汽车工程 ›› 2023, Vol. 45 ›› Issue (1): 9-19.doi: 10.19562/j.chinasae.qcgc.2023.01.002
所属专题: 智能网联汽车技术专题-规划&决策2023年
兰凤崇,刘迎节,陈吉清( ),刘照麟
),刘照麟
Fengchong Lan,Yingjie Liu,Jiqing Chen(),Zhaolin Liu
摘要:
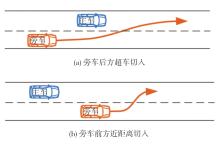
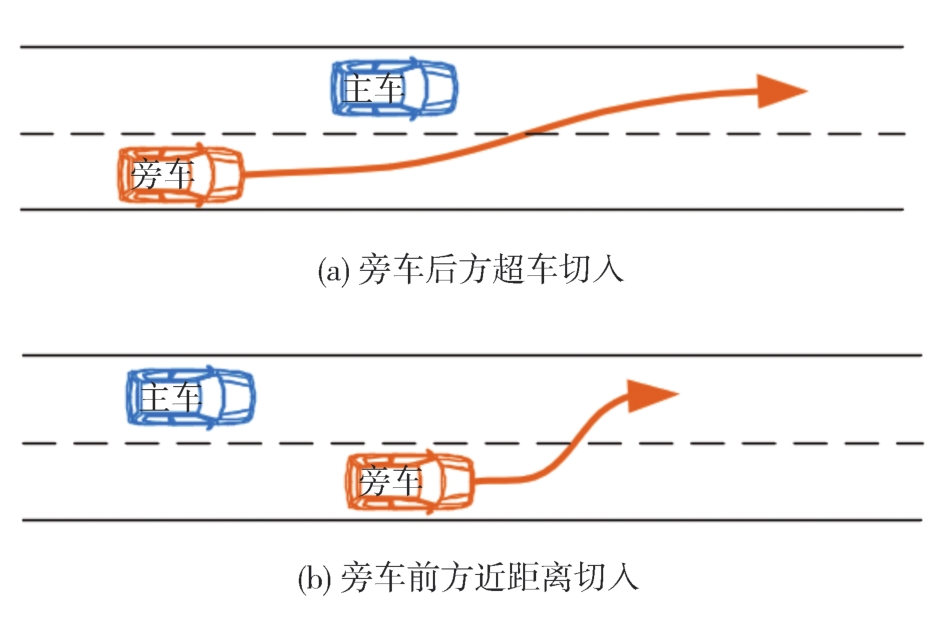
