汽车工程 ›› 2024, Vol. 46 ›› Issue (11): 1973-1982.doi: 10.19562/j.chinasae.qcgc.2024.11.004
高嵩1,2,周江邻2,高博麟1( ),芦健2,王鹤2,徐月云2
),芦健2,王鹤2,徐月云2
收稿日期:2024-05-28
修回日期:2024-07-01
出版日期:2024-11-25
发布日期:2024-11-22
通讯作者:
高博麟
E-mail:gaobolin@tsinghua.edu.cn
Song Gao1,2,Jianglin Zhou2,Bolin Gao1(),Jian Lu2,He Wang2,Yueyun Xu2
Received:2024-05-28
Revised:2024-07-01
Online:2024-11-25
Published:2024-11-22
Contact:
Bolin Gao
E-mail:gaobolin@tsinghua.edu.cn
摘要:
随着自动驾驶技术的不断发展,准确预测行人的未来轨迹已经成为确保系统安全和可靠的关键要素。然而,现有行人轨迹预测研究多数依赖于固定摄像头视角,进而限制了对行人运动的全面观测,因此难以直接应用于自动驾驶车辆自车视角(ego-vehicle)下的行人轨迹预测。针对该问题,本文提出了一种基于多行人信息融合网络(MPIFN)的自车视角行人轨迹预测方法。该方法通过融合社会信息、局部环境信息和行人时间信息,实现了对行人未来轨迹的准确预测。本文构建了一个局部环境信息提取模块,结合了可形变卷积与传统卷积和池化操作,旨在更有效地提取复杂环境中的局部信息。该模块通过动态调整卷积核的位置,增强了模型对不规则和复杂形状的适应能力。同时,构建了行人时空信息提取模块和多模态特征融合模块,以实现对社会信息与环境信息的充分融合。实验结果表明,该方法在JAAD和PSI两个自车视角下驾驶数据集上均取得了先进的性能。在JAAD数据集上,累积均方误差(CF_MSE)为4 063,累积平均均方误差(C_MSE)为829。在PSI数据集上平均相对偏差(ARB)和最终相对偏差(FRB)也分别在预测时间为0.5、1.0、1.5 s时取得了18.08、29.21、44.98和25.27、54.62、93.09的优异表现。
高嵩,周江邻,高博麟,芦健,王鹤,徐月云. 基于多信息融合网络的行人轨迹预测方法[J]. 汽车工程, 2024, 46(11): 1973-1982.
Song Gao,Jianglin Zhou,Bolin Gao,Jian Lu,He Wang,Yueyun Xu. Pedestrian Trajectory Prediction Method Based on Multi-information Fusion Network[J]. Automotive Engineering, 2024, 46(11): 1973-1982.
表1
固定视角与自车视角的差异对比"
| 对比项 | 固定视角 | 自车视角 |
|---|---|---|
| 摄像头位置 | 固定于某一位置 (如路口、建筑顶部) | 安装于车辆上,随车辆移动 |
| 视野范围 | 有限的、特定的视野范围 | 宽广的、移动的视野范围 |
| 环境稳定性 | 环境相对固定, 不随摄像头移动 | 环境随车辆移动而持续变化 |

图1
本文所提MPIFN框架图"
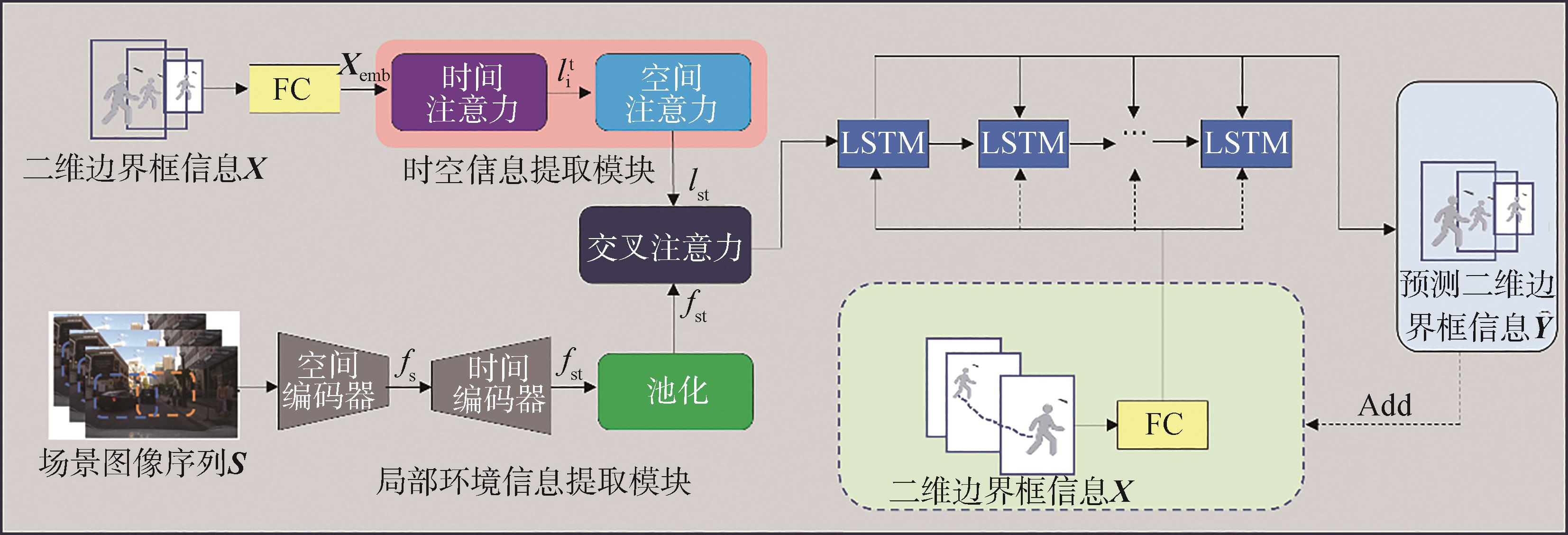
图2
局部环境信息提取模块"
