汽车工程 ›› 2024, Vol. 46 ›› Issue (6): 975-984.doi: 10.19562/j.chinasae.qcgc.2024.06.004
杨超1,2,杨帆1,王伟达1,2( ),郄天琪1,王彦松1,王宏伟2
),郄天琪1,王彦松1,王宏伟2
Chao Yang1,2,Fan Yang1,Weida Wang1,2(),Tianqi Qie1,Yansong Wang1,Hongwei Wang2
摘要:
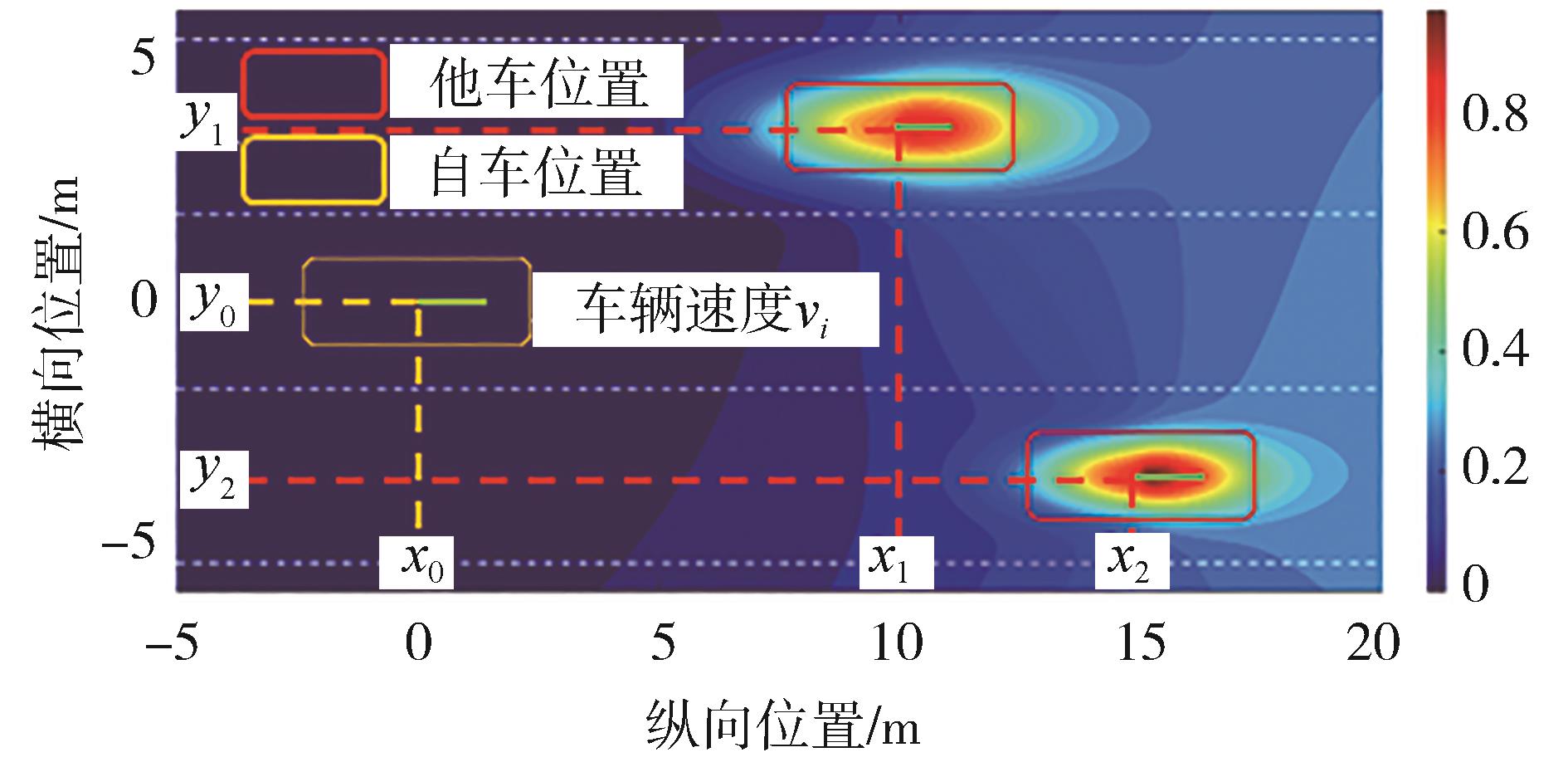
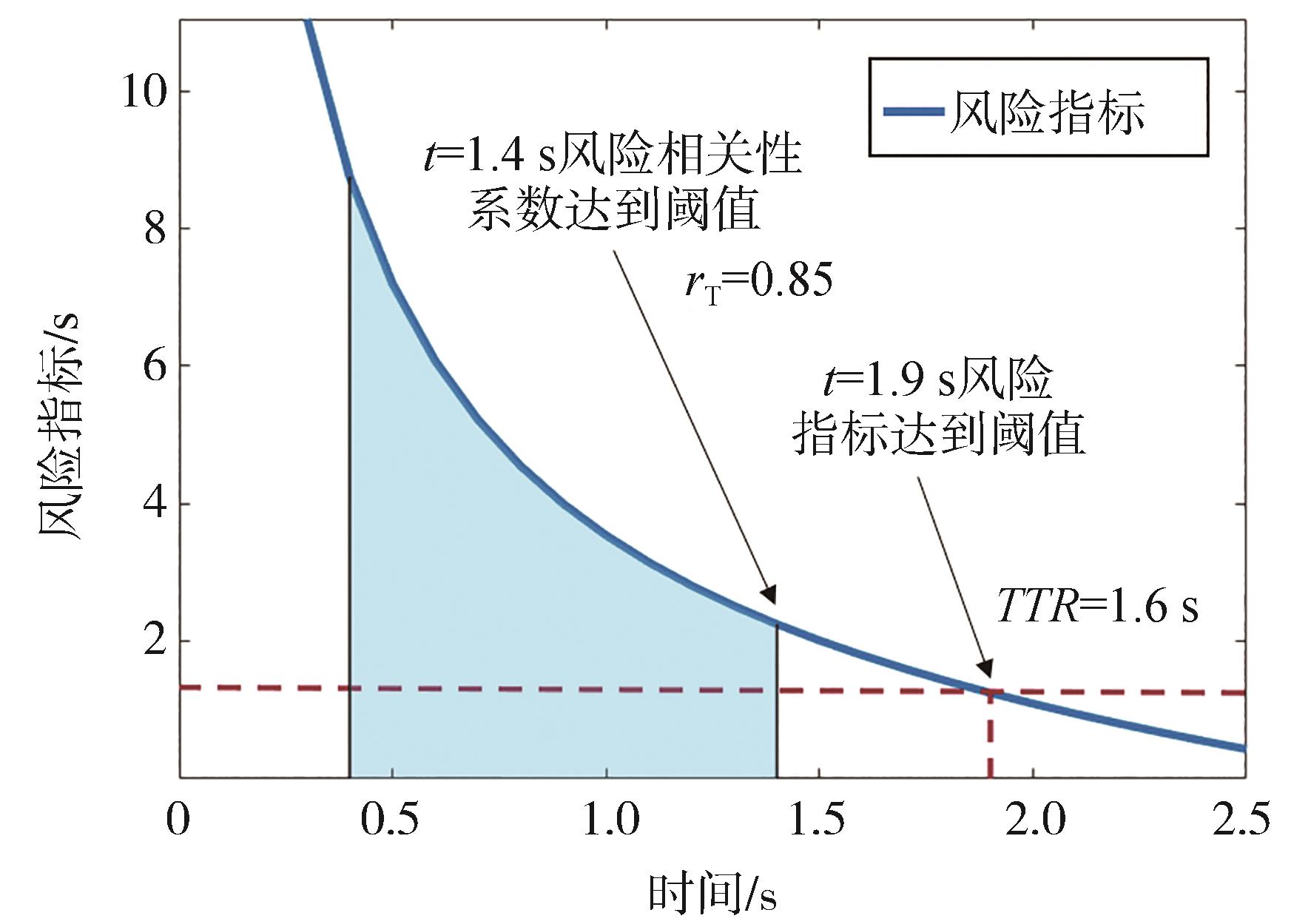
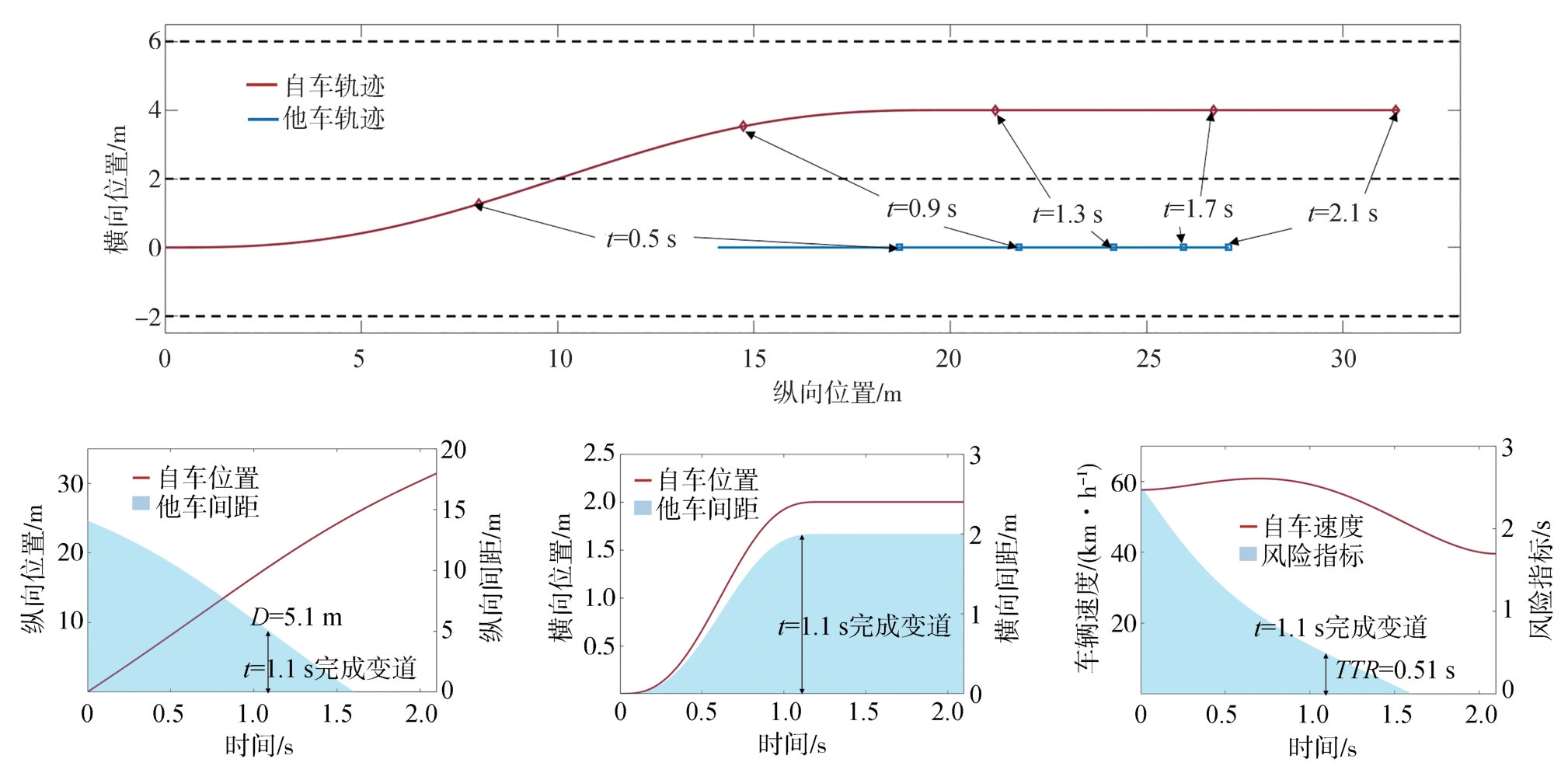
为完善复杂道路场景下智能驾驶车辆的碰撞风险评估方法,实时生成有效避险轨迹,本文提出了一种基于时空风险的智能驾驶车辆避险决策规划方法。首先,采用时空耦合的多域风险度量作为评估指标,监督智能驾驶车辆横纵向碰撞风险,同时实时监测行车风险指标变化,通过与典型避险场景风险数据库间的相关性分析,判断潜在碰撞风险大小,从而提前规避风险。然后,依据行车风险场对车辆目标状态进行不均匀采样,规避行车风险较高的驾驶区域,提高避险规划的安全性和实时性。试验结果表明,所提出的避险决策规划方法可安全有效地避开横纵向碰撞风险,并且根据风险指标的时域相关性分析可提前0.5 s发现潜在碰撞风险,从而提前平稳规避风险,不均匀采样可将避险轨迹平均规划时间由0.13 缩短到0.07 s。