汽车工程 ›› 2022, Vol. 44 ›› Issue (6): 842-850.doi: 10.19562/j.chinasae.qcgc.2022.06.005
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
孙航1,2,李志军1( ),张琳琳2,陈振宇2,李世龙1
),张琳琳2,陈振宇2,李世龙1
收稿日期:2021-12-27
修回日期:2022-02-15
出版日期:2022-06-25
发布日期:2022-06-28
通讯作者:
李志军
E-mail:zhijunli@tju.edu.cn
基金资助:
Hang Sun1,2,Zhijun Li1(),Linlin Zhang2,Zhenyu Chen2,Shilong Li1
Received:2021-12-27
Revised:2022-02-15
Online:2022-06-25
Published:2022-06-28
Contact:
Zhijun Li
E-mail:zhijunli@tju.edu.cn
摘要:
本文中提出了基于自动驾驶目标和事件探测与响应(OEDR)的测试道路分类方法,构建基于设计运行范围的道路元素基础模型,改进Jaccard Similarity有效相似度算法用于测试道路符合性评估。本文中还根据测试道路选取,提出了基于设计运行条件(ODC)边界的测试方法,结合乘员主观评价形成自动驾驶汽车实际道路测评体系。选取我国典型道路开展的试验结果表明,本文中提出的测评体系具有可行性和普适性,可作为一种标准化方法广泛应用。
孙航,李志军,张琳琳,陈振宇,李世龙. 基于OEDR和ODC的自动驾驶汽车实际道路测试评价技术研究[J]. 汽车工程, 2022, 44(6): 842-850.
Hang Sun,Zhijun Li,Linlin Zhang,Zhenyu Chen,Shilong Li. Research on the Test and Evaluation Technique of Real Roads for Automated Driving Vehicles Based on OEDR and ODC[J]. Automotive Engineering, 2022, 44(6): 842-850.
