Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (10): 1484-1493.doi: 10.19562/j.chinasae.qcgc.2022.10.002
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Shaobo Lu1,2( ),Feifei Xie1,Bohan Zhang1,Jiafeng Lu1,Caixia Li1
),Feifei Xie1,Bohan Zhang1,Jiafeng Lu1,Caixia Li1
Received:2022-04-20
Revised:2022-05-15
Online:2022-10-25
Published:2022-10-21
Contact:
Shaobo Lu
E-mail:lsb@cqu.edu.cn
Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields[J].Automotive Engineering, 2022, 44(10): 1484-1493.

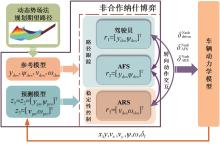
"
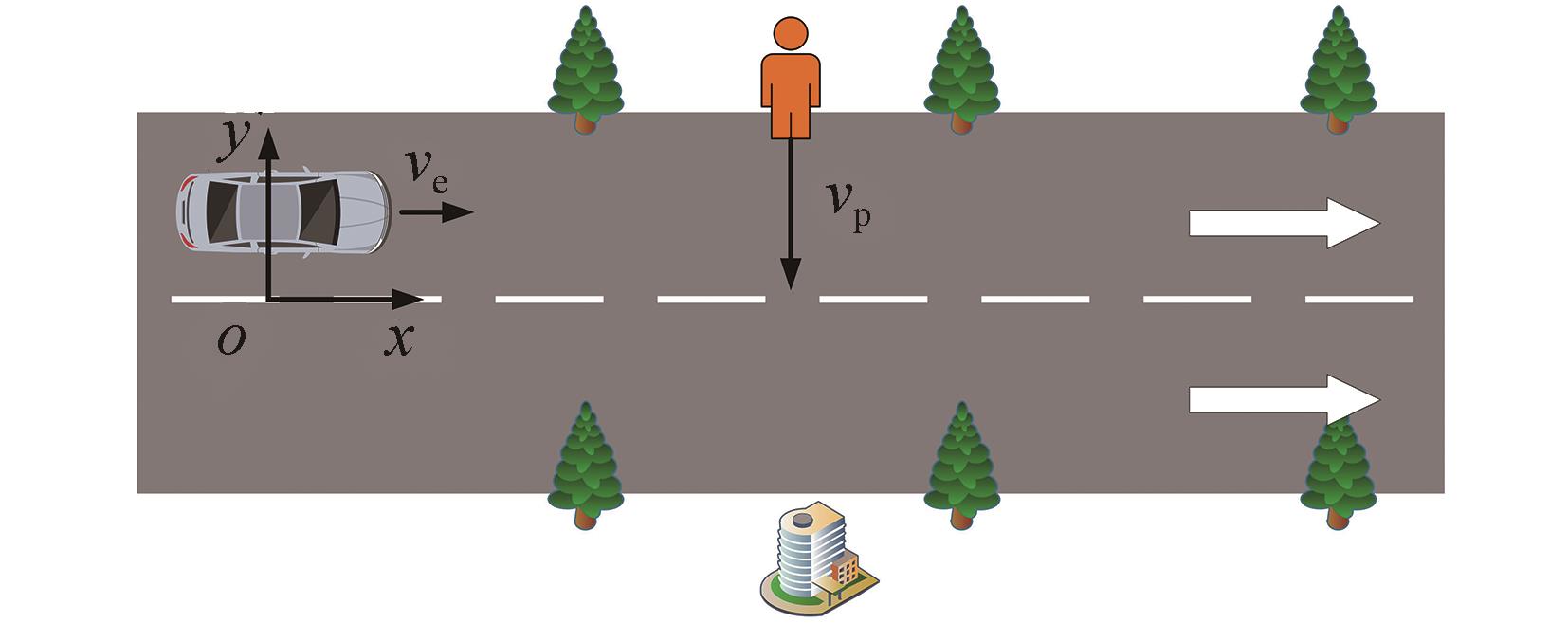
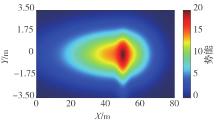
"
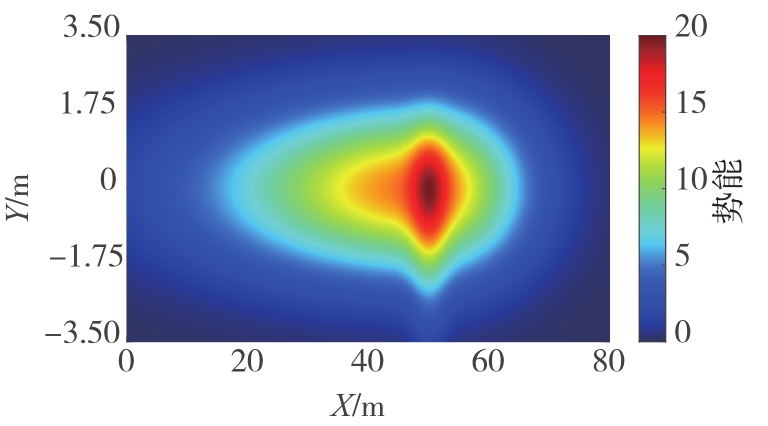
"
"
"
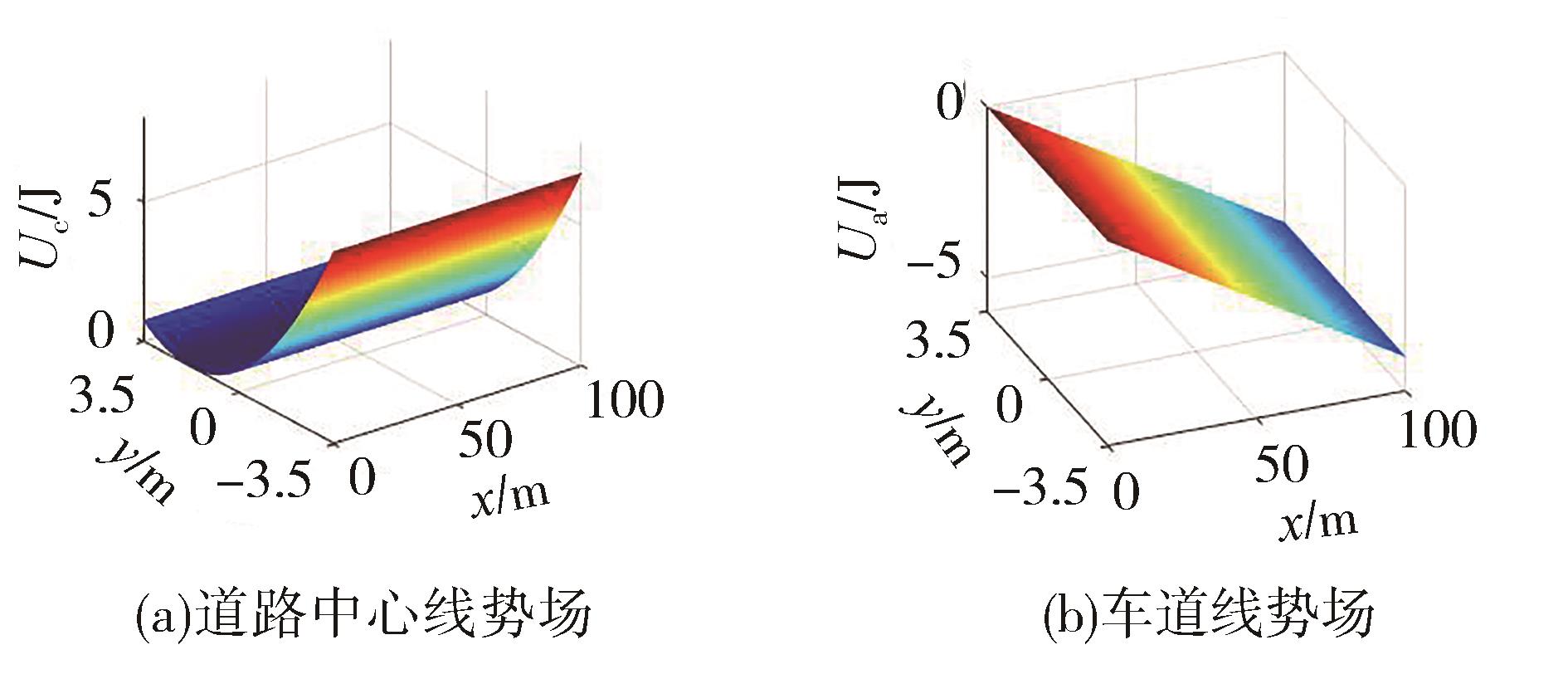
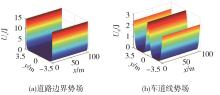
| 势场 | 变量名 | 数值 |
|---|---|---|
| 行人势场 | kp1 kp2 kp3 | 15 5 1 |
| 道路中心线势场 | Kc | 0.05 |
| 方向引力势场 | Ka | 1 |
| 道路边界势场 | Ke | 0.1 |
| 车道线势场 | Kl | 4 |
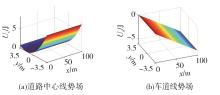
"
"

"
"
"
| 变量 | 数值 |
|---|---|
| 整车质量m /kg | 1 412 |
| 车辆绕z轴转动惯量Iz /(kg·m2) | 1 536 |
| 前轮侧偏刚度Cf/(N·rad-1) | -114 592 |
| 后轮侧偏刚度Cr/(N·rad-1) | -114 592 |
| 质心到前轴距离la/m | 1.015 |
| 质心到后轴距离lb/m | 1.895 |
| 车辆前轴长度tf/m | 1.675 |
| 车辆后轴长度tr/m | 1.675 |

"
"
"
"

"

"
"
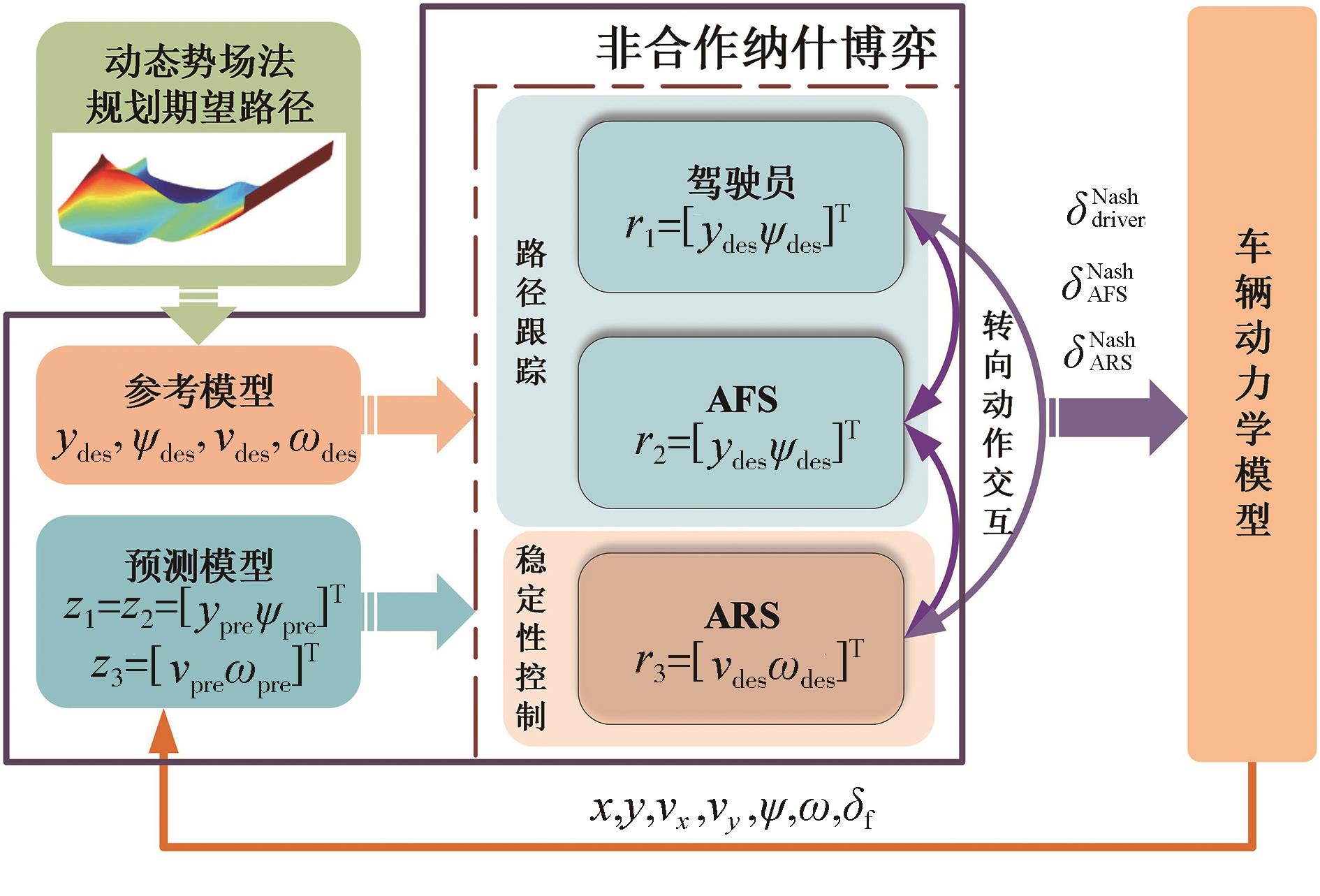
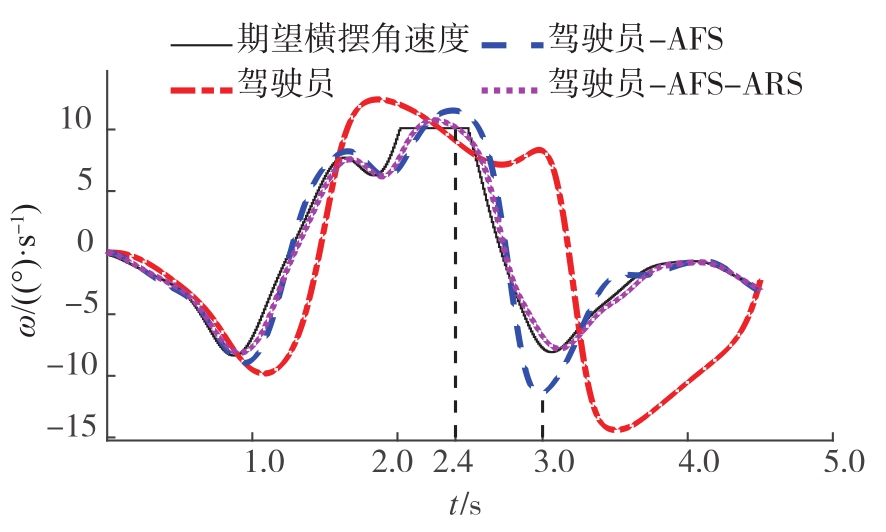
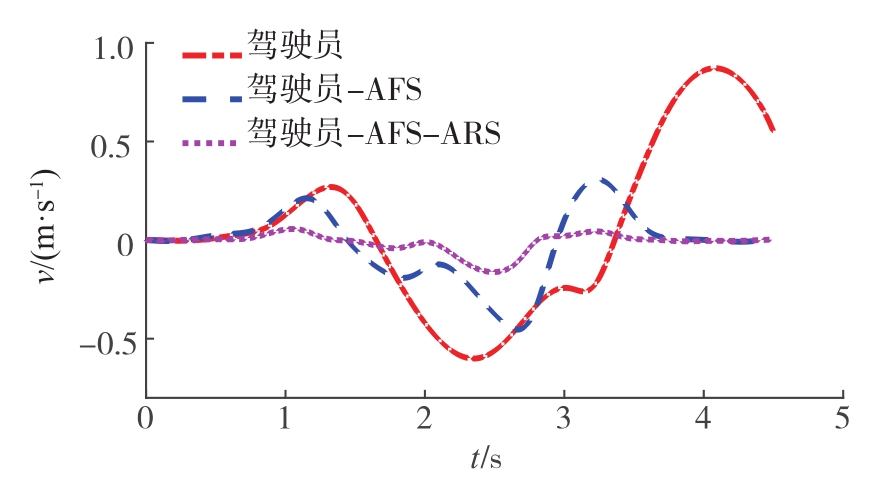
