汽车工程 ›› 2022, Vol. 44 ›› Issue (3): 330-339.doi: 10.19562/j.chinasae.qcgc.2022.03.004
所属专题: 智能网联汽车技术专题-规划&控制2022年
胡杰( ),张敏超,徐文才,陈瑞楠,钟鑫凯,朱令磊
),张敏超,徐文才,陈瑞楠,钟鑫凯,朱令磊
收稿日期:2021-10-21
修回日期:2021-12-08
出版日期:2022-03-25
发布日期:2022-03-25
通讯作者:
胡杰
E-mail:auto_hj@163.com
基金资助:
Jie Hu(),Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu
Received:2021-10-21
Revised:2021-12-08
Online:2022-03-25
Published:2022-03-25
Contact:
Jie Hu
E-mail:auto_hj@163.com
摘要:
根据对自动驾驶车辆的平行泊车场景的分析,提出一种基于采样的自动驾驶车辆平行泊车轨迹规划方法。该方法把自动驾驶车辆平行泊车的轨迹规划解耦成路径规划和速度规划。通过对泊车起始点区域采样,生成一系列曲率连续、满足路径约束的泊车路径曲线,利用多目标评价函数选取最优的泊车路径。然后,在最优泊车路径基础上,通过对时间采样选取时间最短、满足约束的S-t曲线生成泊车轨迹。最后,通过仿真和实车试验验证了该方法的可行性和有效性,成功实现自动驾驶车辆的平行泊车。
胡杰,张敏超,徐文才,陈瑞楠,钟鑫凯,朱令磊. 自动驾驶车辆的平行泊车轨迹规划[J]. 汽车工程, 2022, 44(3): 330-339.
Jie Hu,Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu. Parallel Parking Trajectory Planning for Autonomous Vehicles[J]. Automotive Engineering, 2022, 44(3): 330-339.
表1
自动泊车路径规划方法对比"
