汽车工程 ›› 2024, Vol. 46 ›› Issue (11): 2017-2027.doi: 10.19562/j.chinasae.qcgc.2024.11.008
陈志军1,2,王朝伟1,2,吴超仲1,3,4( ),钱闯1,吴怀主5,申广俊5
),钱闯1,吴怀主5,申广俊5
收稿日期:2024-06-07
修回日期:2024-07-09
出版日期:2024-11-25
发布日期:2024-11-22
通讯作者:
吴超仲
E-mail:wucz@whut.edu.cn
基金资助:
Zhijun Chen1,2,Chaowei Wang1,2,Chaozhong Wu1,3,4(),Chuang Qian1,Huaizhu Wu5,Guangjun Shen5
Received:2024-06-07
Revised:2024-07-09
Online:2024-11-25
Published:2024-11-22
Contact:
Chaozhong Wu
E-mail:wucz@whut.edu.cn
摘要:
地下矿道可行驶区域检测是地下矿山自动驾驶系统的关键感知技术,然而地下矿道光照强度低、工况复杂的特点给该任务带来极大挑战。鉴于此,本文提出一种地下矿道可行驶区域检测算法。首先,为解决地下矿道细节退化导致图像特征难以提取的问题,提出一种双分支特征提取骨干网络;然后,针对地下矿道可行驶区域检测不完整问题,提出一种自适应多尺度空间空洞池化金字塔特征增强模块;最后,为解决地下矿道边界提取不准确的问题,设计一种双分支通道注意力机制融合模块。在自制矿道可行驶区域数据集上进行实验,相较于Deeplabv3+、UNet、DDRNet-23、PIDNet,本文算法取得最佳效果,在MIoU分数上分别提升2.07、2.39、1.87、1.92个百分点,在mAcc分数上分别提升1.78、2.45、1.84、1.86。本文算法已成功应用于地下无人驾驶矿车,验证了其在真实矿道场景下的有效性。
陈志军,王朝伟,吴超仲,钱闯,吴怀主,申广俊. 地下矿道无人车可行驶区域检测算法[J]. 汽车工程, 2024, 46(11): 2017-2027.
Zhijun Chen,Chaowei Wang,Chaozhong Wu,Chuang Qian,Huaizhu Wu,Guangjun Shen. Algorithm for Detecting Free Space in Underground Mine Tunnels for Autonomous Vehicles[J]. Automotive Engineering, 2024, 46(11): 2017-2027.

图1
DDMNet框架图注: 图中的DBFAM均属于特征融合模块,为使流程图看起来清晰,故未将所有DBFAM放入特征融合模块所在红色方框。"

表1
MDFNet结构参数"
| 层名 | 输出特征图尺寸(H×W×C) | 网络层主要结构 | ||
|---|---|---|---|---|
| L1 | 128×128×128 | Inverted Residual Block×1,stride=2 | ||
| L2 | 64×64×256 | Inverted Residual Block×1,stride=2 | ||
| L3 | 32×32×64 | Inverted Residual Block×4 | ||
| L4 | 16×16×128 | 32×32×64 | bottleneck block×2 | 大核bottleneck block×2 |
| DBFAM | DBFAM模块×1 | |||
| L5 | 8×8×256 | 32×32×96 | bottleneck block×2 | 大核bottleneck block×2 |
| DBFAM | DBFAM模块×1 | |||
| L6 | 4×4×384 | 32×32×128 | bottleneck block×2 | bottleneck block×2 |
| SAPPM-L | SAPPM-H | SAPPM-L×1 | SAPPM-H×1 | |
| DBFAM | DBFAM | |||

图2
MDFNet基本模块"