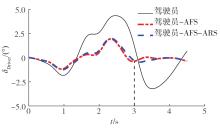
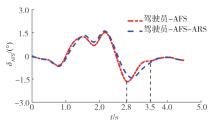
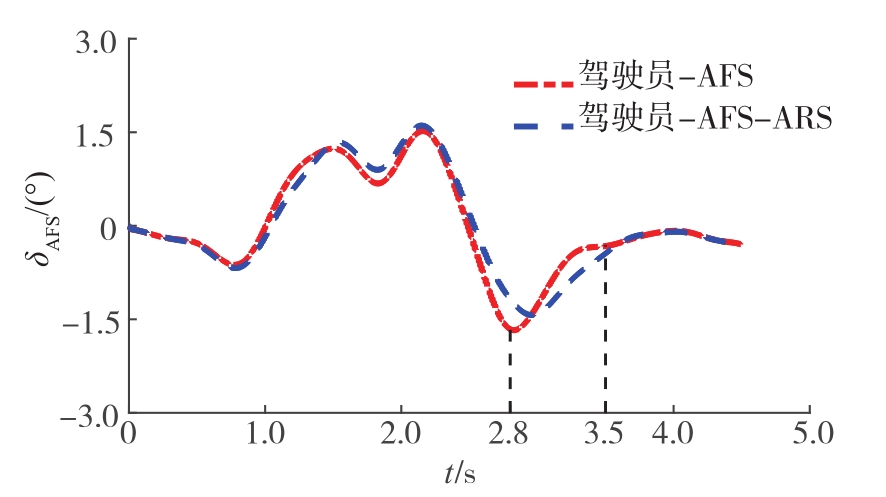
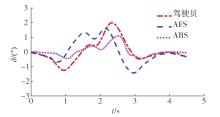
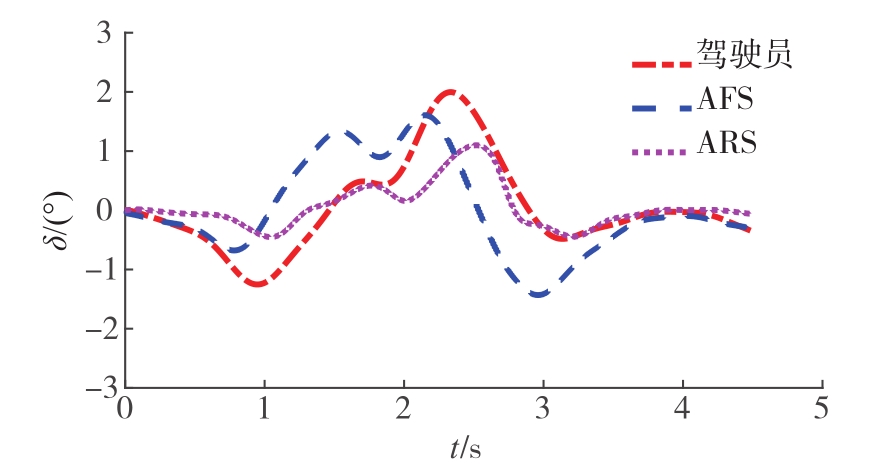
| 项目 | Ye/m | ψe/(o) | ωe/((o)·s-1) | ve/(m·s-1) |
|---|---|---|---|---|
| 驾驶员-AFS | 0.023 2 | 0.030 | 0.083 5 | 0.022 4 |
驾驶员- AFS-ARS | 0.020 8 | 0.028 | 0.076 8 | 0.012 0 |
| 改善率 | 10.34% | 6.67% | 8.02% | 46.43% |
"
| 1 | World Health Organization. Global status report on road safety 2018: summary[R], 2018. |
| 2 | YUE L, ABDEL-ATY M, WU Y, et al. Effects of forward collision warning technology in different pre-crash scenarios[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 76: 336-352. |
| 3 | ZENG J, YU Y, DING X, et al. AEB-pedestrian protection model simulation and real vehicle application[C]. Sixth International Conference on Electromechanical Control Technology and Transportation. SPIE, 2022, 12081: 873-882. |
| 4 | CHRISTER A, MARIA G L, MATS N, et al. The effect of an active steering system on city bus drivers’ muscle activity[J]. International Journal of Occupational Safety and Ergonomics, 2019, 25(3): 377-385. |
| 5 | MARCANO M, SERGIO D, JOSHUé P, et al. A review of shared control for automated vehicles: theory and applications[J]. IEEE Transactions on Human-Machine Systems, 2020, 50(6): 475-491. |