| 方法 | 计算时间 | 平滑度 | 场景适应能力 | 路径上转 折点数量 |
|---|---|---|---|---|
| 几何法 | 非常短 | 好 | 低 | 中等 |
| 多步法 | 长 | 好 | 中等 | 大量 |
| 采样法 | 中等 | 中等 | 中等 | 少 |
| 数值优化 | 非常长 | 好 | 好 | 少 |
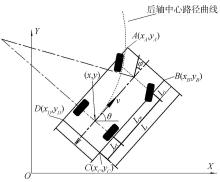
图1
汽车运动学模型"
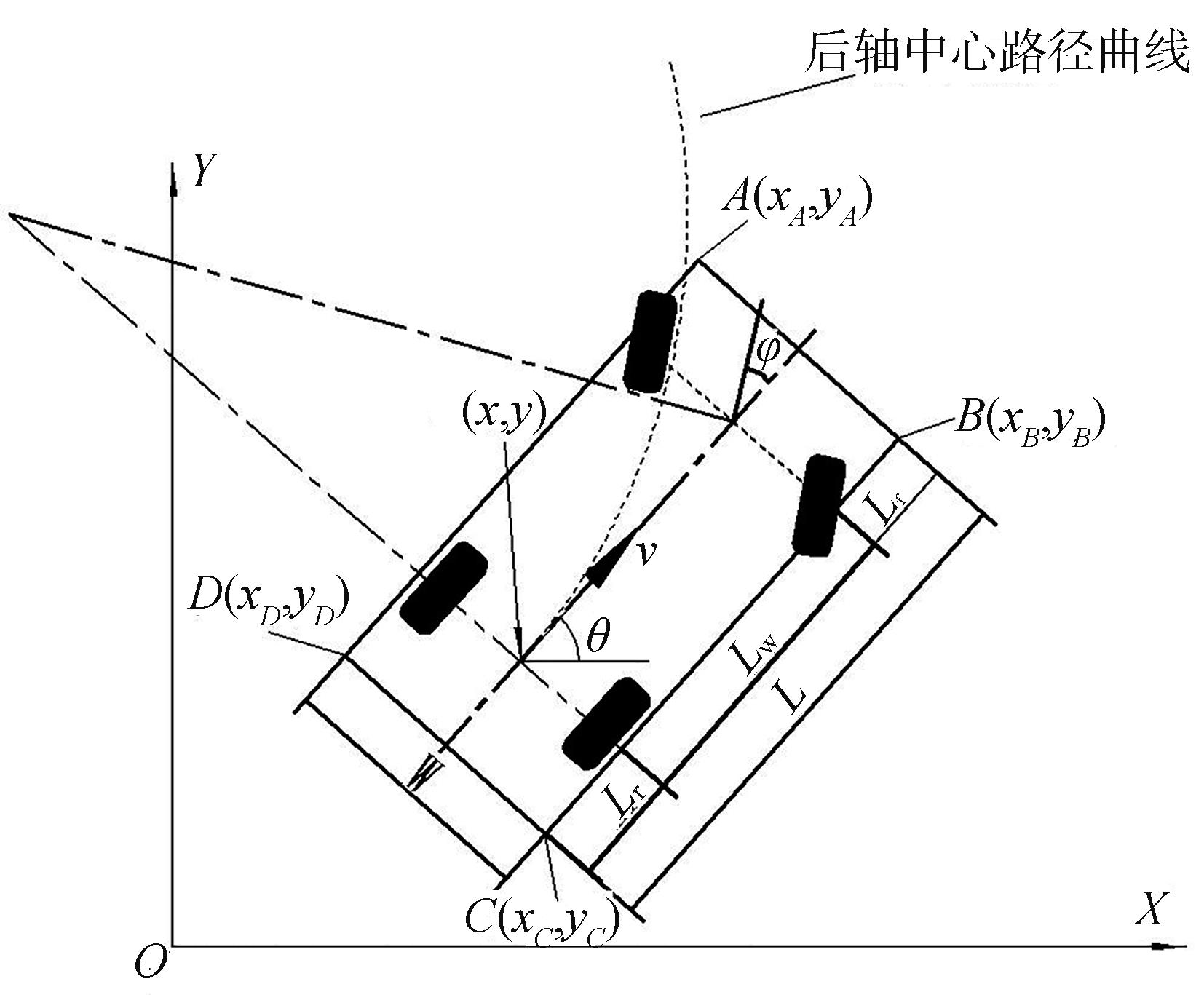
图2
平行泊车场景"
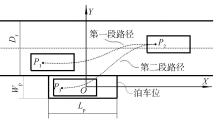
图3
泊车路径设计示意图"
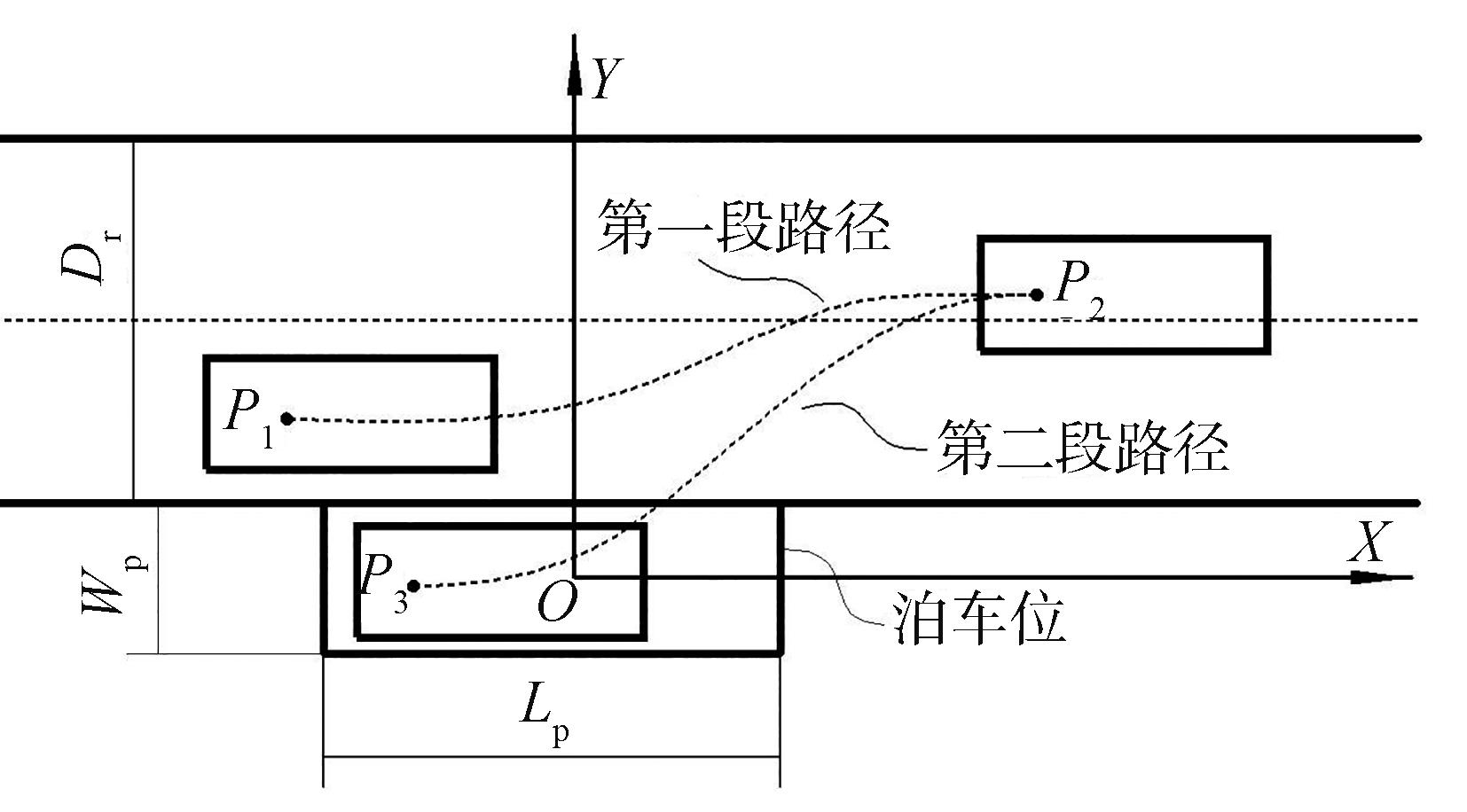
图4
第二段泊车路径"
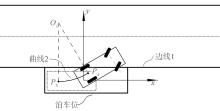
图5
第二段泊车路径中圆弧段路径"
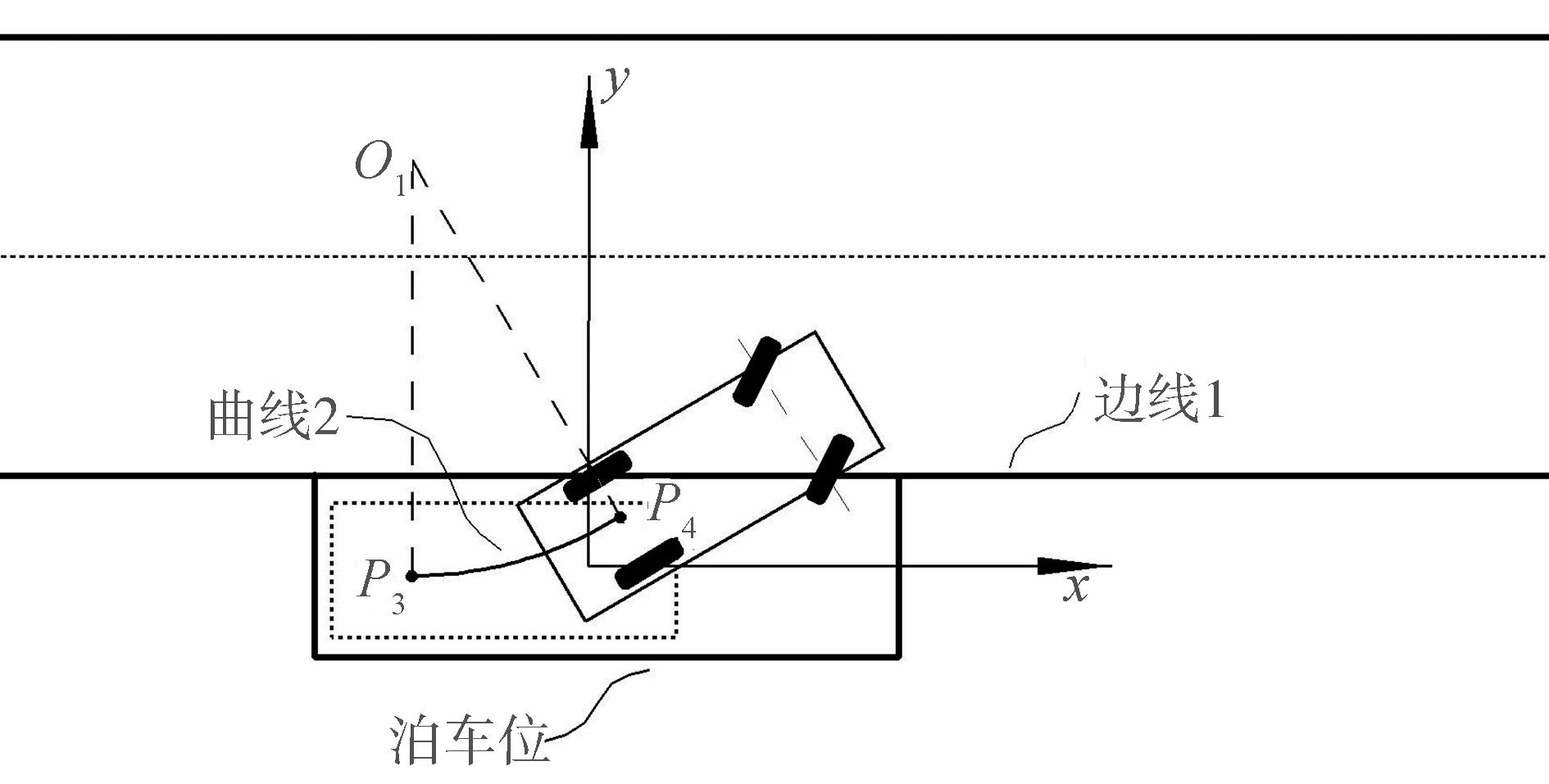
图6
泊车起始区域"
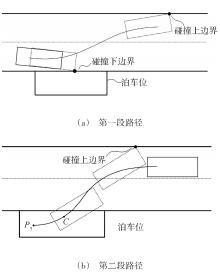
图7
路径碰撞"
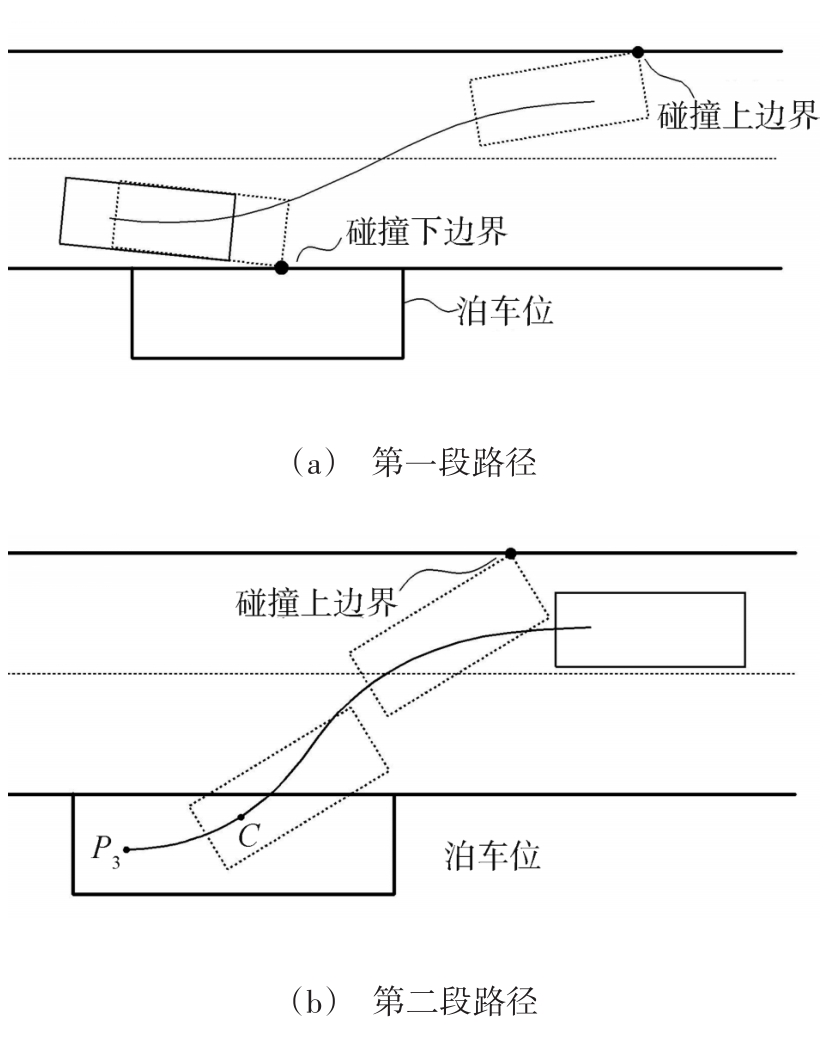
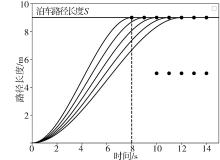
图8
速度规划"
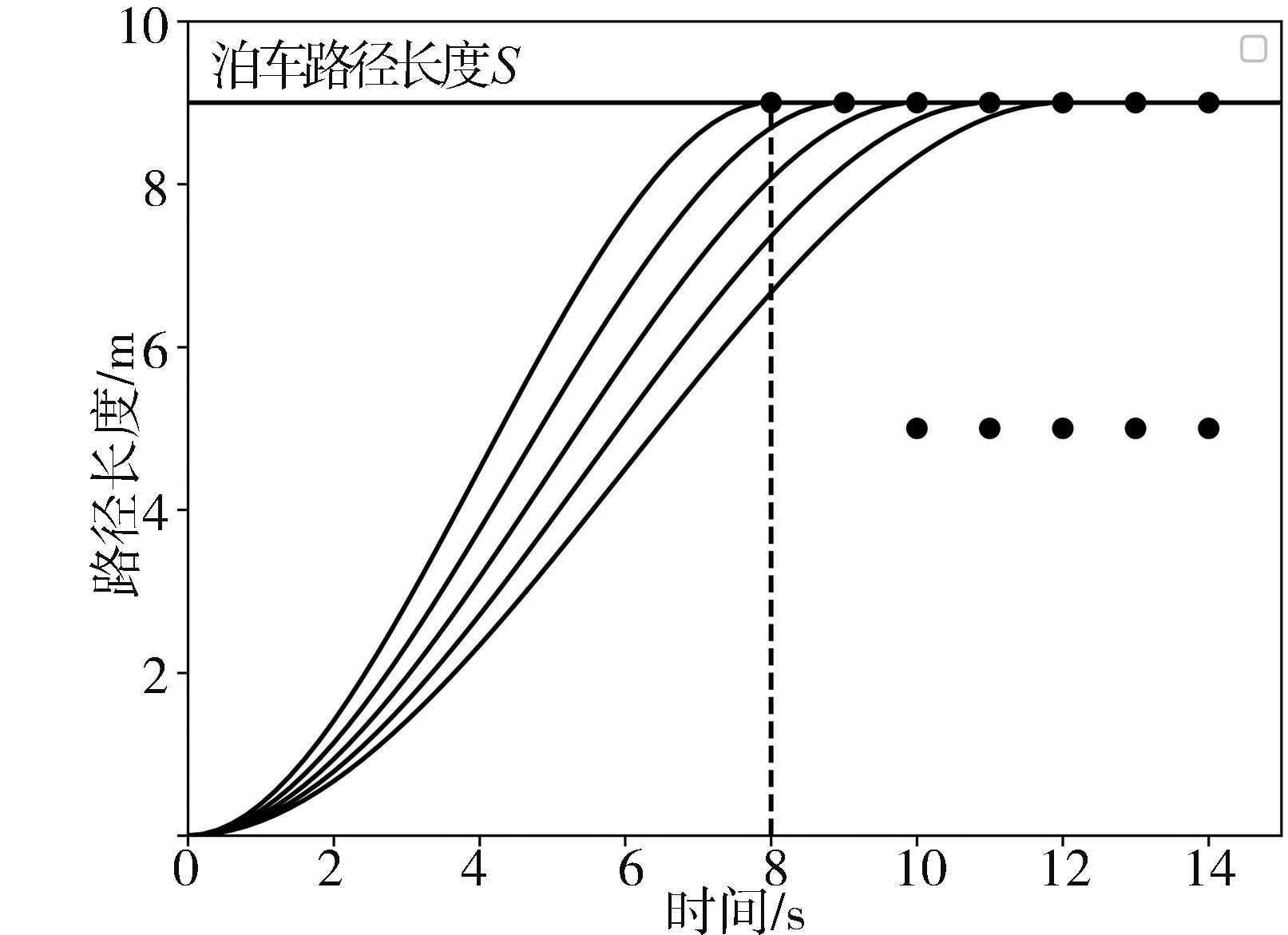
表2
车辆以及环境参数"
| 参数 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 车位长 | 7.5 | ||
| 车位宽 | 2.5 | ||
| 道路宽 | 6 | ||
| 车长 | 4.718 | ||
| 车宽 | 1.84 | ||
| 轴距长度 | 2.74 | ||
| 前悬长度 | 0.968 | ||
| 后悬长度 | 1.01 | ||
| 后轴中心最小转弯半径 | 6 | ||
| 最大前轮转向角 | 0.428 | ||
| 最大前轮转向角速度 | rad/s | 0.43 |

图9
与双圆弧平行泊车路径规划对比"