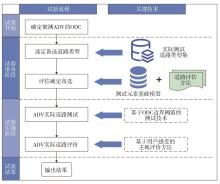
图1
ADV实际道路测试评价工程框架"
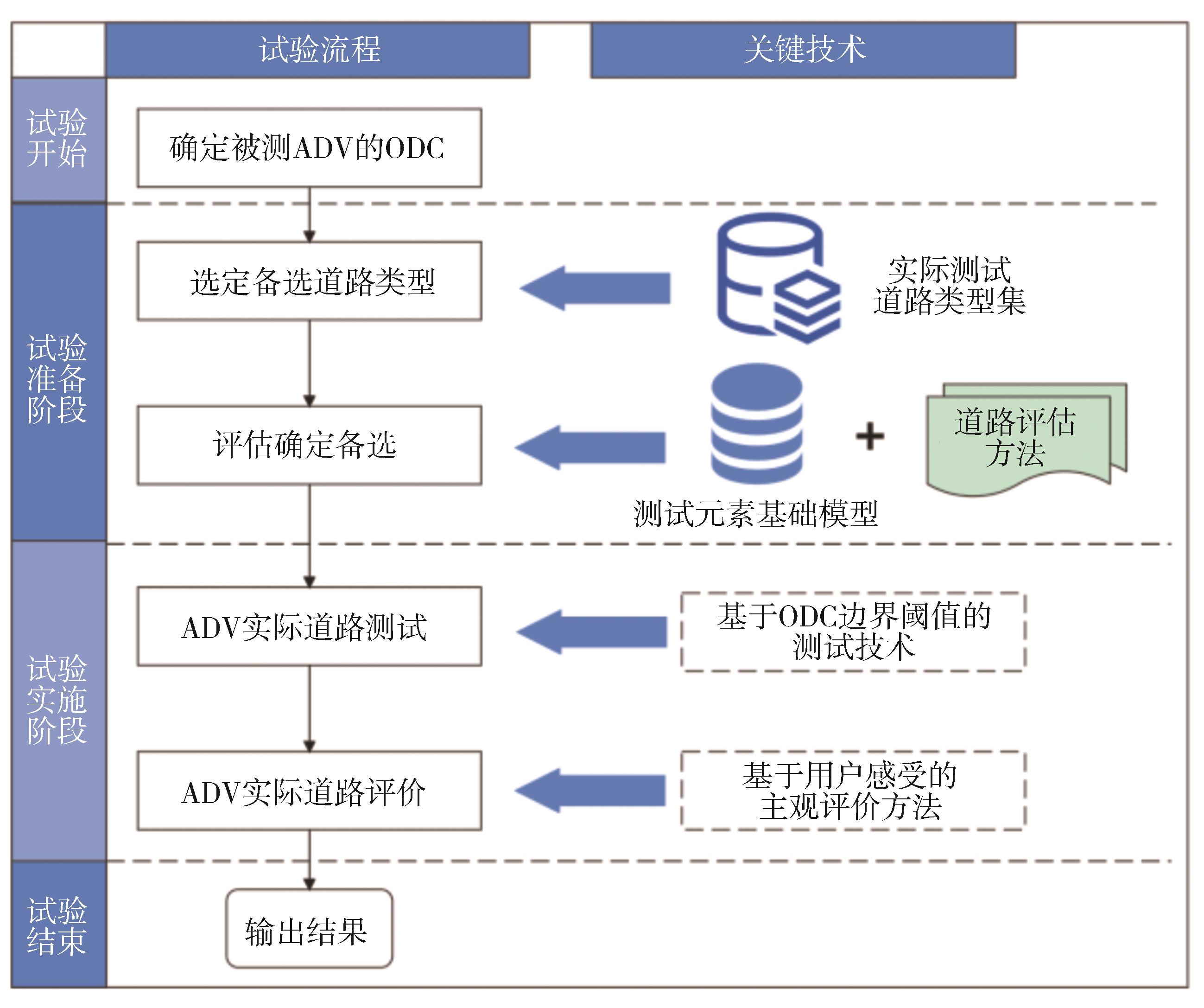
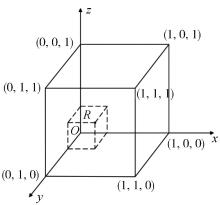
图2
OEDR三维坐标系"
表1
ADV测试典型道路表"
| R(x, y, z) | 道路特征 | 典型道路 |
|---|---|---|
| R1(0, 0, 0) | 无机动车(或有可预测车辆),道路完全结构化,无弱势交通参与者 | 高度自动化厂区等 |
| R2(0, 0, 1) | 无机动车(或有可预测车辆)、道路完全结构化、存在弱势使用者的道路 | 旅游区、机场等 |
| R3(0, 1, 0) | 无机动车(或有可预测车辆)、道路非结构化、不存在弱势使用者的道路 | 荒野 |
| R4(0, 1, 1) | 无机动车(或有可预测车辆)、道路非结构化、存在弱势使用者的道路 | 住宅小区等 |
| R5(1, 0, 0) | 有机动车、道路完全结构化、不存在弱势使用者的道路 | 高速、城市快速路等 |
| R6(1, 0, 1) | 有机动车、道路完全结构化、存在弱势使用者的道路 | 城市道路等 |
| R7(1, 1, 0) | 有机动车、道路非结构化、不存在弱势使用者的道路 | 矿区、砂场工地等 |
| R8(1, 1, 1) | 有机动车、道路非结构化、存在弱势使用者的道路 | 乡间道路等 |
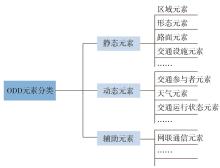
图3
用于道路选择的ODD元素分类方法"
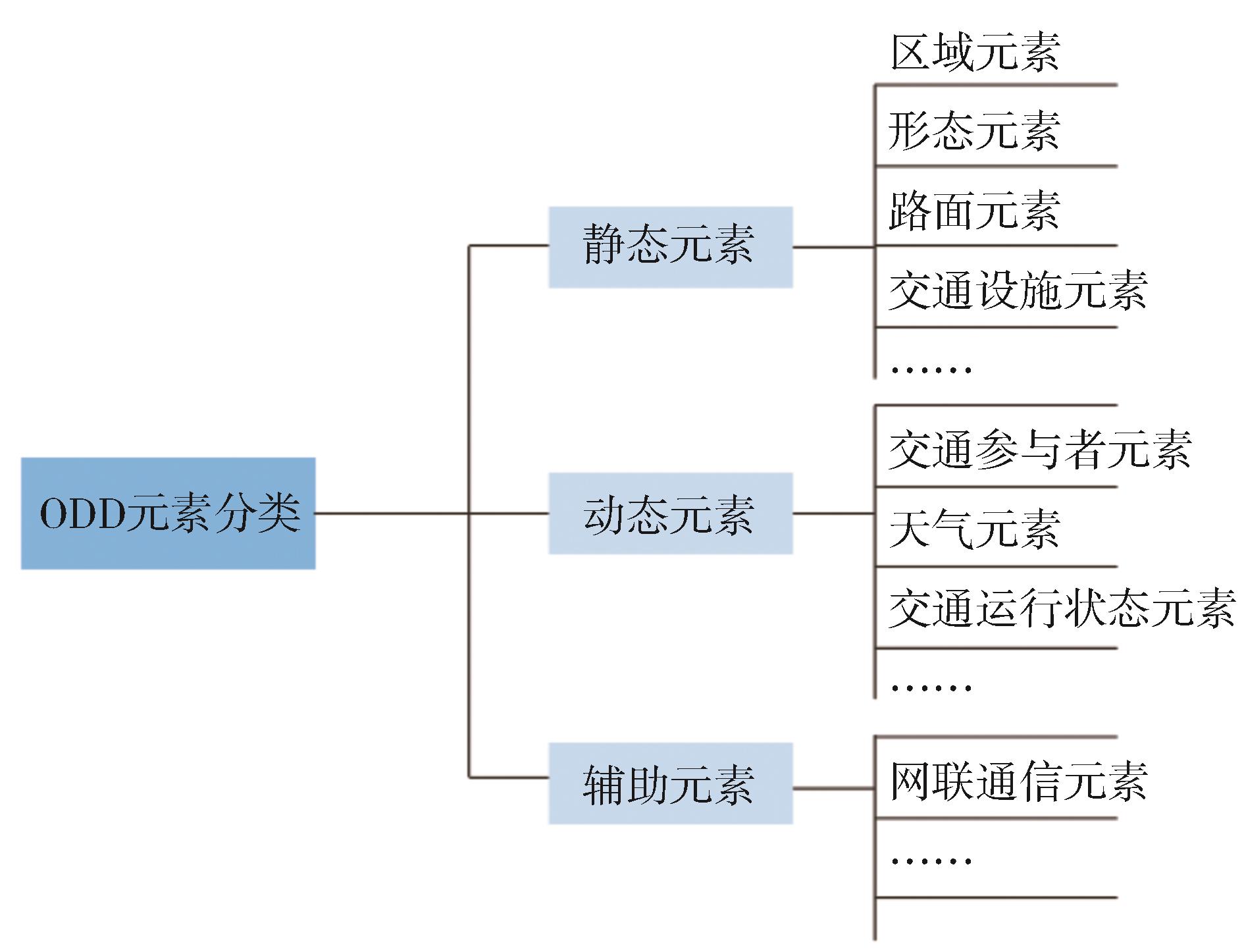
表2
不同类型道路的测试元素基础模型"
| 1级元素 | 2级元素 | 3级元素 | 元素要求 | Ⅰ类 | Ⅱ类 | Ⅲ类 |
|---|---|---|---|---|---|---|
| 静态元素 | 是否包含 | |||||
| 道路结构 | 平面 | 弯道半径 | 400-650 m | √ | ||