| 6 | XING Y, LV C, CAO D, et al. Toward human-vehicle collaboration: review and perspectives on human-centered collaborative automated driving[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103199. |
| 7 | WANG W, NA X, CAO D, et al. Decision-making in driver-automation shared control: a review and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. |
| 8 | NA X, COLE D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2014, 45(1): 25-38. |
| 9 | JI X, LIU Y, NA X, et al. Research on interactive steering control strategy between driver and AFS in different game equilibrium strategies and information patterns[J]. Vehicle System Dynamics, 2018, 56(9): 1344-1374. |
| 10 | KO S, LANGARI R. Shared control between human driver and machine based on game theoretical model predictive control framework[C]. IEEE ASME International Conference on Advanced Intelligent Mechatronics, 2020: 649-654. |
| 11 | LI M, SONG X, CAO H, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. |
| 12 | ZHANG B, LU S, XIE F, et al. Stochastic cooperative game-based assistant fault-tolerant control considering driver behavior uncertainty[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2):2595-2607. |
| 13 | ZHANG Z, ZHANG H, ZHAO W. A human-vehicle game stability control strategy considering drivers’ steering characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(11): 7306-7316. |
| 14 | 安林芳, 陈涛, 成艾国, 等. 基于人工势场算法的智能车辆路径规划仿真[J]. 汽车工程, 2017, 39(12):1451-1456. |
| AN L F, CHEN T, CHENG A G, et al. Study on the simulation of autonomous vehicle path planning based on artificial potential field algorithm[J]. Autonomous Engineering, 2017, 39(12):1451-1456. | |
| 15 | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG J Q, WU J, LI Y. Study on the concept, principle and modeling of driving risk field based on human-vehicle-road coordination[J]. Chinese Journal of Highways, 2016, 29(1): 105-114. | |
| 16 | 李亚勇, 蔡英凤, 陈龙, 等. 考虑前后方车辆行驶状态的ACC系统控制方法[J]. 汽车工程, 2019, 41(8): 865-871. |
| LI Y Y, CAI Y F, CHEN L, at al. ACC system control method considering the driving state of front and rear vehicles[J]. Automotive Engineering, 2019, 41(8): 865-871. | |
| 17 | HONGYU H U, CHI Z, YUHUAN S, et al. An improved artificial potential field model considering vehicle velocity for autonomous driving[J]. IFAC-PapersOnLine, 2018, 51(31): 863-867. |
| 18 | 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6): 174-182. |
| TANG Z R, JI J, WU M Y, et al.Study on vehicle path planning and tracking based on improved artificial potential field method[J]. Journal of Southwest University (Natural Science Edition) , 2018, 40(6): 174-182. | |