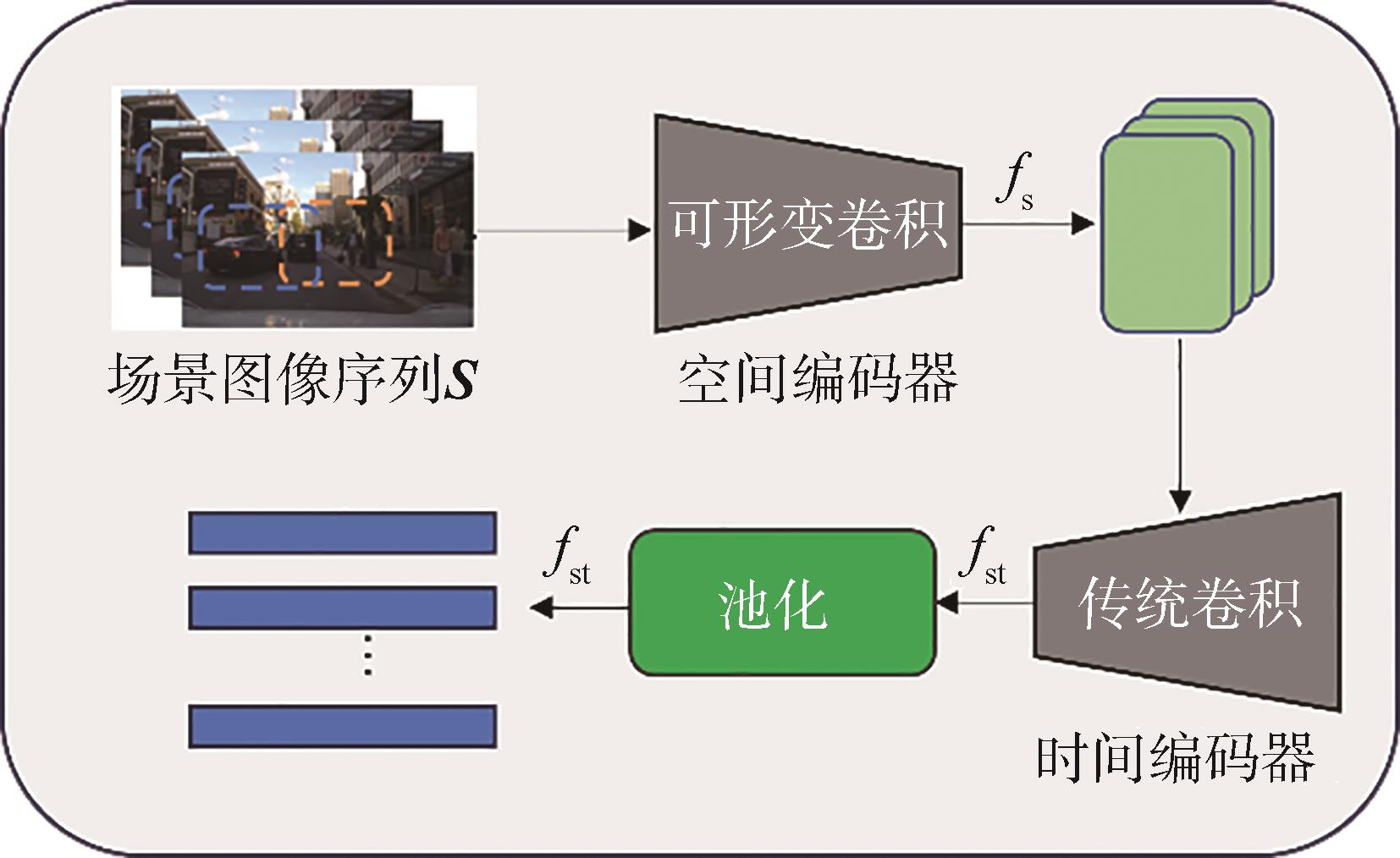

图3
时空信息提取模块"
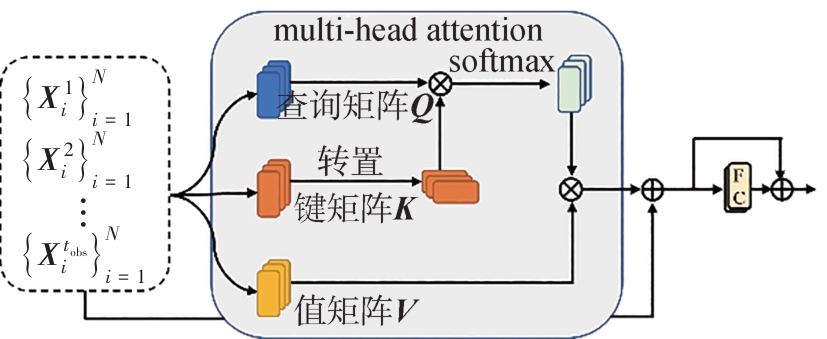
表2
在JAAD上实验结果"
| 方法 | Soc | Env | Soc-Env | PSI | ||
|---|---|---|---|---|---|---|
MSE↓ (0.5 s/1.0 s/1.5 s) | (1.5 s) | (1.5 s) | ||||
| Bayesian-LSTM[ | √ | 159/539/1 535 | 5 615 | 1 447 | ||
| FOL-X[ | √ | 147/484/1 374 | 4 924 | 1 290 | ||
| PIEtraj[ | √ | 110/399/1 280 | 4 780 | 1 183 | ||
| BiTraP[ | √ | 93/378/1 206 | 4 565 | 1 105 | ||
| eP2P[ | √ | √ | ||||
| SGNet[ | √ | 4 076 | 996 | |||
| CVTF[ | √ | 98/314/1 190 | 4 520 | 1 022 | ||
| Pedformer[ | √ | √ | √ | 93/364/1 134 | 4 364 | 1 080 |
| VOSTN[ | √ | 94/364/1 134 | 3 980 | |||
| MPIFN (Ours) | √ | √ | √ | 81/307/ | 829 | |
表3
在PSI上实验结果"
| 方法 | Soc | Env | Soc-Env | PSI | |||
|---|---|---|---|---|---|---|---|
ADE↓ (0.5 s/1.0 s/1.5 s) | FDE↓ (0.5 s/1.0 s/1.5 s) | ARB↓ (0.5 s/1.0 s/1.5 s) | FRB↓ (0.5 s/1.0 s/1.5 s) | ||||
| Bayesian-LSTM[ | √ | ||||||
| FOL-X[ | √ | ||||||
| PIEtraj[ | √ | ||||||
| BiTraP[ | √ | ||||||
| eP2P[ | √ | √ | |||||
| SGNet[ | √ | ||||||
| 本文 | √ | √ | √ | 10.00/17.13/27.67 | 14.66/34.56/62.21 | 18.08/29.21/44.98 | 25.27/54.62/93.99 |
表4
JAAD上消融实验结果"
| 项目 | 输入 | 时空信息提取模块 + 局部环境信息提取模块 + 多模态特征融合模块 | 解码器 | MSE (1.5 s) |
|---|---|---|---|---|
| Variant1 | Bbox | LSTM + - + - | FC | 2 458 |
| Variant2 | Bbox+Image | LSTM + 传统卷积 + Concat | FC | 2 103 |
| Variant3 | Bbox+Image | 时空注意力 + 传统卷积 + Concat | FC | 1 502 |
| Variant4 | Bbox+Image | 时空注意力 + 可形变卷积 + Concat | FC | 1 435 |
| Variant5 | Bbox+Image | 时空注意力 + 可形变卷积 + 交叉注意力 | FC | 1 307 |
