汽车工程 ›› 2022, Vol. 44 ›› Issue (11): 1636-1646.doi: 10.19562/j.chinasae.qcgc.2022.11.002
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
陈浩1,2,王红3,李维汉1,2,白先旭1,2( ),陈炯4,李楚照3,5,石琴1,2,孙骏1,2
),陈炯4,李楚照3,5,石琴1,2,孙骏1,2
收稿日期:2022-05-06
修回日期:2022-06-16
出版日期:2022-11-25
发布日期:2022-11-19
通讯作者:
白先旭
E-mail:bai@hfut.edu.cn
基金资助:
Hao Chen1,2,Hong Wang3,Weihan Li1,2,Xianxu Bai1,2(),Jiong Chen4,Chuzhao Li3,5,Qin Shi1,2,Jun Sun1,2
Received:2022-05-06
Revised:2022-06-16
Online:2022-11-25
Published:2022-11-19
Contact:
Xianxu Bai
E-mail:bai@hfut.edu.cn
摘要:
面向自动驾驶车辆预期功能安全(SOTIF)场景的不同测试标定要求和侧重,本文提出了一种基于行车安全场(DSF)理论的SOTIF场景风险评估方法。首先,利用DSF对场景的各层元素进行风险量化,从而实现风险的集成计算。通过分析SOTIF场景的定义与架构和DSF模型的参数,证明该模型满足SOTIF场景的风险评估要求。接着将所提方法应用于3类车辆运行场景的划分中,分别是已知安全、已知不安全和未知安全/不安全。为实现场景的划分,将DSF理论中不同的驾驶状态与SOTIF中车辆的运行场景进行匹配。最后,进行了封闭场地和开放道路的测试。一方面将相对驾驶安全系数指标RDSI与碰撞时间TTC指标作对比,验证了RDSI可更准确、敏感地评估行车风险。另一方面,证明了所提方法可有效地实现场景划分。
陈浩,王红,李维汉,白先旭,陈炯,李楚照,石琴,孙骏. 基于行车安全场理论的预期功能安全场景风险评估[J]. 汽车工程, 2022, 44(11): 1636-1646.
Hao Chen,Hong Wang,Weihan Li,Xianxu Bai,Jiong Chen,Chuzhao Li,Qin Shi,Jun Sun. Risk Assessment of Safety of the Intended Functionality Scenes Based on Driving Safety Field Theory[J]. Automotive Engineering, 2022, 44(11): 1636-1646.
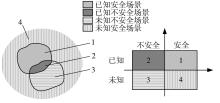
图1
SOTIF中车辆运行场景的分类"
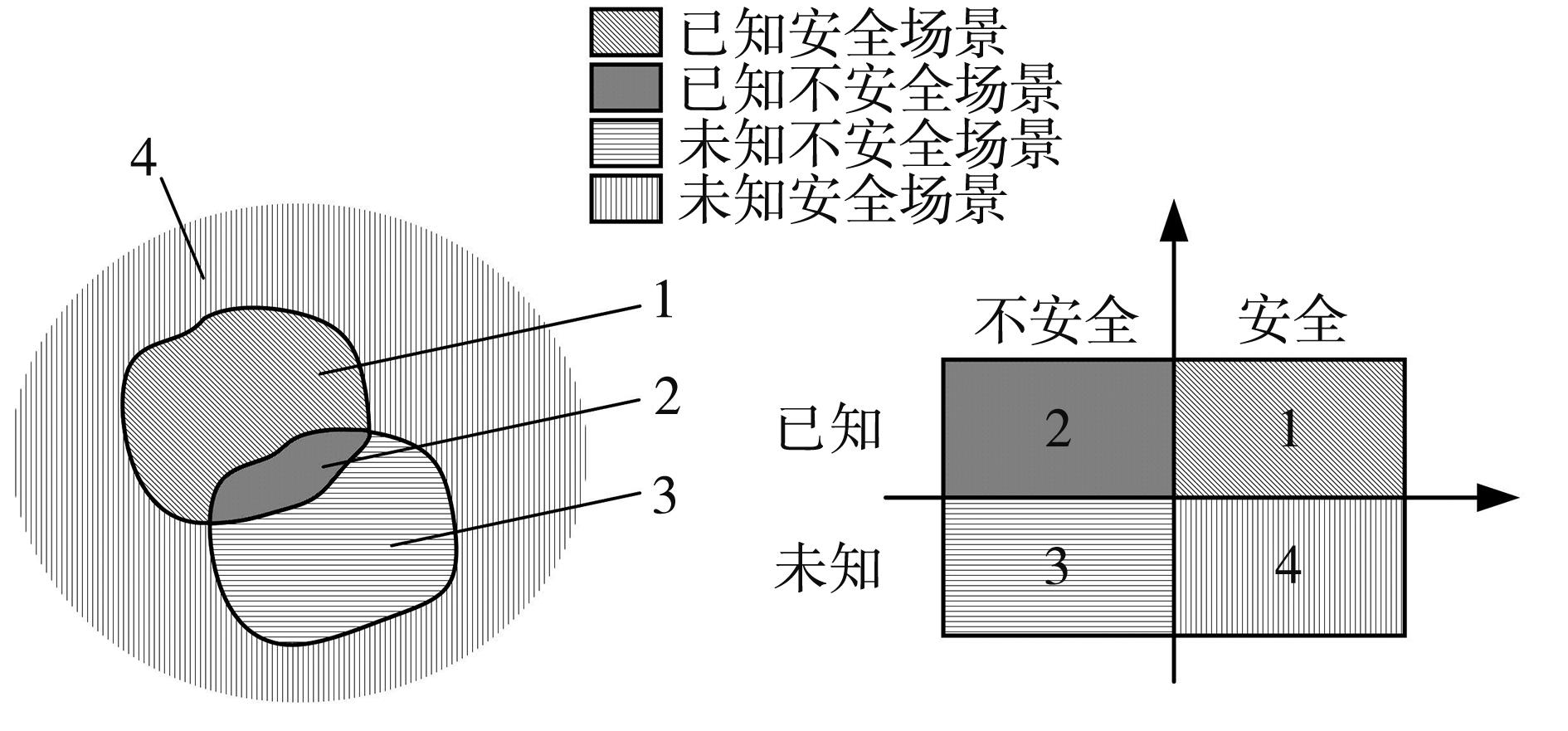
表1
场景的层级描述"
| 场景层级 | 元素描述 |
|---|---|
| 层级1:道路结构 | 道路形状、车道类型、地标 |
| 层级2:交通设施 | 交通信号、路灯、树木 |