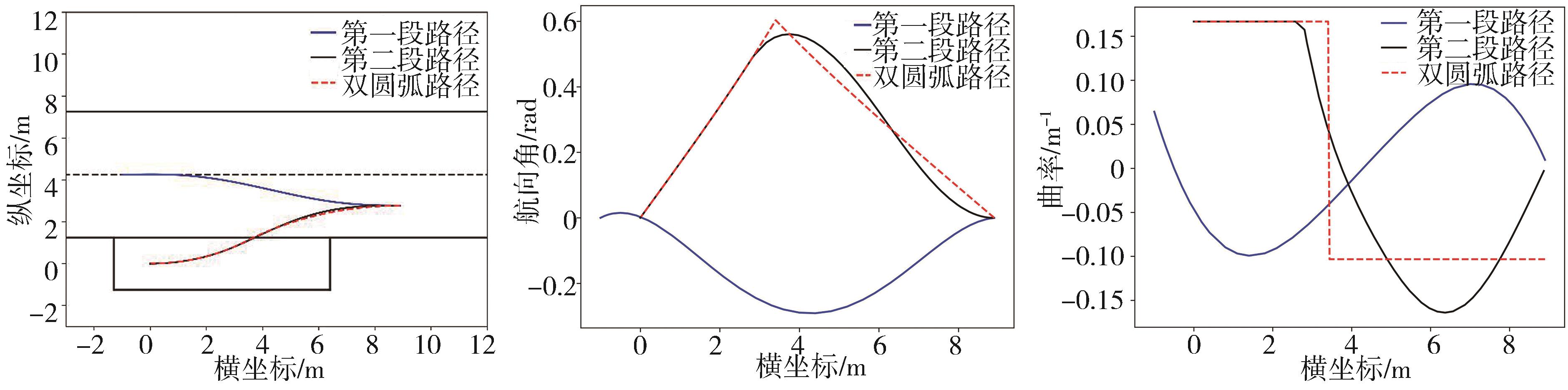
表3
规划起点的位姿"
| 工况 | 后轴中心坐标/m | 航向角/rad | 转向角/rad |
|---|---|---|---|
| ① | (-2,2.75) | 0.523(30°) | 0 |
| ② | (-2,2.75) | 0 | -0.174(10°) |
| ③ | (-1,4.25) | 0 | 0.174(-10°) |

图10
工况①仿真结果"
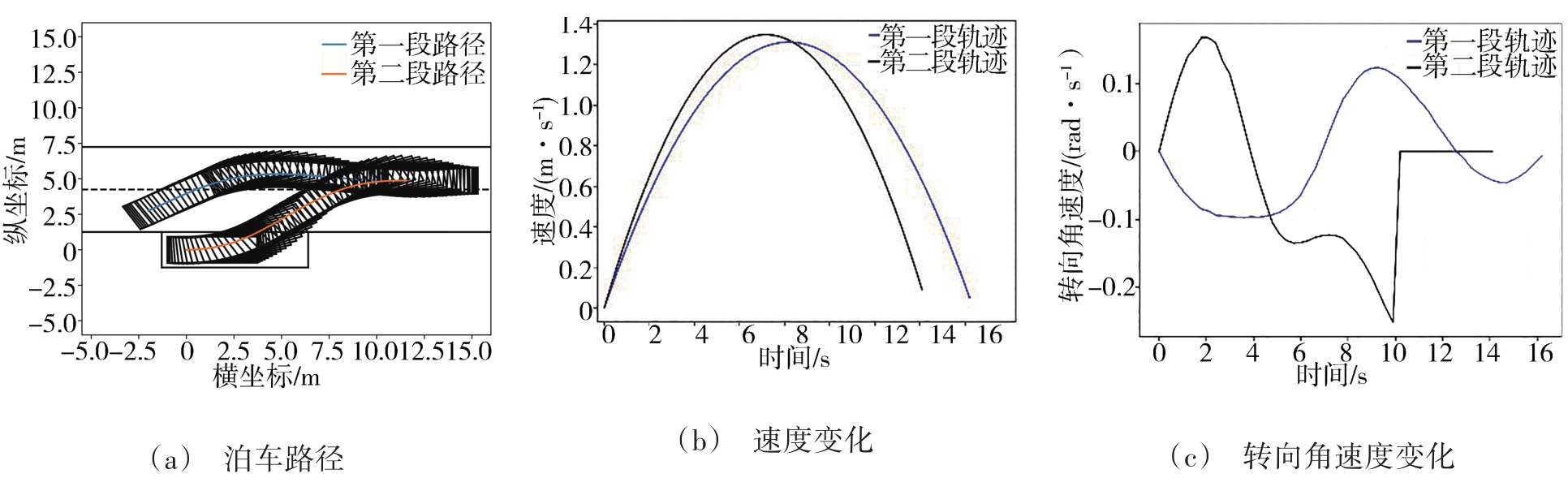
图11
工况②仿真结果"
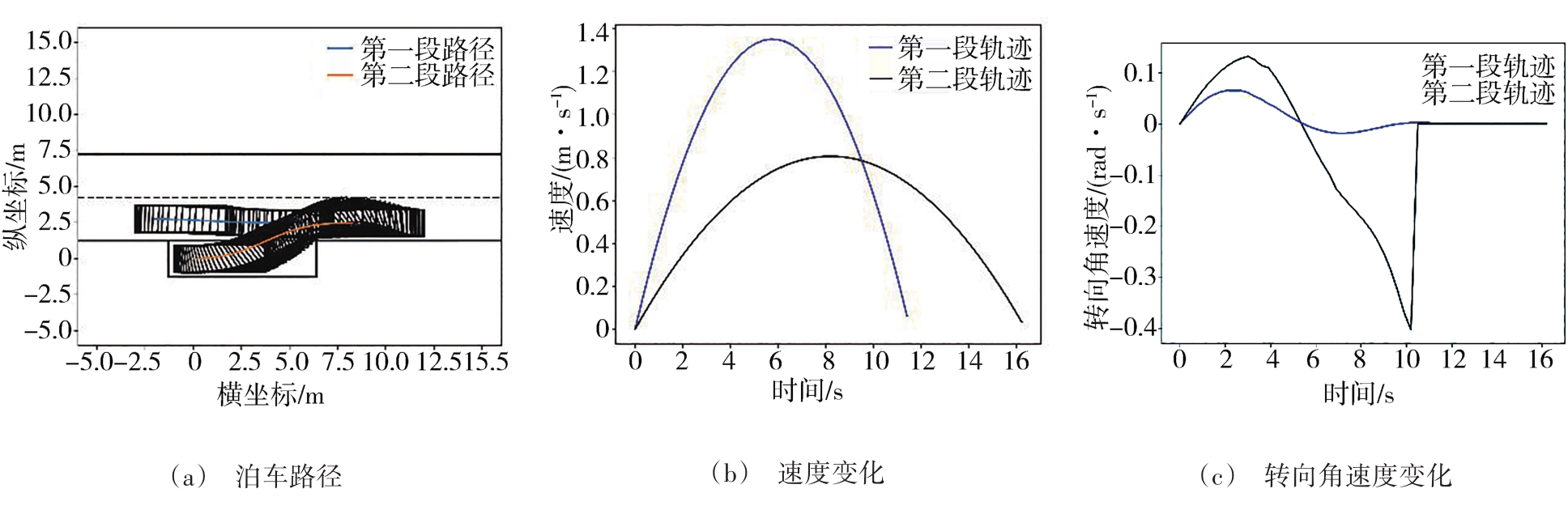
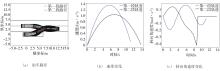
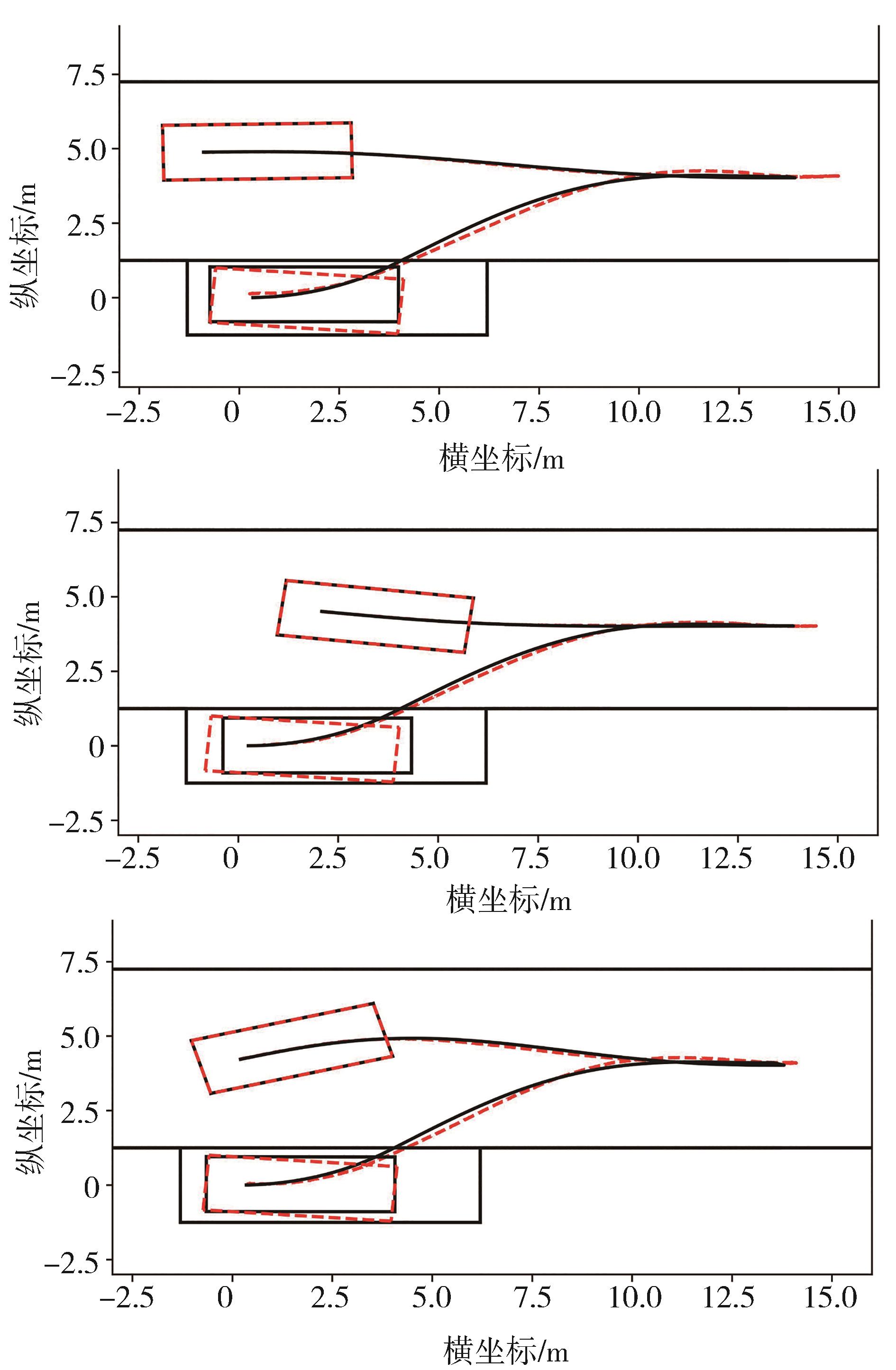
图12
工况③仿真结果"
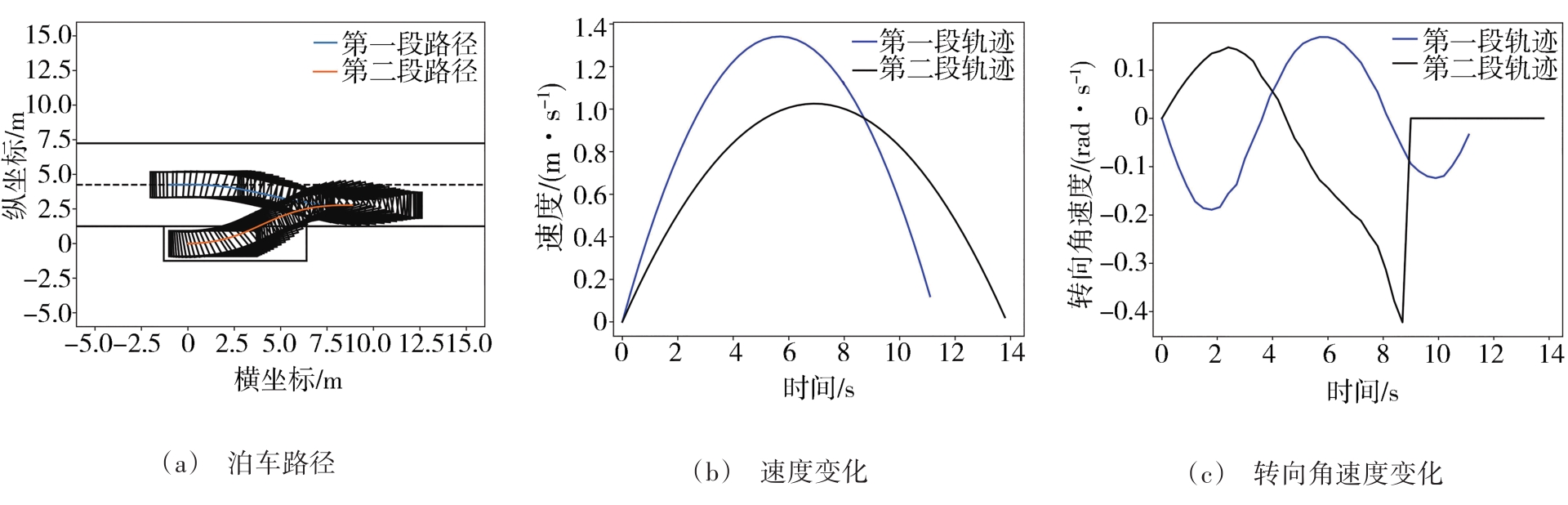
图13
试验平台软件架构"
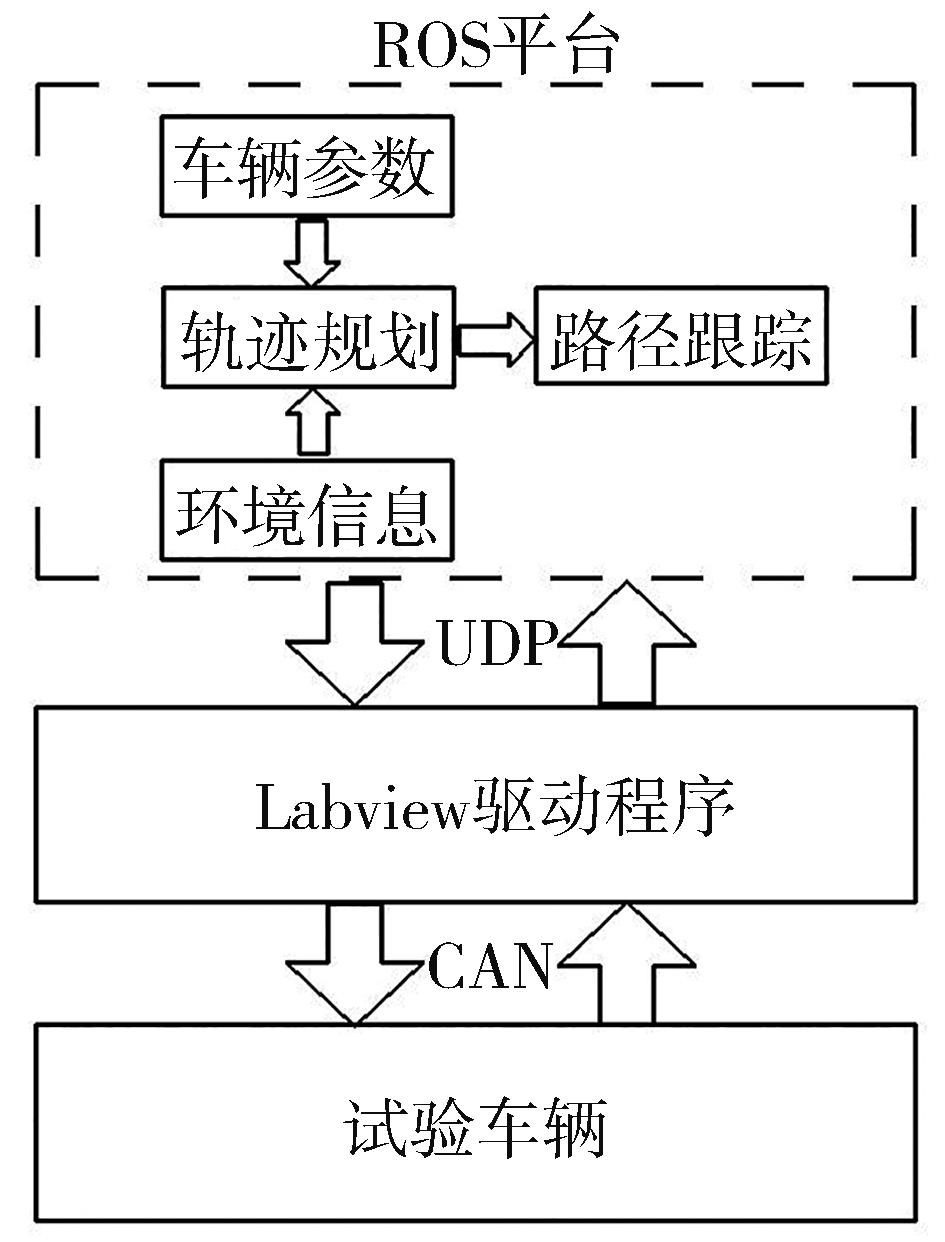

图14
试验过程"

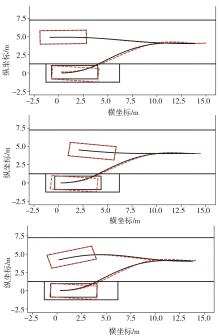
图15
实车轨迹与规划轨迹对比"
| 1 | REEDS J A,SHEPP L A. Optimal paths for a car that goes both forwards and backwards[J]. Pacific Journal of Mathematics,1990,145(2):367-393. |
| 2 | PAROMTCHIK I E,LAUGIER C. Autonomous parallel parking of nonholomic vehicles[C].Proceedings of the IEEE Intelligent Vehicles Symposium,MN:[s.n.],1996:3117-3122. |