| 本文 | Bbox+Image | 时空注意力 + 可形变卷积 + 交叉注意力 | LSTM | 1 106 |

图4
在JAAD数据集上的可视化结果"


图5
在PSI数据集上的可视化结果"
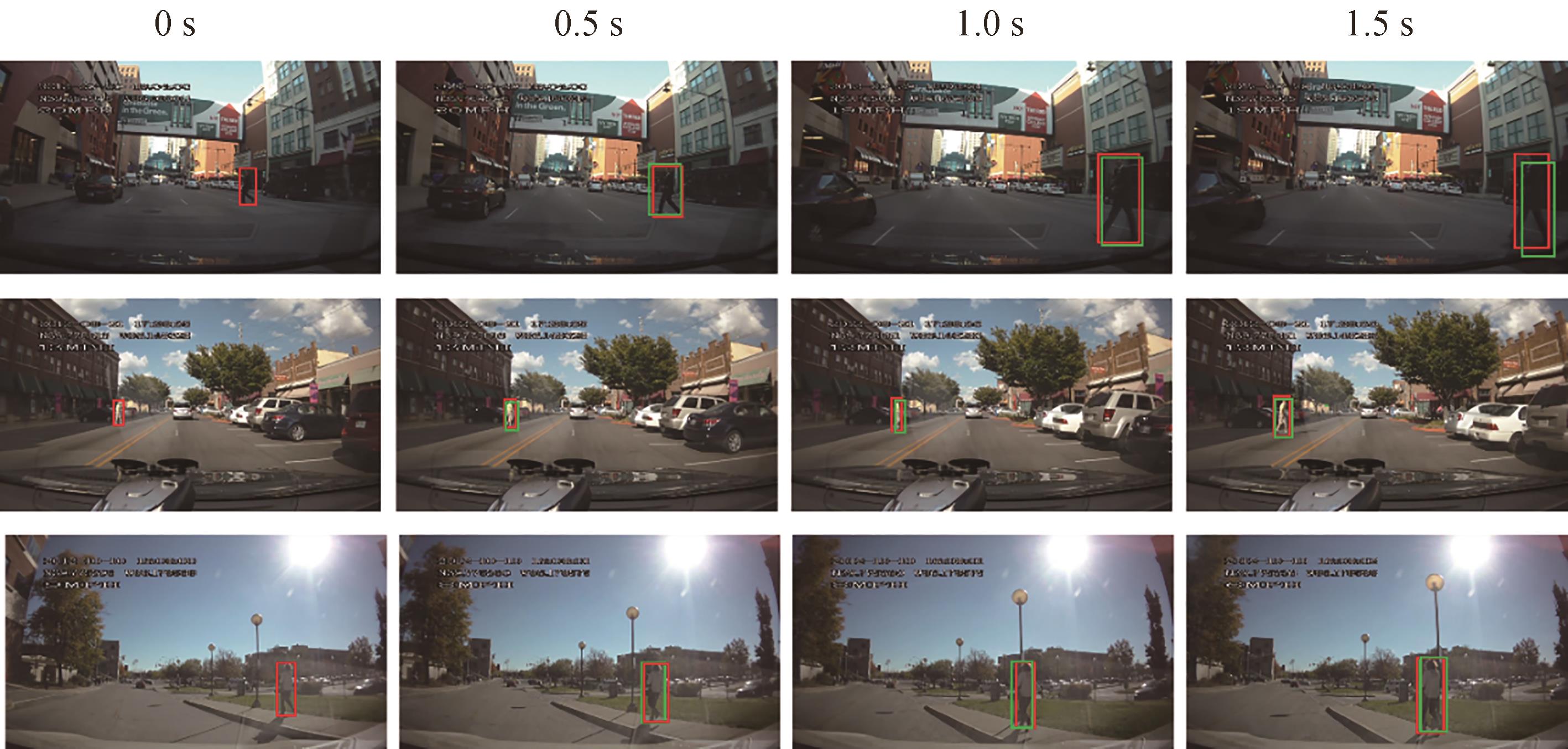
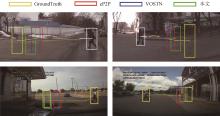
图6
在JAAD数据集(上)和PSI数据集(下)的可视化对比结果"

| 1 | MARCHETTI F, BECATTINI F, SEIDENARI L, et al. Smemo: social memory for trajectory forecasting[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(6): 4410-4425. |
| 2 | SUN J, LI Y, CHAI L, et al. Modality exploration, retrieval and adaptation for trajectory prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(12): 15051-15064. |
| 3 | SHI L, WANG L, LONG C, et al. Representing multimodal behaviors with mean location for pedestrian trajectory prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(9): 11184-11202. |
| 4 | YAO Y, ATKINS E, JOHNSON-ROBERSON M,et al.BiTraP: bi-directional pedestrian trajectory prediction with multi-modal goal estimation[J]. IEEE Robotics and Automation Letters,2021,6(2):1463-1470. |
| 5 | 郭景华, 何智飞, 罗禹贡, 等. 人机混驾环境下基于深度学习的车辆切入轨迹预测[J]. 汽车工程, 2022, 44(2): 153-160. |
| GUO J H, HEI Z F, LUO Y G, et al. Vehicle cut-in trajectory prediction based on deep learning in a human-machine mixed driving environment [J]. Automotive Engineering, 2022, 44(2): 153-160. | |
| 6 | 郭景华, 肖宝平, 王靖瑶, 等. 基于 Residual BiLSTM 网络的车辆切入意图预测研究[J]. 汽车工程, 2021, 43(7): 971-977. |
| GUO J H, XIAO B P, WANG J Y, et al. Study on vehicle cut⁃in intention prediction based on residual BiLSTM network [J]. Automotive Engineering, 2021, 43(7): 971-977. | |