| 19 | WAHID N, ZAMZURI H, RAHMAN M A A, et al. Study on potential field based motion planning and control for automated vehicle collision avoidance systems[C]. IEEE International Conference on Mechatronics, 2017: 208-213. |
| 20 | MICHAEL T, JOEL W. Artificial potential functions for highway driving with collision avoidance[C]. IEEE International Conference on Robotics and Automation, 2008: 3731-3736. |
| 21 | 李彩霞, 卢少波, 张博涵,等. 基于行人位置预测的人车转向避撞路径规划[J]. 汽车工程, 2021, 43(6):877-884. |
| LI C X, LU S B, ZHANG B H, et al. Study on collision avoidance path planning for pedestrians and vehicles based on pedestrian position prediction[J]. Automotive Engineering, 2021, 43(6): 877-884. | |
| 22 | KIM N, COLE D J. A model of driver steering control incorporating the driver’s sensing of steering torque[J]. Vehicle System Dynamics, 2011, 49(10): 1575-1596. |
| 23 | NA X, COLE D J. Linear quadratic game and non-cooperative predictive methods for potential application to modelling driver–AFS interactive steering control[J]. Vehicle System Dynamics, 2013, 51(2): 165-198. |
| [1] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [2] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [3] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [4] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [5] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |
| [6] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
| [7] | Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay [J]. Automotive Engineering, 2022, 44(9): 1359-1371. |
| [8] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |
| [9] | Daofei Li,Anfei Zha,Biao Xu,Jiajie Zhang. Trajectory Tracking Control Algorithm of Emergency Collision Avoidance for Tractor Semi-trailer Combination [J]. Automotive Engineering, 2022, 44(7): 1098-1106. |
| [10] | Sensen Cong,Feng Gao,Shucai Xu. Cooperative Control of Vehicle Lateral and Longitudinal Stability Based on Dynamic Stability Region [J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [11] | Peijun Fang,Yingfeng Cai,Long Chen,Yubo Lian,Hai Wang,Yilin Zhong,Xiaoqiang Sun. Trajectory Tracking Control Method Based on Vehicle Dynamics Hybrid Model for Intelligent Vehicle [J]. Automotive Engineering, 2022, 44(10): 1469-1483. |
| [12] | Hongwei Wang,Chenyu Liu,Lei Li,Haotian Zhang. Research on Trajectory Tracking Control of Unmanned Vehicle Based on Efficient NMPC Algorithm [J]. Automotive Engineering, 2022, 44(10): 1494-1502. |
| [13] | Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. |
| [14] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [15] | Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction [J]. Automotive Engineering, 2021, 43(6): 877-884. |
|