图3
可行驶区域检测常见问题"
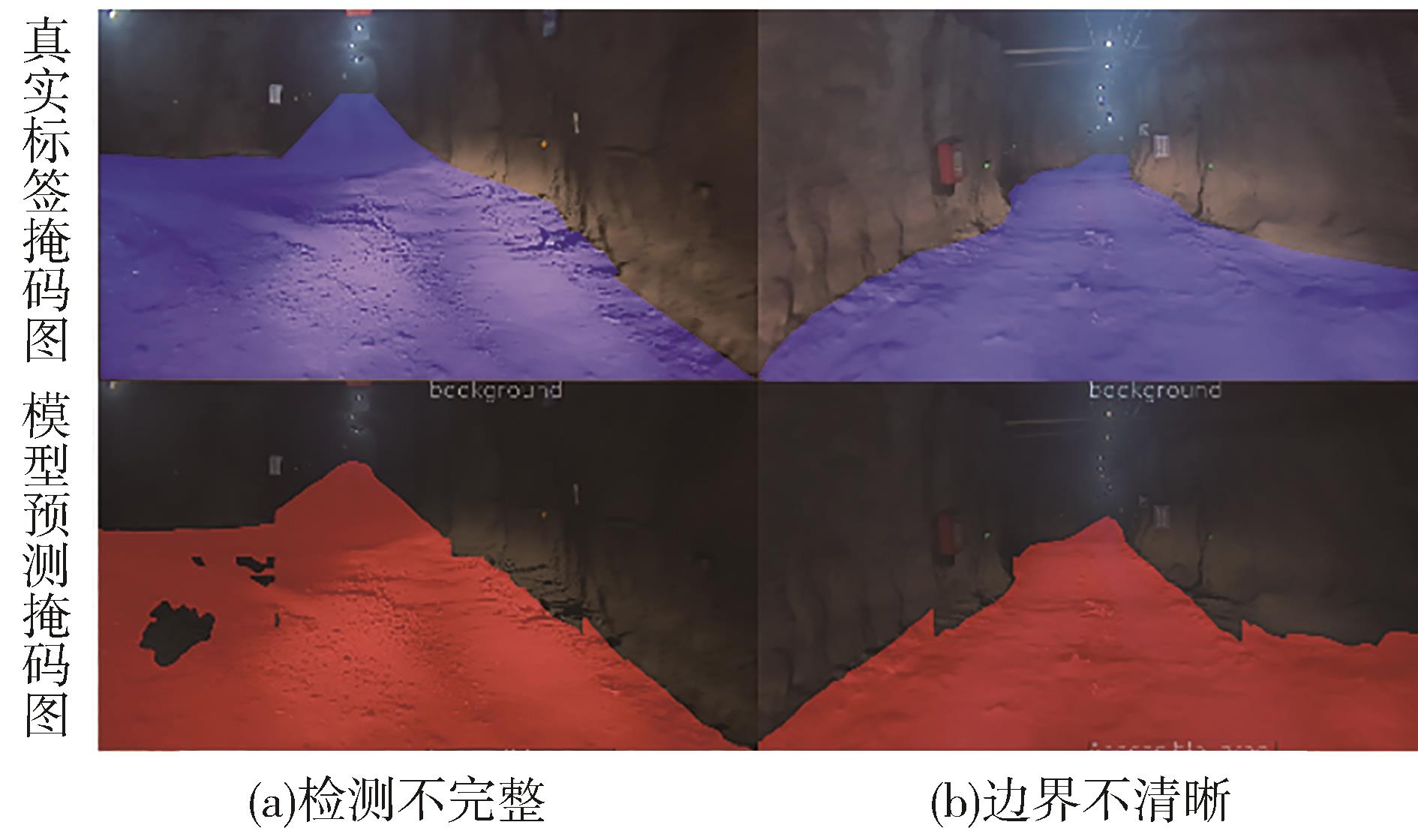

图4
SAPPM结构图"