| 7 | GODARD C, MAC AODHA O, BROSTOW G J. Unsupervised monocular depth estimation with left-right consistency[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 270-279. |
| 8 | CHEN Y, SCHMID C, SMINCHISESCU C. Self-supervised learning with geometric constraints in monocular video: connecting flow, depth, and camera[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 7063-7072. |
| 9 | BHATTACHARYYA A, FRITZ M, SCHIELE B. Long-term on-board prediction of people in traffic scenes under uncertainty[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 4194-4202. |
| 10 | YAO Y, XU M, CHOI C, et al. Egocentric vision-based future vehicle localization for intelligent driving assistance systems[C]. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 9711-9717. |
| 11 | YAGI T, MANGALAM K, YONETANI R, et al. Future person localization in first-person videos[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 7593-7602. |
| 12 | CHEN T, JING T, TIAN R, et al. Psi: a pedestrian behavior dataset for socially intelligent autonomous car[J]. arXiv preprint arXiv: , 2021. |
| 13 | RASOULI A, KOTSERUBA I, KUNIC T, et al. Pie: a large-scale dataset and models for pedestrian intention estimation and trajectory prediction[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 6262-6271. |
| 14 | WANG C, WANG Y, XU M, et al. Stepwise goal-driven networks for trajectory prediction[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2716-2723. |
| 15 | NEUMANN L, VEDALDI A. Pedestrian and ego-vehicle trajectory prediction from monocular camera[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 10204-10212. |