| 层级3:道路临时事件 | 道路工作、可逆车道 |
| 层级4:交通参与者 | 车辆、行人、障碍物 |
| 层级5:气候环境 | 天气、光照、风 |
| 层级6:通信状态 | 通信类型、计算边缘 |
| 层级7:自车信息 | 传感器、计算设备 |
表2
基于DSF模型的SOTIF场景划分"
| SOTIF场景 | RDSI范围 | 车辆运行状态 |
|---|---|---|
| 区域1:已知安全场景 | RDSI < RDSI1* | 安全 |
| 区域2:已知不安全场景 | RDSI > RDSI1** | 非常危险 |
| 区域3:未知不安全场景 | RDSI1* < RDSI < RDSI2* | 危险 |
| 区域4:未知安全场景 |

图2
车辆不同驾驶状态与RDSI的关系"
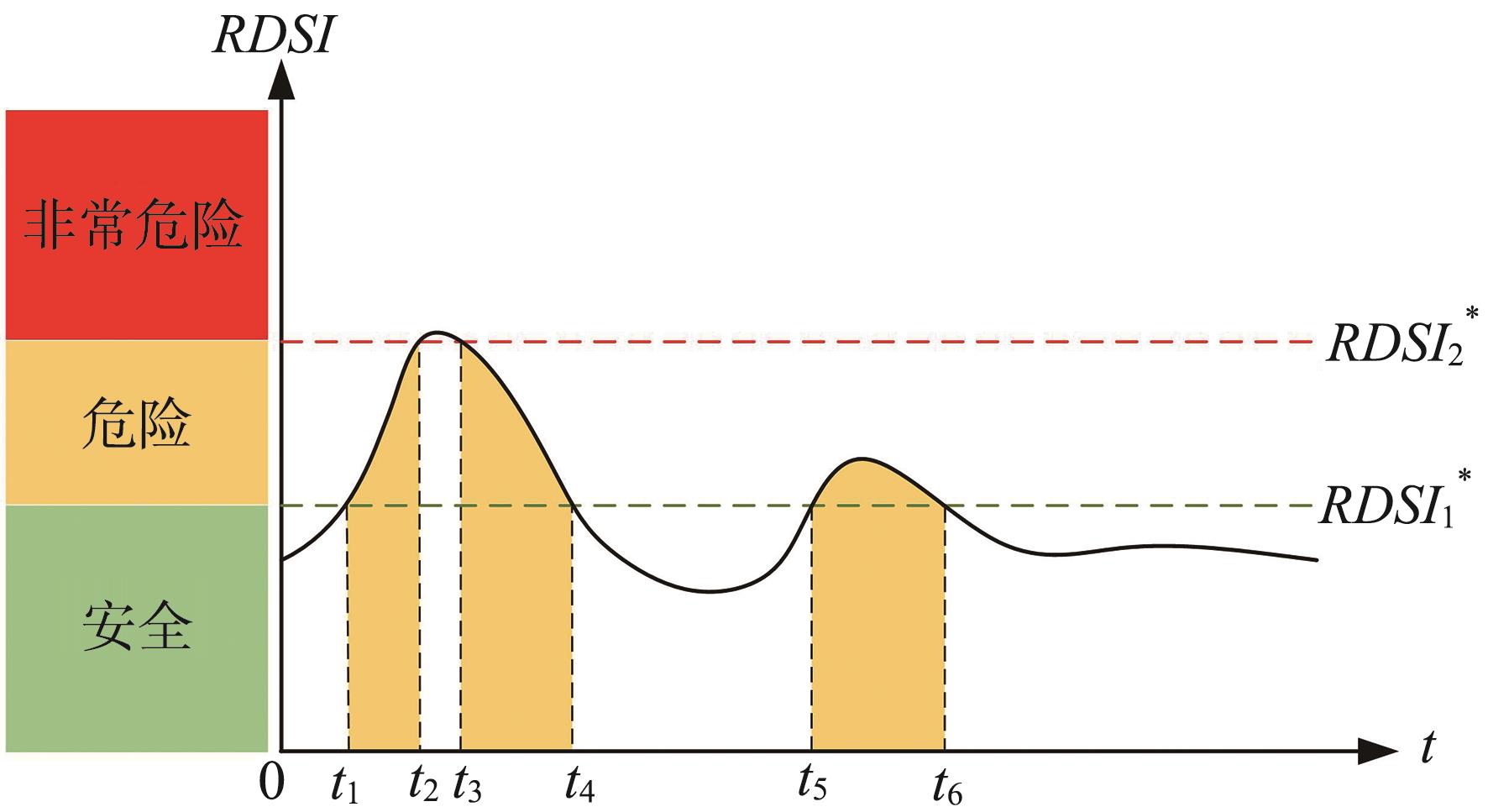
表3
DSF模型中参数的意义与类型"
| 参数符号 | 物理意义 | 参数类型 |
|---|---|---|
| Ti | 物体类型 | 离散型 |
| mi | 物体质量 | 连续型 |
| vi | 物体速度 | 连续型 |
| δi | 能见度 | 离散型 |
| μi | 路面附着系数 | 连续型 |
| ρi | 道路曲率 | 离散型 |
| τi | 道路坡度 | 离散型 |
| DRi_p | 身心状态 | 离散型 |
| DRi_c | 认知水平 | 离散型 |
| DRi_s | 驾驶技能 | 离散型 |
| DRi_v | 违法行为 | 离散型 |
表4
2010-2016年中国道路安全交通事故数据(道路等级)"
| 道路等级 | 平均速度/(km·h-1) | 单位事故损失/元 |
|---|---|---|
| 高速公路 | 100 | 38 666.0 |
| 一级公路 | 70 | 6 385.8 |
| 二级公路 | 50 | 4 477.9 |
| 三级公路 | 35 | 3 561.2 |
| 四级公路 | 30 | 3 090.7 |

图3
单位事故损失和道路平均车速的关系"
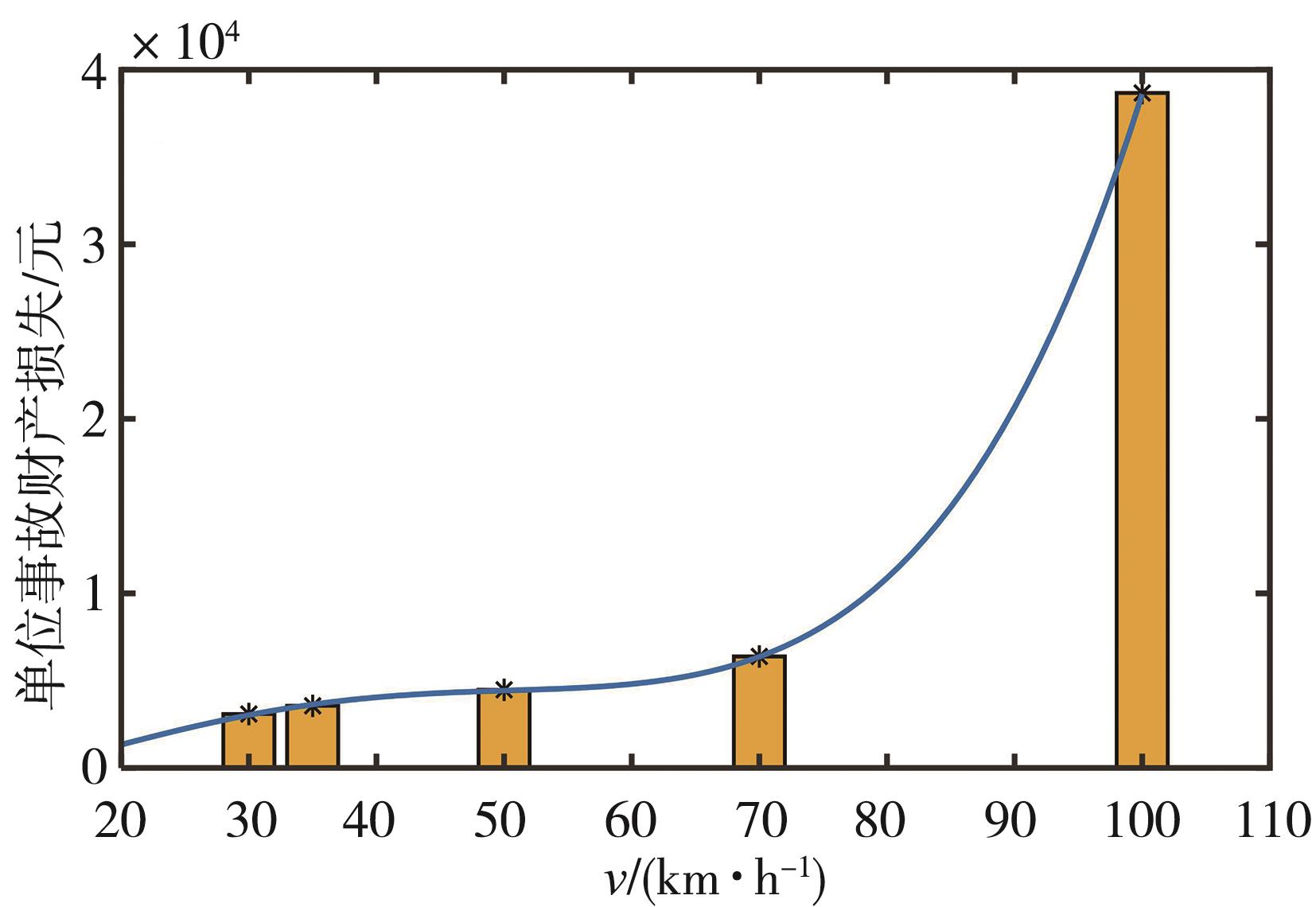
表5
5种道路物体的单位事故损失与标定值"
| 编号i | 物体类别Ti | 单位事故损失/元 | ψ(Ti ) |
|---|---|---|---|
| 1 | 汽车 | 5 630 | 1.000 |
| 2 | 载货车 | 8 124 | 1.443 |
| 3 | 摩托车 | 1 887 | 0.335 |
| 4 | 非机动车 | 1 769 | 0.314 |
| 5 | 行人 | 6 393 | 1.136 |
表6
4种能见度的单位事故损失和标定值"
| 编号i | 能见度δi /m | 单位事故损失/元 | ψ(δi ) |
|---|---|---|---|
| 1 | < 50 | 4 274.0 | 1.000 |
| 2 | 50-100 | 4 392.4 | 1.028 |
| 3 | 100-200 | 4 711.6 | 1.102 |
| 4 | > 200 | 6 225.3 | 1.457 |
表7
不同道路线形的单位事故损失标定值"
| 道路曲率 | 道路坡度 | |||
