汽车工程 ›› 2022, Vol. 44 ›› Issue (3): 319-329.doi: 10.19562/j.chinasae.qcgc.2022.03.003
所属专题: 智能网联汽车技术专题-规划&控制2022年
江浩斌( ),冯张棋,洪阳珂,韦奇志,皮健
),冯张棋,洪阳珂,韦奇志,皮健
Haobin Jiang(),Zhangqi Feng,Yangke Hong,Qizhi Wei,Jian Pi
摘要:
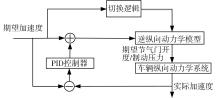
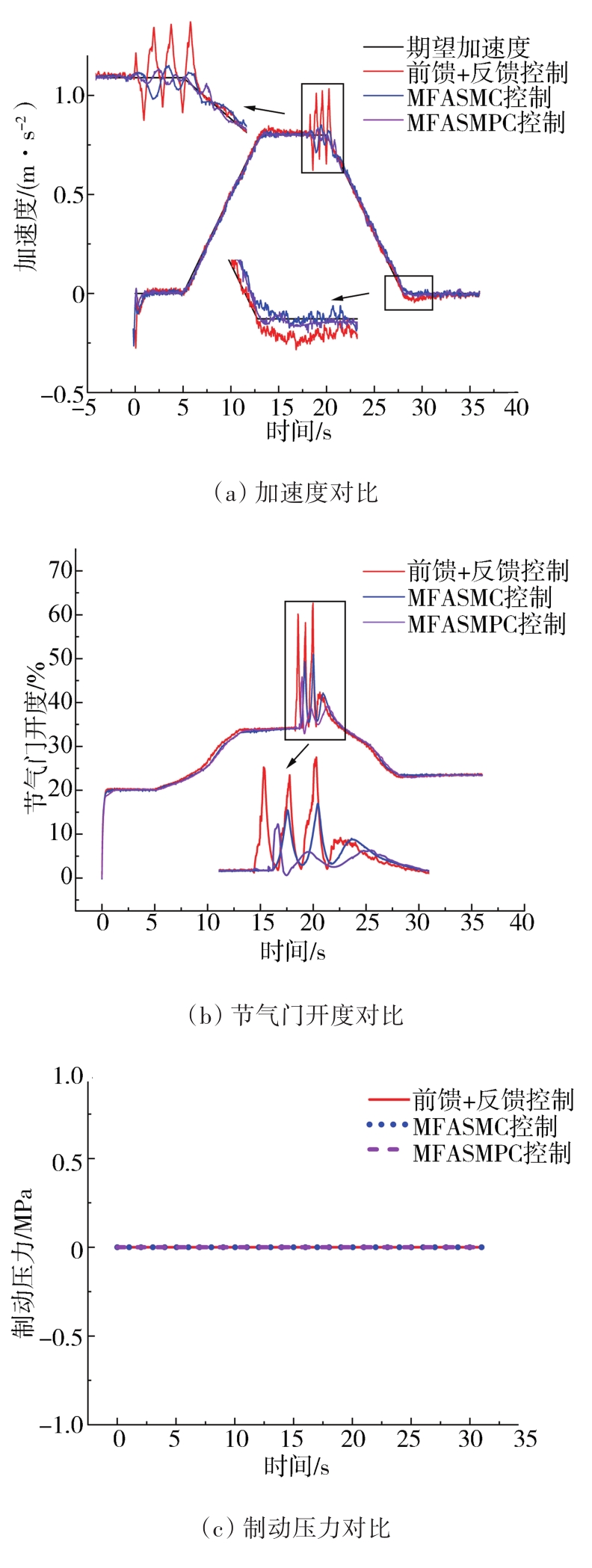
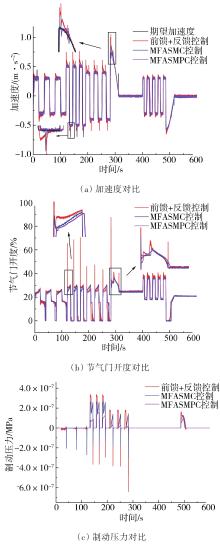
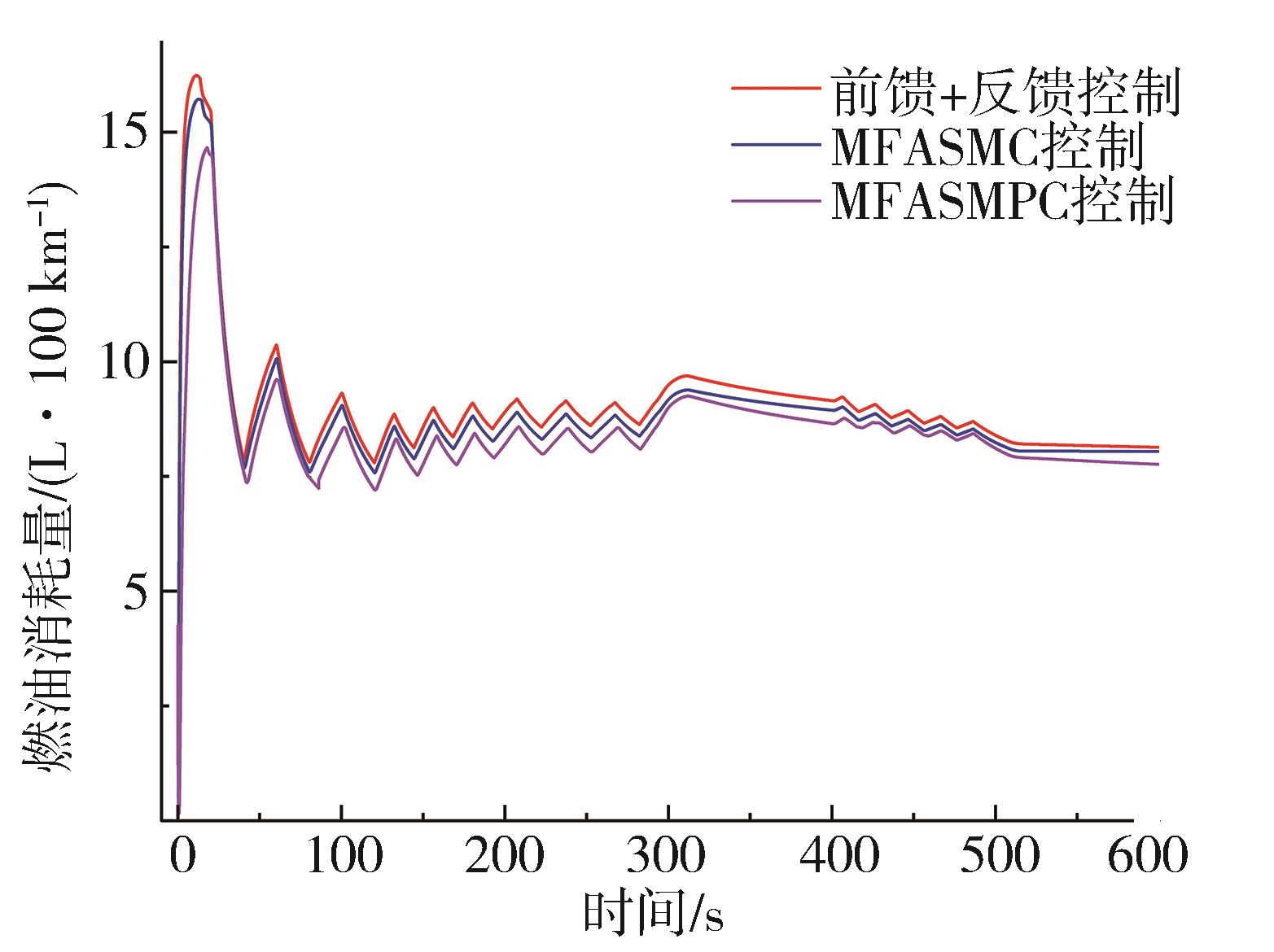
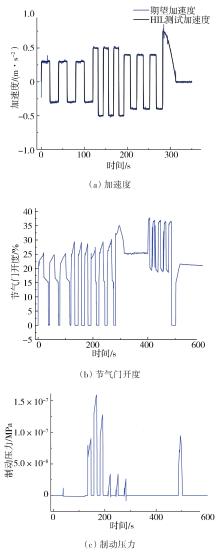
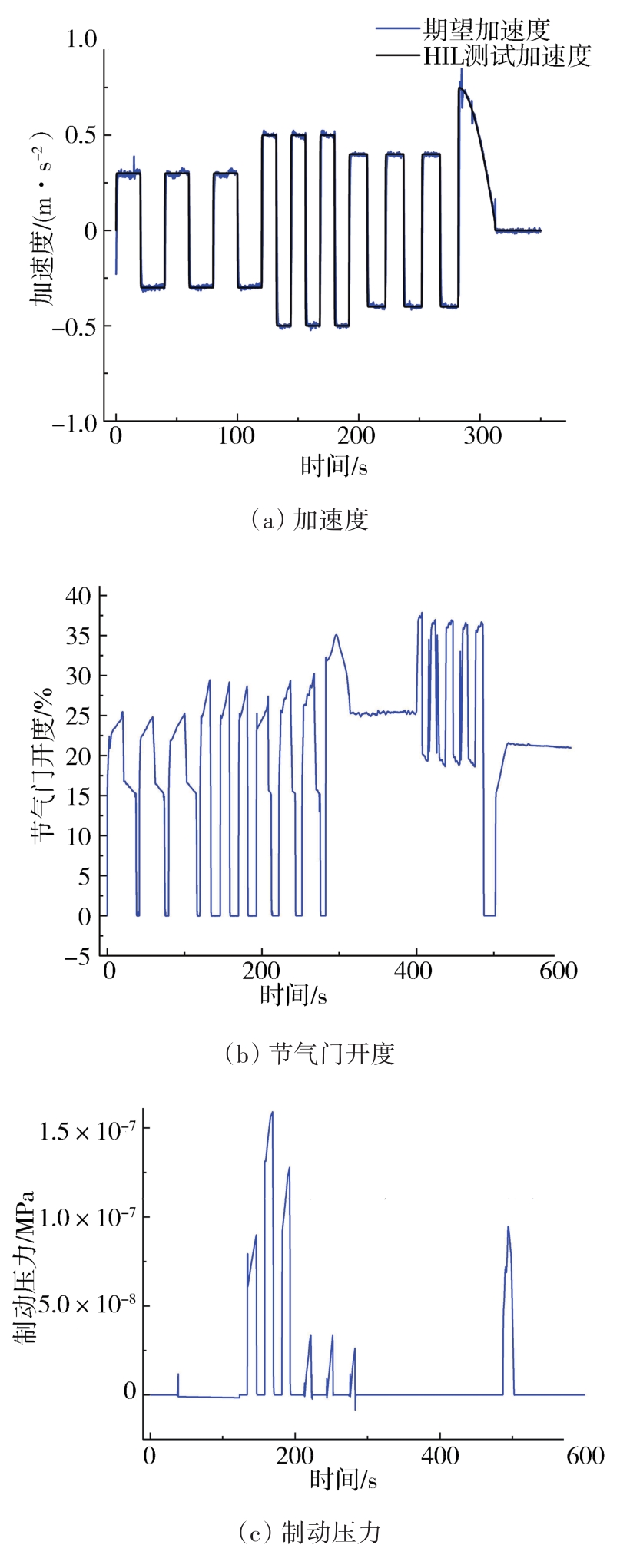
鉴于汽车纵向动力学系统为典型的参数时变不定、多扰动的非线性离散系统,基于精确数学模型的控制算法较难取得理想效果,本文中采用无需模型、基于输入/输出数据的控制算法。首先,基于紧格式动态线性化数据模型,将无模型自适应控制(MFAC)算法、滑模控制(SMC)算法和模型预测控制(MPC)算法相结合,设计了无模型自适应控制器。接着,通过理论分析对其进行了稳定性证明,最后将所提出的控制算法与常用于纵向控制的前馈+反馈算法和MFASMC(MFAC+SMC)算法进行了仿真对比,并通过硬件在环实验(HIL)验证了算法的有效性。结果表明,该控制算法响应速度快、鲁棒性强,且输出更为平滑,可较好地应用于智能汽车纵向动力学控制。