| 16 | SU Y, LI Y, WANG W, et al. A unified environmental network for pedestrian trajectory prediction[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2024, 38(5): 4970-4978. |
| 17 | FU Z, JIANG K, XIE C, et al. Summary and reflections on pedestrian trajectory prediction in the field of autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2024. |
| 18 | HASAN F, HUANG H. MALS-Net: a multi-head attention-based LSTM sequence-to-sequence network for socio-temporal interaction modelling and trajectory prediction[J]. Sensors, 2023, 23(1): 530. |
| 19 | 桑海峰, 赵梓杉, 王金玉, 等. 基于车辆轨迹预测对抗性攻击与鲁棒性研究[J]. 汽车工程, 2024, 46(3): 407-417. |
| SANG H F, ZHAO Z S, WANG J Y, et al. Research on adversarial attacks and robustness in vehicle trajectory prediction [J]. Automotive Engineering, 2024, 46(3): 407-417. | |
| 20 | DAI J, QI H, XIONG Y, et al. Deformable convolutional networks[C]. Proceedings of the IEEE International Conference on Computer Vision, 2017: 764-773. |
| 21 | DU J, WANG S, MIAO H, et al. Multi-channel pooling graph neural networks[C]. IJCAI. 2021: 1442-1448. |
| 22 | GROSSBERG S. Recurrent neural networks[J]. Scholarpedia, 2013, 8(2): 1888. |
| 23 | GRAVES A, GRAVES A. Long short-term memory[J]. Supervised Sequence Labelling with Recurrent Neural Networks, 2012: 37-45. |
| 24 | RASOULI A, KOTSERUBA I, TSOTSOS J K. Are they going to cross? a benchmark dataset and baseline for pedestrian crosswalk behavior[C]. Proceedings of the IEEE International Conference on Computer Vision Workshops, 2017: 206-213. |
