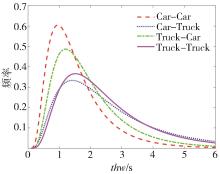
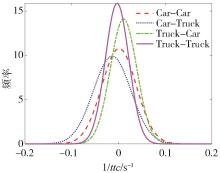
| 1 |
SAIFUZZAMAN M, ZHENG Z. Incorporating human-factors in car-following models: a review of recent developments and research needs[J]. Transportation Research Part C: Emerging Technologies, 2014,48: 379-403.
|
| 2 |
田钧方, 朱陈强, 贾宁, 等. 基于轨迹数据的车辆跟驰行为分析与建模综述[J]. 交通运输系统工程与信息, 2021,21(5): 148-159.
|
|
TIAN J F, ZHU C Q, JIA N, et al. Review of car-following behavior analysis and modeling based on trajectory data[J]. Journal of Transportation Systems Engineering and Information Technology, 2021,21(5): 148-159.
|
| 3 |
KONG D, LIST G F, GUO X, et al. Modeling vehicle car-following behavior in congested traffic conditions based on different vehicle combinations[J]. Transportation Letters, 2018,10(5): 280-293.
|
| 4 |
LIU L, ZHU L, YANG D. Modeling and simulation of the car-truck heterogeneous traffic flow based on a nonlinear car-following model[J]. Applied Mathematics and Computation, 2016,273: 706-717.
|
| 5 |
SUN Z, YAO X, QIN Z, et al. Modeling car-following heterogeneities by considering leader–follower compositions and driving style differences[J]. Transportation Research Record: Journal of the Transportation Research Board, 2021,2675(11): 851-864.
|
| 6 |
PARK M, KIM Y, YEO H. Development of an asymmetric car-following model and simulation validation[J]. IEEE Transactions on Intelligent Transportation Systems, 2020,21(8): 3513-3524.
|
| 7 |
KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018.
|
| 8 |
王雪松, 孙平, 张晓春, 等. 基于自然驾驶数据的高速公路跟驰模型参数标定[J]. 中国公路学报, 2020,33(5): 132-142.
|
|
WANG X S, SUN P, ZHANG X C, et al. Calibrating car-following models on freeway based on naturalistic driving data[J]. China Journal of Highway Transportation, 2020,33(5): 132-142.
|
| 9 |
杨龙海, 赵顺, 徐洪. 基于改进优化速度函数的跟驰模型研究[J]. 交通运输系统工程与信息, 2017,17(2): 41-46.
|
|
YANG L H, ZHAO S, XU H. Car-following model based on the modified optimal velocity function[J]. Journal of Transportation Systems Engineering and Information Technology, 2017,17(2): 41-46.
|
| 10 |
付锐, 袁小慧, 郭应时, 等. 相邻车道车辆并道预测与跟车控制改进的研究[J]. 汽车工程, 2017,39(10): 1106-1113.
|
|
FU R, YUAN X, GUO Y, et al. A study on the merging prediction of the vehicle on adjacent lane and the improvement of vehicle-following control[J]. Automotive Engineering, 2017,39(10): 1106-1113.
|
| 11 |
郭海锋, 袁鑫良, 徐东伟. 车辆跟驰模型参数标定中的性能指标选择[J]. 中国公路学报, 2017,30(1): 103-110.
|
|
GUO H F, YUAN X L, XU D W. Selection of measures of performance on calibrating parameters in car following models[J]. China Journal of Highway Transportation, 2017,30(1): 103-110.
|
| 12 |
袁伟, 付锐, 马勇, 等. 基于高速实车驾驶数据的驾驶人跟车模型研究[J]. 汽车工程, 2015,37(6): 679-685.
|
|
YUAN W, FU R, MA Y, et al. A study on driver’s vehicle-following model based on high speed real driving data[J]. Automotive Engineering, 2015,37(6): 679-685.
|
| 13 |
KESTING A, TREIBER M. Calibrating car-following models by using trajectory data[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008,2088(1): 148-156.
|
| 14 |
NI D, LEONARD J D, JIA C, et al. Vehicle longitudinal control and traffic stream modeling[J]. Transportation Science, 2016,50(3): 1016-1031.
|
| 15 |
LIN Y, WANG P, ZHOU Y, et al. Platoon trajectories generation: a unidirectional interconnected LSTM-based car-following model[J]. IEEE Transactions on Intelligent Transportation Systems, 2022,23(3): 2071-2081.
|
| 16 |
梁军, 王军, 杨云庆, 等. 网联车对抗神经网络跟驰模型[J]. 汽车工程, 2021,43(2): 189-195.
|
|
LIANG J, WANG J,YANG Y Q, et al. A connected and autonomous vehicle following model based on generative adversarial network[J]. Automotive Engineering, 2021,43(2): 189-195.
|
| 17 |
郭景华, 李文昌, 罗禹贡, 等. 基于深度强化学习的驾驶员跟车模型研究[J]. 汽车工程, 2021,43(4): 571-579.
|
|
GUO J H, LI W C, LUO Y G, et al. Driver car⁃following model based on deep reinforcement learning[J]. Automotive Engineering, 2021,43(4): 571-579.
|
| 18 |
ZHU M, WANG X, WANG Y. Human-like autonomous car-following model with deep reinforcement learning[J]. Transportation Research Part C: Emerging Technologies, 2018,97: 348-368.
|
| 19 |
倪捷, 张凯铎, 刘志强, 等. 自适应期望跟车间距和行为习惯的驾驶人跟驰模型[J]. 交通运输系统工程与信息, 2022: 1-10.
|
|
NI J, ZHANG K D, LIU Z Q, et al. Car-following model with adaptive expected driver’s following distance and behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2022: 1-10.
|
| 20 |
赵健, 宋东鉴, 朱冰, 等. 基于自学习和监督学习混合驱动的智能汽车跟驰控制策略[J]. 中国公路学报, 2022,35(3): 55-65.
|
|
ZHAO J, SONG D J, ZHU B, et al. Intelligent vehicle-following control strategy based on self-learning and supervised-learning hybrid-driven framework[J]. China Journal of Highway Transportation, 2022,35(3): 55-65.
|
| 21 |
KONDOH T, YAMAMURA T, KITAZAKI S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations[J]. Journal of Mechanical Systems for Transportation and Logistics, 2008,1(2): 170-180.
|
 ),王建强,李克强
),王建强,李克强