|---|---|---|---|---|
| τ1 | τ2 | τ3 | τ4 | |
| ρ1 | 1.000 | 1.613 | 1.374 | 4.161 |
| ρ2 | 1.177 | 1.410 | 1.570 | |
| ρ3 | 1.277 | 1.276 | 1.409 | |
表8
2010-2016年中国道路安全交通事故数据(路面状态)"
| 路面状态 | 路面附着系数 | 单位事故损失/元 |
|---|---|---|
| 干燥 | 0.90 | 4 990.6 |
| 潮湿 | 0.60 | 6 677.3 |
| 积水 | 0.50 | 6 794.7 |
| 泥泞 | 0.55 | 4 458.7 |
| 漫水 | 0.30 | 6 472.6 |
| 冰雪 | 0.20 | 10 250.3 |

图4
单位事故损失和路面附着系数的关系"
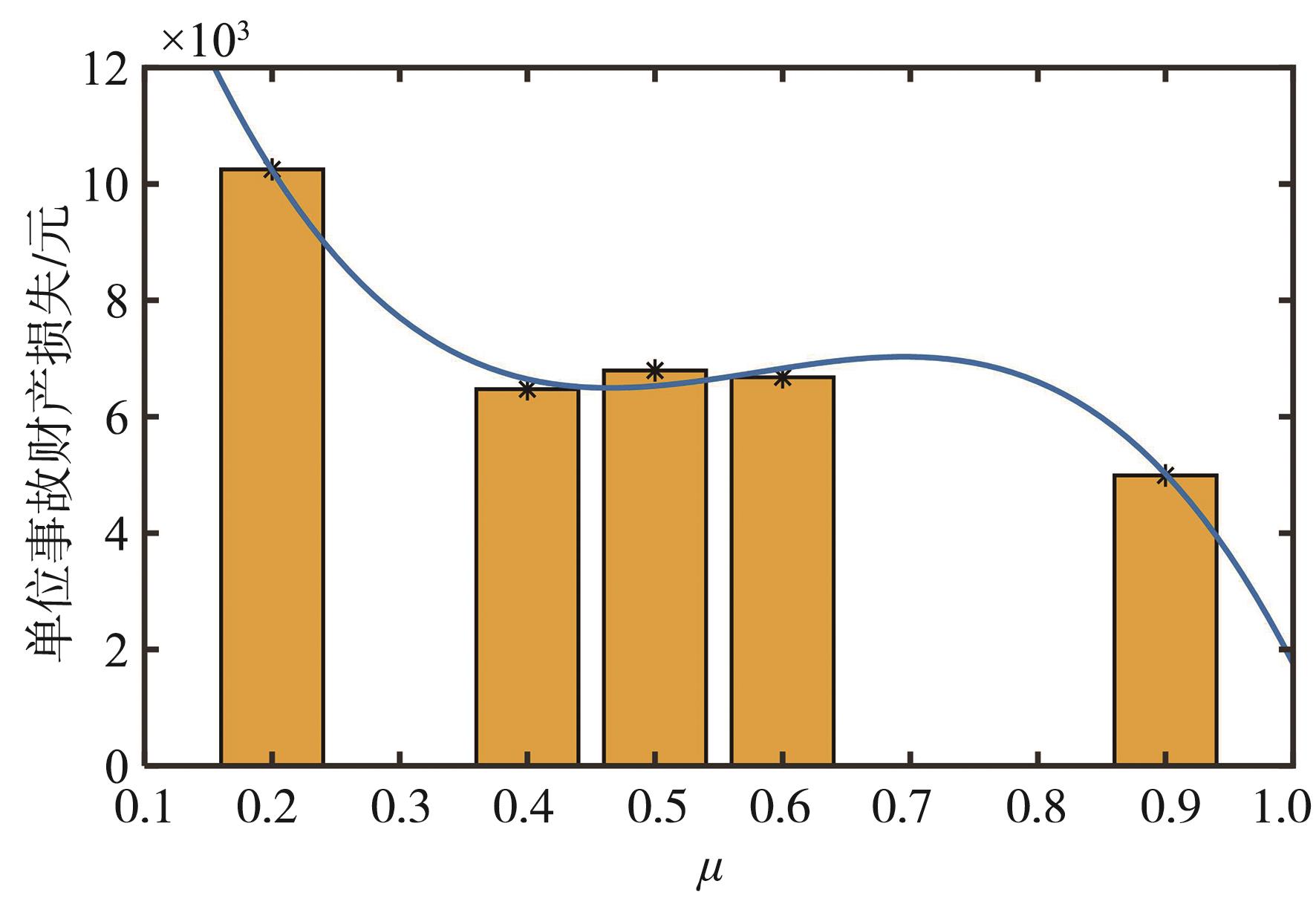
表9
不同年龄段驾驶员的风险标定值"
| 编号i | 驾驶员年龄DRi_p | ψ(DRi_p ) |
|---|---|---|
| 1 | 16-20岁 | 0.529 |
| 2 | 21-25岁 | 0.768 |
| 3 | 26-30岁 | 0.951 |
| 4 | 31-35岁 | 1.00 |
| 5 | 36-40岁 | 0.949 |
| 6 | 41-45岁 | 0.911 |
| 7 | 46-50岁 | 0.803 |
| 8 | 51-55岁 | 0.715 |
| 9 | 56-60岁 | 0.600 |
| 10 | 61-65岁 | 0.482 |
| 11 | 65岁以上 | 0.535 |
表10
不同受教育水平驾驶员的风险标定值"
| 编号i | 受教育水平DRi_c | ψ(DRi_c ) |
|---|---|---|
| 1 | 无 | 0.691 |
| 2 | 小学 | 0.448 |
| 3 | 中学 | 0.370 |
| 4 | 本科 | 1.000 |
| 5 | 本科及以上 | 0.788 |
表11
不同驾龄驾驶员的风险标定值"
| 编号i | 驾驶员驾龄DRi_s | ψ(DRi_s ) |
|---|---|---|
| 1 | 1年以下 | 0.601 |
| 2 | 2年 | 0.611 |
| 3 | 3年 | 0.684 |
| 4 | 4年 | 0.674 |
| 5 | 5年 | 0.667 |
| 6 | 6-10年 | 0.796 |
| 7 | 11-15年 | 0.922 |
| 8 | 16-20年 | 0.948 |
| 9 | 20年以上 | 1.000 |
表12
违法行为的标定值"
| 编号i | 违法行为DRi_v | ψ(DRi_v ) |
|---|---|---|
| 1 | 超速行驶 | 0.467 |
| 2 | 酒后驾驶 | 0.414 |
| 3 | 逆向行驶 | 0.431 |
| 4 | 疲劳驾驶 | 1.000 |
| 5 | 违法变道 | 0.416 |
| 6 | 违法超车 | 0.374 |
| 7 | 违法倒车 | 0.314 |
| 8 | 违法掉头 | 0.380 |
| 9 | 违法装载 | 0.528 |