表2
SAPPM详细结构"
| 方法 | 池化核大小 | 填充 | 步长 |
|---|---|---|---|
| SAPPM-L | [1,1,3,5,global] | [0,1,2,4,0] | [1,1,2,4,global] |
| SAPPM-H | [1,5,9,13,global] | [0,2,4,6,0] | [1,1,2,4,global] |

图5
DBFAM结构图"


图6
通道注意力结构图"


图7
分割头设计"


图8
数据采集所采用的无人实验车"


图9
矿道可行驶区域数据集困难版本"


图10
矿道可行驶区域数据集常规版本"

表3
常规环境下不同模型精度对比 (%)"
| 方法 | MIoU(normal) | mAcc(normal) |
|---|---|---|
| SegNet | 87.31 | 89.65 |
| Fast-scnn | 93.21 | 95.65 |
| Deeplabv3+-r18+ FCN | 93.97 | 96.26 |
| Deeplabv3+-50+ FCN | 94.03 | 96.31 |
| MobileNetv3+ASPP | 93.57 | 95.89 |
| UNet + FCN | 93.71 | 95.66 |
| DDRNet-23 | 94.23 | 96.25 |
| PIDNet-S | 94.18 | 96.23 |
| DDMNet(ours) | 96.10 | 98.09 |

图11
常规环境下不同模型输出可视化结果"

表4
极端环境下不同模型分割精度 (%)"
| 方法 | MIoU(hard) | mAcc(hard) |
|---|---|---|
| SegNet | 82.11 | 84.81 |
| Fast-scnn | 86.41 | 89.23 |
| Deeplabv3+-r18+ FCN | 89.88 | 91.86 |
| Deeplabv3+-50+ FCN | 90.83 | 92.15 |
| MobileNetv3+ASPP | 89.14 | 91.29 |
| UNet + FCN | 89.67 | 91.85 |
| DDRNet-23 | 91.32 | 93.10 |
| PIDNet-S | 91.04 | 93.14 |
| DDMNet(ours) | 93.30 | 95.22 |