| 3 | CHOI S, BOUSSARD C,d’ANDRÉA-Novel B.Easy path planning and robust control for automatic parallel parking[C].World Congress,2011:656-661. |
| 4 | 江浩斌,沈峥楠,马世典.基于信息融合的自动泊车系统车位智能识别[J].机械工程学报,2017,53(22):125-133. |
| JIANG H B, SHEN Z N, MA S D. Intelligent identification of automatic parking system based on information fusion[J]. Journal of Mechanical Engineering, 2017,53(22):125-133. | |
| 5 | 姜武华,辛鑫,陈无畏,等.基于信息融合的自动泊车系统多工况车位识别和决策规划[J].机械工程学报,2021,57(6):131-141. |
| JIANG W H, XIN X, CHEN W W, et al. Multi-condition parking space recognition based on information fusion and decision planning of automatic parking system[J]. Journal of Mechanical Engineering, 2021,57(6):131-141. | |
| 6 | VOROBIEVA H, MINOIU-ENACHE N GLASER S,et al. Geometric continuous curvature path planning for automatic parallel parking[C]. IEEE International Conference on Networking, Sensing and Control. IEEE,2013:418-423. |
| 7 | ZHANG Dezhao,LI Shengbo, YANG Qiang, et al. Optimization based trajectory planning of parallel parking with multiple constraints[J].SAE Int. J. Passeng. Cars-Electron. Electr. Syst. ,2015,8(2):413-418. |
| 8 | 张持,张永林.基于两段圆弧的倒推式平行泊车路径规划方法[J].计算机与数学工程,2019,47(12):3035-3040. |
| ZHANG C, ZHANG Y L. Inverted parallel parking path planning method based on the two-arc[J]. Computer & Digital Engineering,2019,47(12):3035-3040. | |
| 9 | 王启明,宗高强,胥津铭.多段式自动泊车最优路径规划与仿真分析[J].系统仿真学报. https://kns.cnki.net/kcms/detail/11.3092.V.20210204.1632.012.html. |
| WANG Q M, ZONG G Q, XU J M. Optimal path planning and simulation analysis of multi-stage automatic parking[J]. Journal of System Simulation.https://kns.cnki.net/kcms/detail/ 11.3092.V.20210204.1632.012.html. | |
| 10 | 张家旭,赵健,施正堂,等.基于回旋曲线的平行泊车路径规划和跟踪控制[J]. 吉林大学学报(工学版),2020,50(6):2247-2257. |
| ZHANG J X, ZHAO J, SHI Z T, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University (Engineering and Technology Edition),2020,50(6):2247-2257. | |
| 11 | 魏翠芳.基于超声波传感器的平行车位自动泊车轨迹规划[J].农业装备与车辆工程,2020,58(7):106-109. |