| 10 | 违反交通信号 | 0.443 |
| 11 | 未按规定让行 | 0.374 |

图5
封闭场地测试的实验设备"


图6
AEB测试场景示意图"

表13
AEB测试场景的场景解释"
| 场景编号 | 场景解释 |
|---|---|
| ① | 目标车静止,自车速度50 km/h |
| ② | 目标车车速20 km/h,自车车速60 km/h,纵向偏置50% |
| ③ | 行人横穿,行人速度5 km/h,自车车速50 km/h |
| ④ | 自行车横穿,自行车速度5 km/h,自车车速50 km/h |
| ⑤ | 跟车距离12 m,跟车车速50 km/h,前车减速度2g |
| ⑥ | 目标车切入,目标车车速20 km/h,自车车速60 km/h |
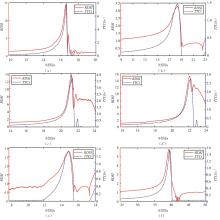
图7
6类AEB测试场景下RDSI和TTCi的对比"


图8
开放道路测试图"


图9
基于RDSI的SOTIF场景划分"

表14
开放道路实验的场景划分"
| 场景类别 | 场景编号 | 场景描述 | 风险值 |
|---|---|---|---|
| 已知安全 | ①、④、⑥ | ||
| 已知不安全 | |||
| 未知安全/不安全 | ② | 主车换道,目标车道前方3 m存在静止车 | 0.12 |
| ③ | 主车跟车距离1.5 m,跟车速度4 km/h | 0.04 | |
| ⑤ | 主车换道2 s后,前方5 m目标车进行换道 | 0.05 |
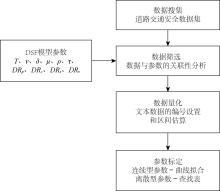
图B1
DSF模型参数标定流程图"

| 1 | Forbes. Tesla in Taiwan crashes directly into overturned truck, ignores pedestrian, with autopilot on [EB/OL]. Forbes, (2020-1-2)[2022-2-18].https://www.forbes.com/sites/bradtempleton/2020/06/02/tesla-in-taiwan-crashes-directly-into-overturned-truck-ignores-pedestrian-with-autopilot-on/. |
| 2 | MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 1821-1827. |
| 3 | WEBER H, BOCK J, KLIMKE J, et al. A framework for definition of logical scenarios for safety assurance of automated driving[J]. Traffic Injury Prevention, 2019, 20: S65-S70. |
| 4 | ZHAO D, GUO Y, JIA Y J. Trafficnet: an open naturalistic driving scenario library[C]. IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2017: 1-8. |