图12
常规版本测试集和困难版本分割可视化结果"
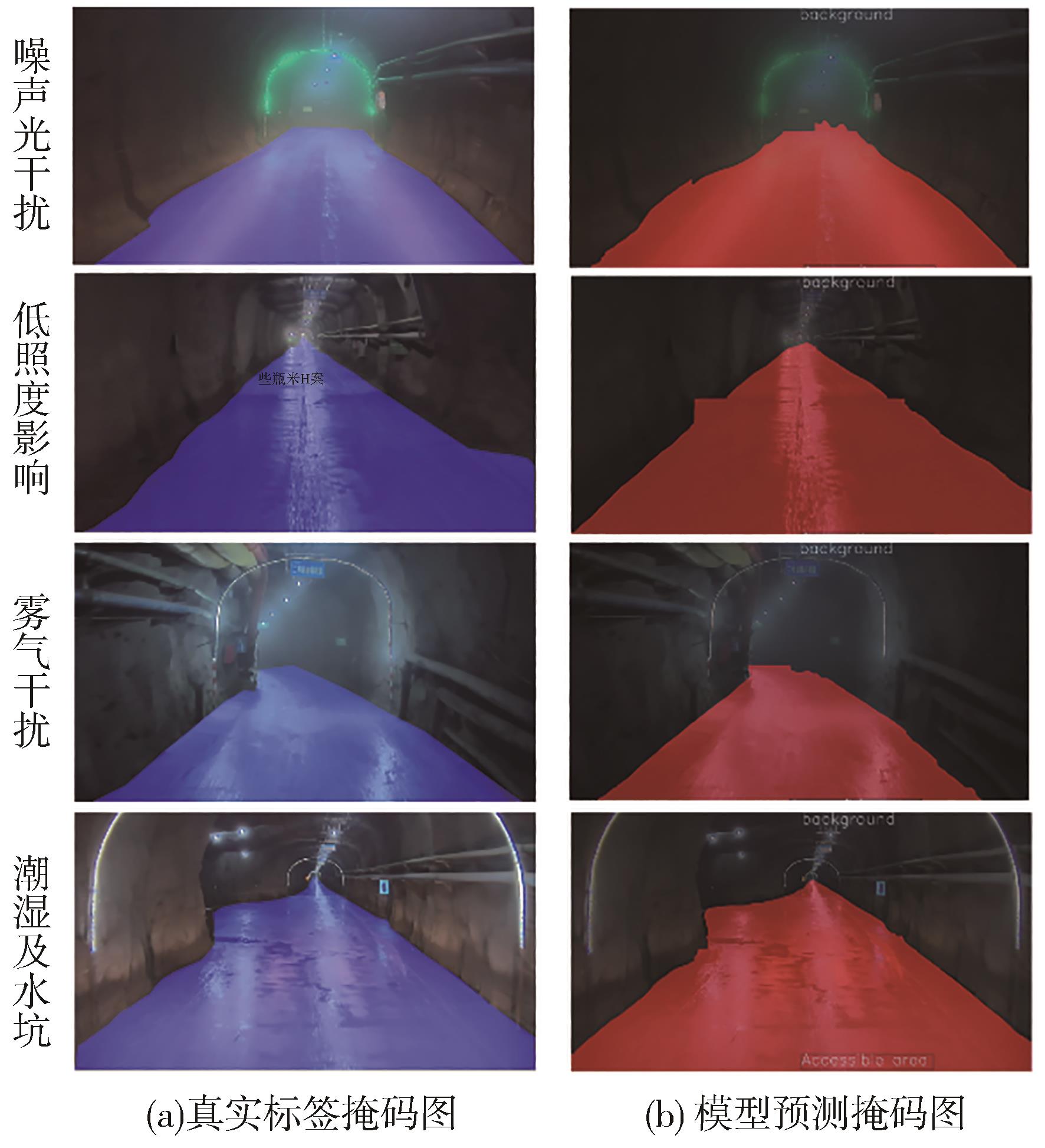
表5
不同工况下的分割精度 (%)"
| 工况 | MIoU(hard) | mAcc(hard) |
|---|---|---|
| 长直道 | 96.94 | 98.64 |
| 弯道 | 95.68 | 97.74 |
| 斜坡 | 96.17 | 96.21 |
| 会车区域 | 95.30 | 95.42 |
| 上料卸料区 | 93.78 | 94.83 |

图13
不同工况下模型输出可视化结果"

表6
模型推理性能对比结果"
| 方法 | Float | Param | FPS |
|---|---|---|---|
| SegNet | 2.860G | 29.5M | 4.22 |
| Fast-scnn | 0.232G | 1.4M | 11.84 |
| Deeplabv3+-r18+ FCN | 13.565G | 12.3M | 10.71 |
| Deeplabv3+-50+ FCN | 44.121G | 41.2M | 5.39 |
| MobileNetv3+ASPP | 3.487G | 4.4M | 14.67 |
| UNet + FCN | 50.738G | 30.0M | 9.33 |
| DDRNet-23 | 1.14G | 20.1M | 11.72 |
| PIDNet-S | 1.821G | 7.6M | 8.08 |
| DDMNet(ours) | 1.731G | 14.6M | 12.24 |
表7
消融实验结果"
| 实验方法 | MDFNet | SAPPM | DBFAM | MIoU/% | FPS |
|---|---|---|---|---|---|
| DDRNet | 94.23 | 11.72 | |||
| MDFNet | √ | 95.35 | 12.40 | ||
| MDFNet+SAPPM | √ | √ | 95.70 | 12.32 | |
| MDFNet+DBFAM | √ | √ | 95.59 | 12.20 | |
| MDFNet+SAPPM+DBFAM | √ | √ | √ | 96.10 | 12.24 |

图14
实车验证效果图"