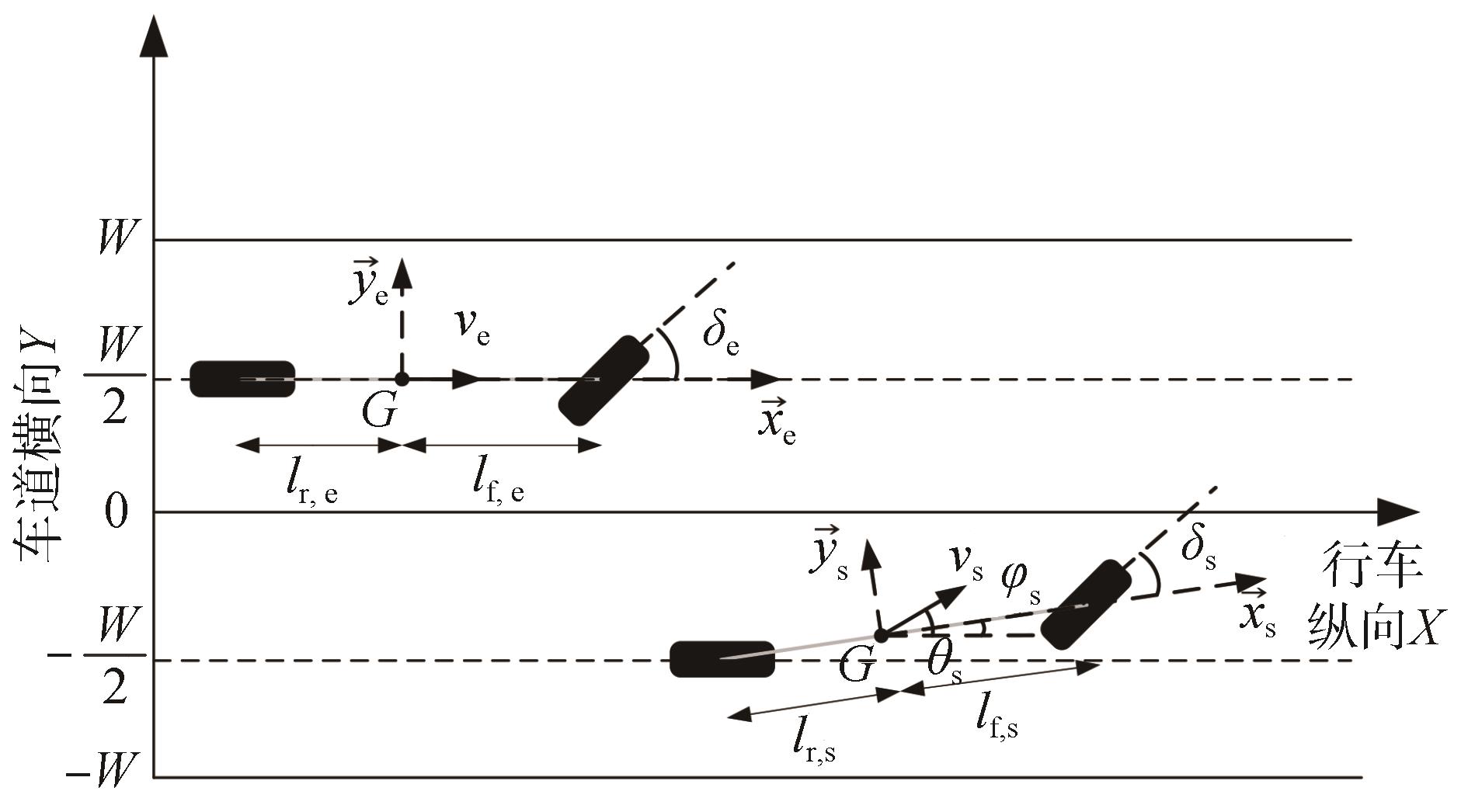
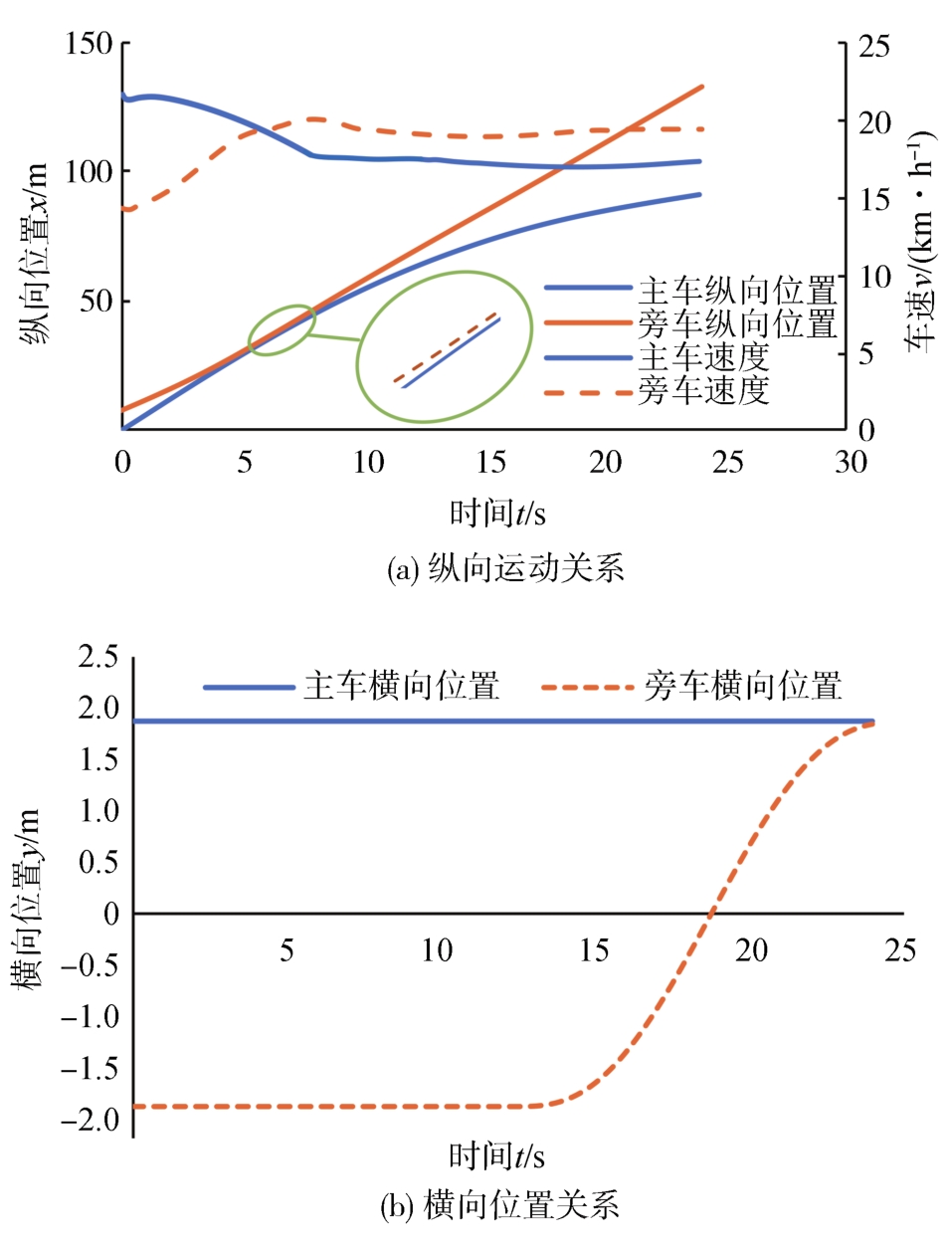
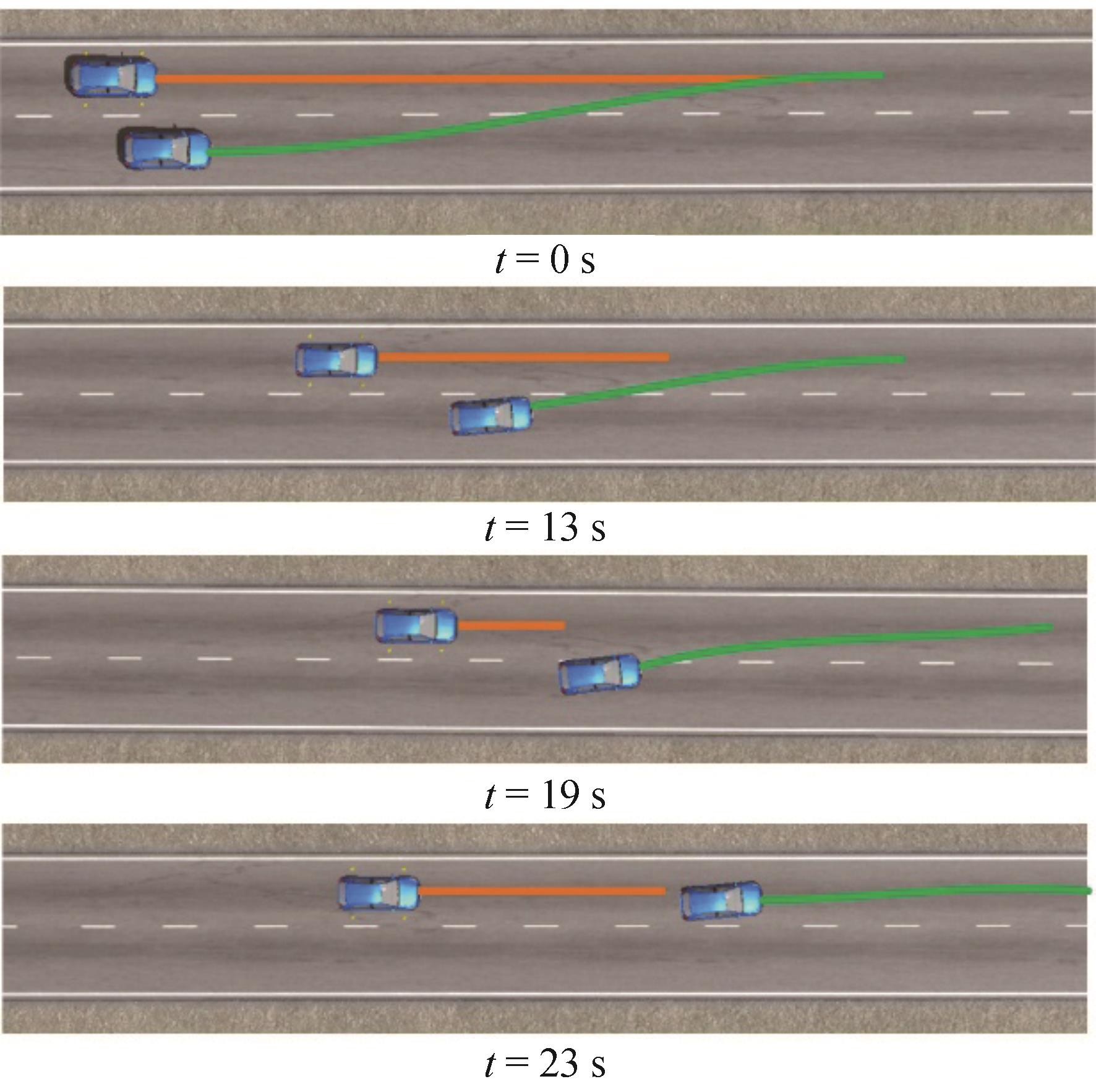
鉴于在车辆换道切入的场景中,自动驾驶车辆容易出现频繁的误减速、误避让,而造成通行能力和乘员舒适性的下降,提出一种基于主旁车动态博弈的切入场景决策规划算法。在行为决策层,根据切入场景中主旁车的冲突性关系,联立相关车辆运动方程建立整体系统的运动模型,构建考虑旁车状态的切入博弈模型,设计安全性和舒适性收益函数,进行驾驶行为博弈,输出行为决策结果。在轨迹规划层,根据车辆间距构建避障约束条件,以Sigmoid函数轨迹的变曲率和速度切向矢量的时间分量来构建车辆动力学约束。同时以加权收益方式联合考虑驾驶习惯和舒适性等需求,建立轨迹规划数学模型,求解得到满足上层博弈决策要求的运动轨迹。Carsim-Simulink联合仿真结果表明,在不同的初始条件下主车与切入的旁车能进行多种形式的合理的交互决策,准确完成切入场景下的运动规划任务,车辆能准确跟踪输出的轨迹,更符合一般驾驶习惯,提高了车辆的舒适性。