| 5 | ZHAO D, LAM H, PENG H, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(3): 595-607. |
| 6 | ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(3): 733-744. |
| 7 | XU Y, ZOU Y, SUN J. Accelerated testing for automated vehicles safety evaluation in cut-in scenarios based on importance sampling, genetic algorithm and simulation applications[J]. Journal of Intelligent and Connected Vehicles, 2018. |
| 8 | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part I: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(3): 1573-1582. |
| 9 | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part II: case studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(9): 5635-5647. |
| 10 | FENG S, FENG Y, YAN X, et al. Safety assessment of highly automated driving systems in test tracks: a new framework[J]. Accident Analysis & Prevention, 2020, 144: 105664. |
| 11 | FENG S, FENG Y, SUN H, et al. Testing scenario library generation for connected and automated vehicles: an adaptive framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 12 | FENG S, YAN X, SUN H, et al. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J]. Nature Communications, 2021, 12(1): 1-14. |
| 13 | ISO. Road vehicles safety of the intended functionality: ISO/PAS 21448: 2019[S]. Switzerland: ISO, 2018. |
| 14 | LI Y, LI K Q, ZHENG Y, et al. Threat assessment techniques in intelligent vehicles: a comparative survey[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 13(4): 71-91. |
| 15 | BOGENRIEDER R, FEHRING M, BACHMANN R. PRE-SAFE in rear-end collision situations[C]. Proceedings 21st International Technical Conferrence on the Enhanced Safety of Vehicles, Stuttgart, 2009. |
| 16 | LI Y, ZHENG Y, WANG J Q, et al. Crash probability estimation via quantifying driver hazard perception[J]. Accident Analysis & Prevention, 2018, 116: 116-125. |
| 17 | WINSUM W V, HEINO A. Choice of time-headway in car-following and the role of time-to-collision information in braking[J]. Ergonomics, 1996, 39(4): 579-592. |
| 18 | WANG J Q, WU J, LI Y. The driving safety field based on driver-vehicle-road interactions[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. |
| 19 | WANG J Q, WU J, ZHENG X, et al. Driving safety field theory modeling and its application in pre-collision warning system [J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306-324. |
| 20 | LI Y, WANG J Q, WU J. Model calibration concerning risk coefficients of driving safety field model[J]. Journal of Central South University, 2017, 24(6): 1494-1502. |
| 21 | LI M J, SONG X L, CAO H T, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. |
| 22 | WU R F, ZHENG X J, XU Y N, et al. Modified driving safety field based on trajectory prediction model for pedestrian–vehicle collision[J]. Sustainability, 2019, 11(22): 6254. |