图15
实车验证效果图"

| 1 | LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2015: 3431-3440. |
| 2 | RONNEBERGER O, FISCHER P, BROX T. U-net: convolutional networks for biomedical image segmentation[C]. Medical Image Computing and Computer-Assisted Intervention-MICCAI 2015: 18th International Conference, Munich, Germany, October 5-9, 2015, proceedings, part III 18. Springer International Publishing, 2015: 234-241. |
| 3 | ZHOU Z, RAHMAN SIDDIQUEE M M, TAJBAKHSH N, et al. Unet++: a nested u-net architecture for medical image segmentation[C]. Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support: 4th International Workshop, DLMIA 2018, and 8th International Workshop, ML-CDS 2018, Held in Conjunction with MICCAI 2018, Granada, Spain, September 20, 2018, Proceedings 4. Springer International Publishing, 2018: 3-11. |
| 4 | HUANG H, LIN L, TONG R, et al. UNet 3+: a full-scale connected uNet for medical image segmentation[C]. ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE, 2020: 1055-1059. |
| 5 | POUDEL R P K, LIWICKI S, CIPOLLA R. Fast-SCNN: fast semantic segmentation network[J]. arXiv preprint arXiv:, 2019. |
| 6 | CHEN L C, PAPANDREOU G, KOKKINOS I, et al. Semantic image segmentation with deep convolutional nets and fully connected crfs[J]. arXiv preprint arXiv:, 2014. |
| 7 | CHEN L C, PAPANDREOU G, KOKKINOS I, et al. DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 40(4): 834-848. |
| 8 | CHEN L C, PAPANDREOU G, SCHROFF F, et al. Rethinking atrous convolution for semantic image segmentation[J]. arXiv preprint arXiv:, 2017. |
| 9 | CHEN L C, ZHU Y, PAPANDREOU G, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]. Proceedings of the European Conference on Computer Vision (ECCV), 2018: 801-818. |
| 10 | ZHAO H, SHI J, QI X, et al. Pyramid scene parsing network[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2881-2890. |
| 11 | STRUDEL R, GARCIA R, LAPTEV I, et al. Segmenter: transformer for semantic segmentation[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 7262-7272. |
| 12 | CHENG B, MISRA I, SCHWING A G, et al. Masked-attention mask transformer for universal image segmentation[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 1290-1299. |
| 13 | ZHAO W, RAO Y, LIU Z, et al. Unleashing text-to-image diffusion models for visual perception[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023: 5729-5739. |
| 14 | PASZKE A, CHAURASIA A, KIM S, et al. ENet: a deep neural network architecture for real-time semantic segmentation[J]. arXiv preprint arXiv:, 2016. |
| 15 | HOWARD A G, ZHU M, CHEN B, et al. MobileNets: efficient convolutional neural networks for mobile vision applications[J]. arXiv preprint arXiv:, 2017. |
| 16 | SANDLER M, HOWARD A, ZHU M, et al. MobileNetV2: inverted residuals and linear bottlenecks[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 4510-4520. |