| 25 | KOSARAJU V, SADEGHIAN A, MARTÍN-MARTÍN R, et al. Social-bigat: multimodal trajectory forecasting using bicycle-gan and graph attention networks[J]. Advances in Neural Information Processing Systems, 2019, 32. |
| 26 | YAO Y, XU M, WANG Y, et al. Unsupervised traffic accident detection in first-person videos[C]. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019: 273-280. |
| 27 | HE Y, YANG Y, CAI Y, et al. Predicting pedestrian tracks around moving vehicles based on conditional variational transformer[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023: 09544070231175536. |
| 28 | RASOULI A, KOTSERUBA I. PedFormer: pedestrian behavior prediction via cross-modal attention modulation and gated multitask learning[C]. 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023: 9844-9851. |
| 29 | WANG J, SANG H, CHEN W, et al. VOSTN: variational one-shot transformer network for pedestrian trajectory prediction[J]. Physica Scripta, 2024, 99(2): 026002. |
| 30 | LABRíN C, URDINEZ F. Principal component analysis[M]. R for Political Data Science. Chapman and Hall/CRC, 2020: 375-393. |
| 31 | SANAGA K P, YANG M S. Unsupervised K-means clustering algorithm [J]. IEEE Access, 2020, 8: 80716-80727. |
| 32 | HAN K, XIAO A, WU E, et al. Transformer in transformer[J]. Advances in Neural Information Processing Systems, 2021, 34: 15908-15919. |
| 33 | OKK AN U, SERBES Z A. Rainfall-runoff modeling using least squares support vector machines[J]. Environmetrics, 2012, 23(6): 549-564. |