| 23 | GONZÁLEZ D, PÉREZ J, MILANÉS V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1135-1145. |
| 24 | RAKSINCHAROENSAK P, HASEGAWA T, NAGAI M. Motion planning and control of autonomous driving intelligence system based on risk potential optimization framework[J]. International Journal of Automotive Engineering, 2016, 7(AVEC14): 53-60. |
| 25 | RASEKHIPOUR Y, KHAJEPOUR A, CHEN S K, et al. A potential field-based model predictive path-planning controller for autonomous road vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(5): 1255-1267. |
| 26 | BOUNINI F, GINGRAS D, POLLART H, et al. Modified artificial potential field method for online path planning applications[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017: 180-185. |
| 27 | ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving[C]. IEEE 18th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2015: 982-988. |
| 28 | WU S Y, WANG H, YU W H, et al. A new SOTIF scenario hierarchy and its critical test case generation based on potential risk assessment[C]. 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI). IEEE, 2021: 399-409. |
| 29 | 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆换道模型[J]. 中国公路学报, 2021, 34(6): 184-195. |
| LI L H, GAN J, QU X, et al. Lane-changing model based on safety potential field theory under the connected and automated vehicles environment[J]. China Journal of Highway and Transport, 2021, 34(6): 184-195. | |
| 30 | 中国公安部交通运输局. 2010-2016年中华人民共和国道路交通事故统计年报[G]. 北京, 2017. |
| Transportation Bureau of the Ministry of Public Security of the PRC. 2010-2016 annals of road traffic accidents statistics of the People’s Republic of China[G]. Beijing, 2017. |
| [1] | 杨彪, 韦智文, 倪蓉蓉, 王海, 蔡英凤, 杨长春. 基于动作条件交互的高效行人过街意图预测[J]. 汽车工程, 2024, 46(1): 29-38. |
| [2] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [3] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [4] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [5] | 白先旭,左瑜,李维汉,石琴,李楚照,赵树廉,陈炯. 自动紧急制动系统控制模块的SOTIF量化评价[J]. 汽车工程, 2023, 45(9): 1655-1665. |
| [6] | 李达,邓钧君,张照生,刘鹏,王震坡. 电动车辆动力电池安全预警策略研究综述[J]. 汽车工程, 2023, 45(8): 1392-1407. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 胡林,李根,王方,林淼,巫宁. 基于CIDAS事故数据的路口乘用车-两轮车测试场景研究[J]. 汽车工程, 2023, 45(8): 1417-1427. |
| [9] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [10] | 邹铁方,刘前程,魏亮. 加装传统AEB后的未避免事故典型碰撞场景与事故特征[J]. 汽车工程, 2023, 45(6): 1062-1072. |
| [11] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [12] | 韩勇,袁小宾,卢明,谈笑天. 汽车与电动两轮车碰撞典型场景下的AEB纵横向触发策略研究[J]. 汽车工程, 2023, 45(3): 501-509. |
| [13] | 崔格格,吕超,李景行,张哲雨,熊光明,龚建伟. 数据驱动的智能车个性化场景风险图构建[J]. 汽车工程, 2023, 45(2): 231-242. |
| [14] | 李捷,吴晓东,许敏,刘永刚. 基于强化学习的城市场景多目标生态驾驶策略[J]. 汽车工程, 2023, 45(10): 1791-1802. |
| [15] | 赵树廉,来飞,李克强,陈涛,孟璋劼,唐逸超,吴思宇,田浩东. 基于数字孪生技术的智能汽车测试方法研究[J]. 汽车工程, 2023, 45(1): 42-51. |
|