| 17 | HOWARD A, SANDLER M, CHU G, et al. Searching for mobileNetV3[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 1314-1324. |
| 18 | GAMAL M, SIAM M, ABDEL-RAZEK M. ShuffleSeg: real-time semantic segmentation network[J]. arXiv preprint arXiv:, 2018. |
| 19 | ZHANG X, ZHOU X, LIN M, et al. ShuffleNet: an extremely efficient convolutional neural network for mobile devices[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 6848-6856. |
| 20 | MA N, ZHANG X, ZHENG H T, et al. ShuffleNet V2: practical guidelines for efficient CNN architecture design[C]. Proceedings of the European Conference on Computer Vision (ECCV), 2018: 116-131. |
| 21 | YU C, WANG J, PENG C, et al. BiseNet: bilateral segmentation network for real-time semantic segmentation[C]. Proceedings of the European Conference on Computer Vision (ECCV), 2018: 325-341. |
| 22 | PAN H, HONG Y, SUN W, et al. Deep dual-resolution networks for real-time and accurate semantic segmentation of traffic scenes[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(3): 3448-3460. |
| 23 | XU J, XIONG Z, BHATTACHARYYA S P. PIDNet: a real-time semantic segmentation network inspired by PID controllers[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 19529-19539. |
| 24 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 25 | HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. |
| 26 | HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 7132-7141. |
| 27 | SHRIVASTAVA A, GUPTA A, GIRSHICK R. Training region-based object detectors with online hard example mining[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 761-769. |
| [1] | 李道飞,潘豪. 场景复杂度评估在轨迹预测和驾驶决策中的应用[J]. 汽车工程, 2024, 46(9): 1556-1563. |
| [2] | 朱冰,范天昕,赵健,张培兴,宋东鉴,薛越,赵文博. 自动驾驶拟人连续交互测试场景生成方法[J]. 汽车工程, 2024, 46(9): 1600-1607. |
| [3] | 张国娟,胡宏宇,李浩淼,王明剑,高菲,高镇海. 自动驾驶车辆乘坐舒适性评价研究综述[J]. 汽车工程, 2024, 46(9): 1617-1627. |
| [4] | 张佳楠,胡钊政,孟杰,胡华桦,左洁. 面向车-路-图协同的分布式自动驾驶仿真平台架构及应用[J]. 汽车工程, 2024, 46(8): 1335-1345. |
| [5] | 颜伏伍,向博文,胡杰,陈锐鹏,张志豪,刘昊岩,高宠智. 基于改进LPV模型的自动驾驶轻型货车横向控制[J]. 汽车工程, 2024, 46(8): 1403-1413. |
| [6] | 陶乐,王海,蔡英凤,陈龙. 面向自动驾驶场景的多目标点云检测算法[J]. 汽车工程, 2024, 46(7): 1208-1218. |
| [7] | 李琳辉,付一帆,王霆,王雪成,连静. 引入自监督预训练的轨迹预测方法[J]. 汽车工程, 2024, 46(7): 1219-1227. |
| [8] | 王海,张桂荣,罗彤,邱梦,蔡英凤,陈龙. 面向自动驾驶道路场景中异常案例的多模态数据挖掘算法[J]. 汽车工程, 2024, 46(7): 1239-1248. |
| [9] | 王海,丁玉轩,罗彤,邱梦,蔡英凤,陈龙. 驾驶场景下结合运动速度以及外观特征的多类多目标跟踪方法[J]. 汽车工程, 2024, 46(6): 956-964. |
| [10] | 黄晶,刘祥臻,邓潇阳,陈然. 基于多模态轨迹预测的智能车轨迹规划研究[J]. 汽车工程, 2024, 46(6): 965-974. |
| [11] | 王国栋,刘立,孟宇,杜海平,白国星,顾青. 自动驾驶汽车避撞极限研究[J]. 汽车工程, 2024, 46(6): 985-994. |
| [12] | 李梦凡,冯忠祥,张卫华,李靖宇. 面向人机共驾模式下驾驶人接管过程的视觉转移特性研究[J]. 汽车工程, 2024, 46(5): 795-804. |
| [13] | 姚福星,孙超,兰云港,卢兵,王博,于海洋. 基于混合专家模型的智能网联汽车换道决策方法[J]. 汽车工程, 2024, 46(5): 882-892. |
| [14] | 杜国栋,邹渊,张旭东,孙文景,孙巍. 基于双估计强化学习结合前向预测控制的自动驾驶运动控制研究[J]. 汽车工程, 2024, 46(4): 564-576. |
| [15] | 丁志杰,王亚飞,章翼辰,邬明宇,王亦乐. 基于复合动态采样的自动驾驶矿车节能路径规划方法[J]. 汽车工程, 2024, 46(4): 588-595. |
|