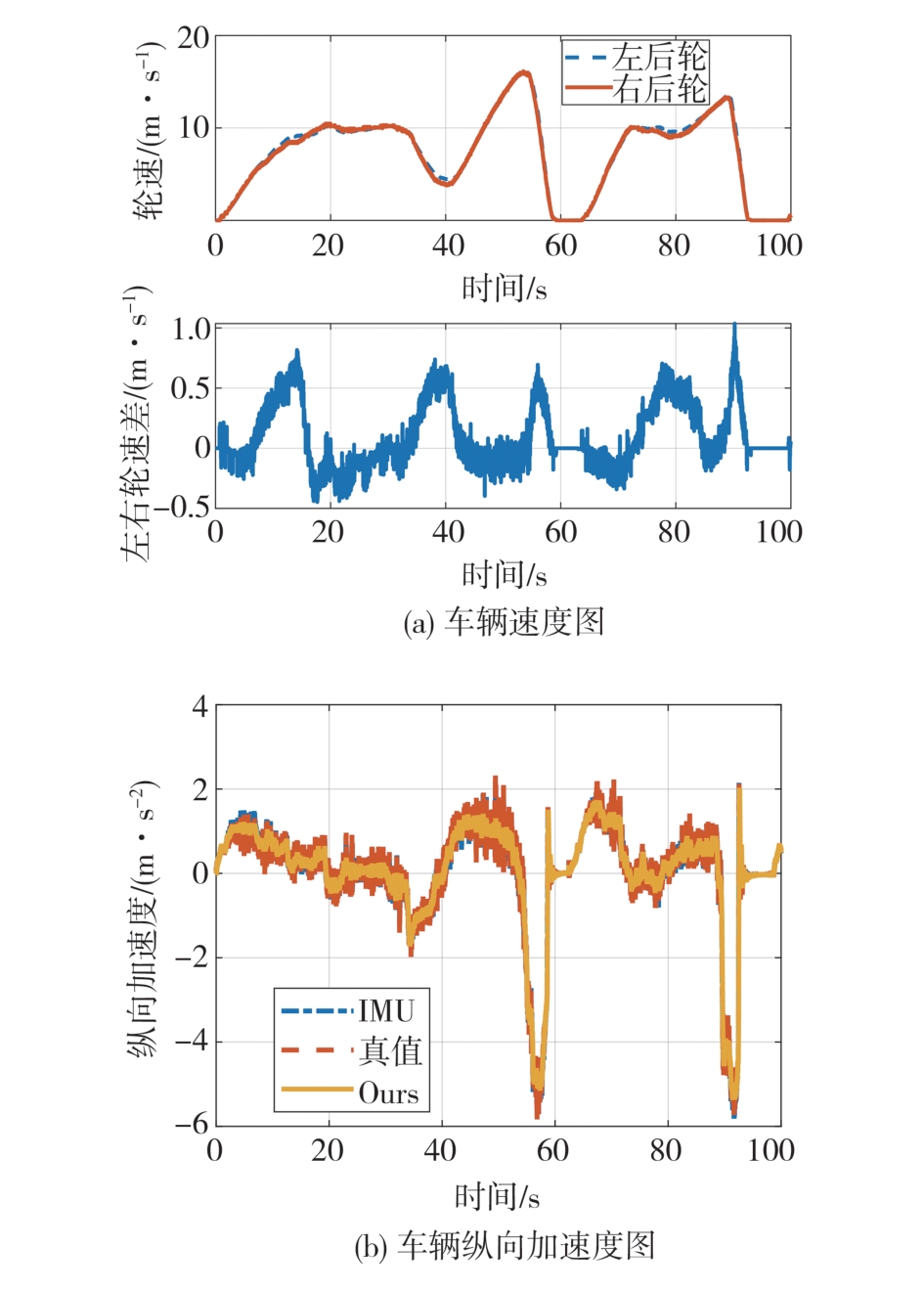
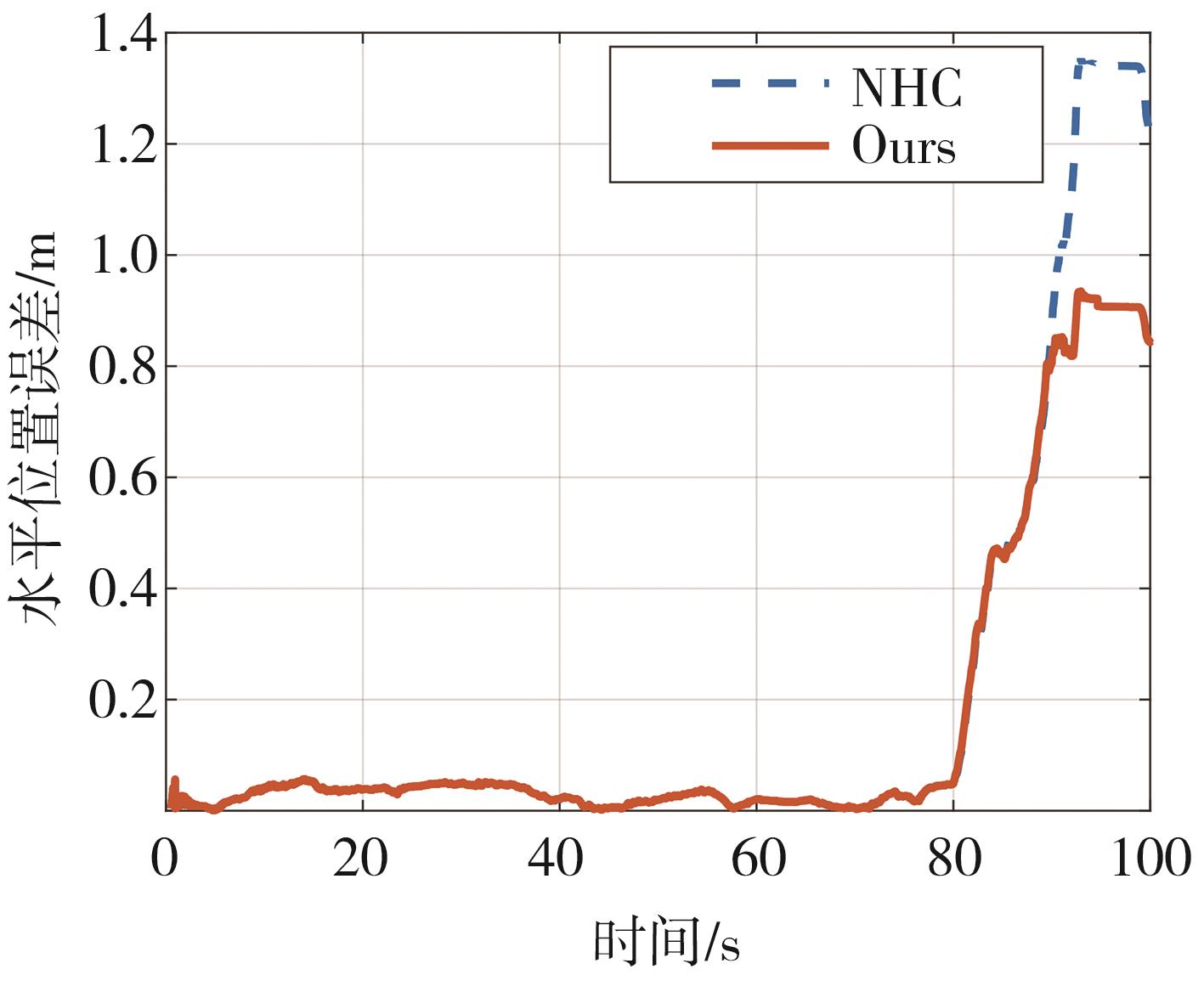
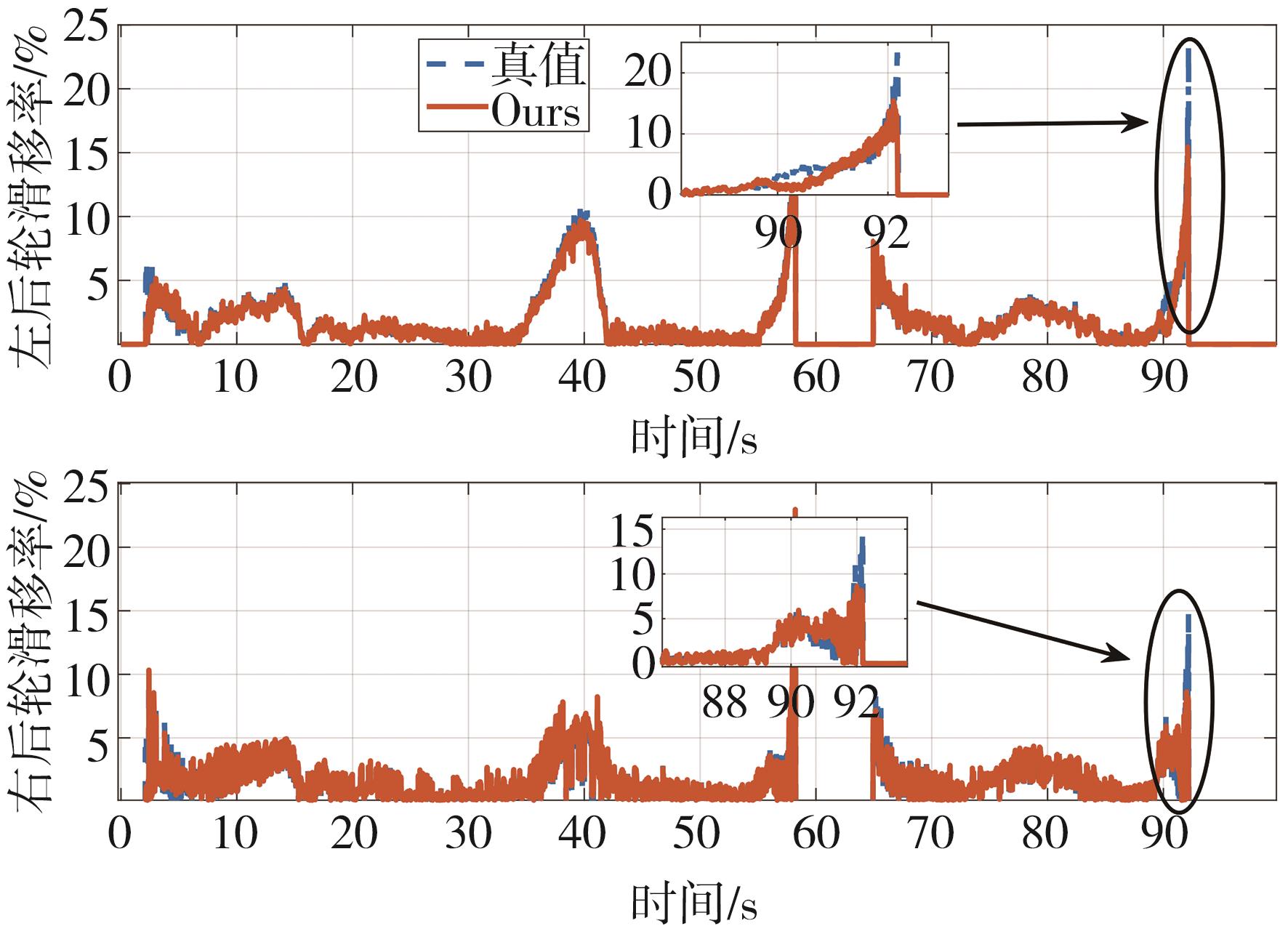
准确可靠的车辆位姿估计是智能车辆决策规划、运动控制等模块的重要输入。本文提出一种融合智能车辆轮胎滑移率在线估计及校正的定位算法,可以在全球导航卫星系统(GNSS)中断期间显著增强惯性导航系统(INS)/轮速传感器(WSS)的融合定位精度。首先,利用车辆加速度和轮速数据,提出了一种针对不同驾驶条件的滑移率实时估计算法,以准确地对轮速信息进行滑移率校正;随后,基于误差状态卡尔曼滤波对GNSS、IMU和校正后的轮速信息进行融合,实现准确可靠的车辆位姿估计。实车实验结果表明,在GNSS中断期间,速度均方根误差最高提升30%,平均水平位置误差里程比可达1.68‰。