| WEI C F. Automatic parking trajectory planning for parallel parking spaces based on ultrasonic sensors[J]. Agricultural Equipment & Vehicle Engineering, 2020,58(7):106-109. | |
| 12 | 吴玲玉,白国振,管登诗.自动泊车的运动轨迹规划[J].农业装备与车辆工程,2017,55(9):85-89. |
| WU Y L, BAI G Z, GUAN D S. Trajectory planning of automatic parking[J]. Agricultural Equipment & Vehicle Engineering, 2017,55(9):85-89. | |
| 13 | 胡勤明,王金刚,张小俊.五次多项式优化的平行泊车路径规划[J].计算机工程与应用. https://kns.cnki.net/kcms/detail/11.2127.TP.20210325.1007.008.html. |
| HU Q M,WANG J G, ZHANG X J. Optimized parallel parking path planning based on quintic polynomial[J]. Computer Engineering and Applications.https://kns.cnki.net/kcms/ detail/11.2127.TP.20210325.1007.008.html. | |
| 14 | 张家旭,王晨,赵健,等.面向狭小平行泊车位的路径规划与跟踪控制[J].吉林大学学报(工学版). https://doi.org/10.13229/j.cnki.Jdxbgxb20200417. |
| ZHANG J X, WANG C, ZAHO J, et al. Path planning and tracking control for narrow parallel parking space[J].Journal of Jilin University (Engineering and Technology Edition). https://doi.org/10.13229/j. cnki.Jdxbgxb20200417. | |
| 15 | 熊莹,毛雪松.基于二段多项式的窄空间平行泊车路径规划方法[J].计算机系统应用,2020,29(8):211–216. |
| XIONG Y, MAO X S. Path planning by two-piece polynomial equation in narrow space for parallel parking[J]. Computer Systems & Applications,2020,29(8):211–216. | |
| 16 | LAUMOND J P, JACOBS P E, TAIX M, et al. A motion planner for nonholonomic mobile robots[J]. IEEE Transactions on Robotics and Automation, 1994.10(5):577–593. |
| 17 | LAUMOND J P, SEKHAVAT S, VAISSET M.Collision-free motion planning for a nonholonomic mobile robot with trailers[J]. IFAC Proceedings Volumes,1994,27(14): 171–177. |
| 18 | KIM D, CHUNG W. Motion planning for car parking using the slice projection technique[C]. 2008 IEEE/RSJ International Conference on Intelligent Robots and System, 2008:1050–1055. |
| 19 | KONDAK K, HOMMEL G. Computation of time optimal movements for autonomous parking of nonholonomic mobile platforms[C]. Proceedings of the 2001 IEEE International Conference on Robotics & Automation, 2001: 2698–2703. |
| 20 | LI B, WANG K, SHAO Z.Time-optimal maneuver planning in automatic parallel parking using a simultaneous dynamic optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016,17(11): 3263–3274. |
| 21 | 郭孔辉. 预瞄跟随理论与人一车闭环系统大角度操纵运动仿真[J].汽车工程,1992,14(1):1-11. |
| GUO K H. Preview follower theory and simulations of large angle cornering motion of a man-vehicle system[J]. Automotive Engineering,1992,14(1):1-11. |
| [1] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [2] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [3] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [4] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [5] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [6] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [9] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
|