| 34 | TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805. |
| 35 | LIU L, FENG S, FENG Y, et al. Learning-based stochastic driving model for autonomous vehicle testing[J]. Transportation Research Record, 2022, 2676(1): 54-64. |
| [1] | 李道飞,潘豪. 场景复杂度评估在轨迹预测和驾驶决策中的应用[J]. 汽车工程, 2024, 46(9): 1556-1563. |
| [2] | 朱冰,范天昕,赵健,张培兴,宋东鉴,薛越,赵文博. 自动驾驶拟人连续交互测试场景生成方法[J]. 汽车工程, 2024, 46(9): 1600-1607. |
| [3] | 张国娟,胡宏宇,李浩淼,王明剑,高菲,高镇海. 自动驾驶车辆乘坐舒适性评价研究综述[J]. 汽车工程, 2024, 46(9): 1617-1627. |
| [4] | 张佳楠,胡钊政,孟杰,胡华桦,左洁. 面向车-路-图协同的分布式自动驾驶仿真平台架构及应用[J]. 汽车工程, 2024, 46(8): 1335-1345. |
| [5] | 颜伏伍,向博文,胡杰,陈锐鹏,张志豪,刘昊岩,高宠智. 基于改进LPV模型的自动驾驶轻型货车横向控制[J]. 汽车工程, 2024, 46(8): 1403-1413. |
| [6] | 陶乐,王海,蔡英凤,陈龙. 面向自动驾驶场景的多目标点云检测算法[J]. 汽车工程, 2024, 46(7): 1208-1218. |
| [7] | 李琳辉,付一帆,王霆,王雪成,连静. 引入自监督预训练的轨迹预测方法[J]. 汽车工程, 2024, 46(7): 1219-1227. |
| [8] | 王海,张桂荣,罗彤,邱梦,蔡英凤,陈龙. 面向自动驾驶道路场景中异常案例的多模态数据挖掘算法[J]. 汽车工程, 2024, 46(7): 1239-1248. |
| [9] | 王海,丁玉轩,罗彤,邱梦,蔡英凤,陈龙. 驾驶场景下结合运动速度以及外观特征的多类多目标跟踪方法[J]. 汽车工程, 2024, 46(6): 956-964. |
| [10] | 黄晶,刘祥臻,邓潇阳,陈然. 基于多模态轨迹预测的智能车轨迹规划研究[J]. 汽车工程, 2024, 46(6): 965-974. |
| [11] | 王国栋,刘立,孟宇,杜海平,白国星,顾青. 自动驾驶汽车避撞极限研究[J]. 汽车工程, 2024, 46(6): 985-994. |
| [12] | 姚福星,孙超,兰云港,卢兵,王博,于海洋. 基于混合专家模型的智能网联汽车换道决策方法[J]. 汽车工程, 2024, 46(5): 882-892. |
| [13] | 李梦凡,冯忠祥,张卫华,李靖宇. 面向人机共驾模式下驾驶人接管过程的视觉转移特性研究[J]. 汽车工程, 2024, 46(5): 795-804. |
| [14] | 杜国栋,邹渊,张旭东,孙文景,孙巍. 基于双估计强化学习结合前向预测控制的自动驾驶运动控制研究[J]. 汽车工程, 2024, 46(4): 564-576. |
| [15] | 丁志杰,王亚飞,章翼辰,邬明宇,王亦乐. 基于复合动态采样的自动驾驶矿车节能路径规划方法[J]. 汽车工程, 2024, 46(4): 588-595. |
|