| 60-400 m | √ | √ | ||||
| 横断面 | 中央分隔 | √ | √ | √ | ||
| 无行人非机动车道 | … | √ | ||||
| … | ||||||
| 纵断面 | 纵坡 | 3%-6% | √ | √ | √ | |
| … | … | |||||
| 道路路面 | 路面状态 | 车道线清晰 | … | √ | √ | √ |
| … | … | … | ||||
| 动态元素 | 是否包含 | |||||
| 交通运行状态 | 低密度 … | 道路实际交通流量/道路设计最大交通能力 | ≤0.3 … | √ | √ | √ |
| 行人交通流量 | 高密度 | 医院,商场,地铁站口等 | … | √ | √ | |
| … | … | … | … | |||
| 辅助元素 | 是否包含 | |||||
| 通信定位 | 位置信号 | … | … | √ | √ | √ |
| … | … | … | … | |||

图4
基于ODC边界的测试示意图"
表3
基于ODC边界阈值的测试指标示例"
| 测试项目 | 具体要求 |
|---|---|
| 通用要求 | ①试验过程中不应发生自动驾驶功能失效。 |
| 系统激活与停用 | ①车辆点火(上电)启动后(发动机自动启停除外),自动驾驶系统应符合下列规定之一: ——试验车辆自动驾驶功能应处于未激活状态; ——符合车辆制造商声明的条件下,试验车辆自动驾驶功能可以自动处于就绪状态。 |
| ②试验车辆自动驾驶功能处于“就绪”状态下,试验人员可通过制造商声明的专用操纵方式激活自动驾驶功能;处于“未就绪”状态下,试验人员通过专用操纵方式不可激活自动驾驶功能。 | |
| … | |
| 系统后援 | ①若系统发出接管请求信号,该信号应符合以下要求: ——车辆应及时发出信号,保证驾驶员有充足的时间接管车辆控制; … |
②在系统发出接管请求期间,试验车辆应满足以下要求: ——若交通畅通,车辆不能减速至停止。 … | |
| … | |
| 执行动态驾驶任务 | ①自动驾驶功能应持续控制车辆执行动态驾驶任务,不应导致合理可预见且可避免的交通事故。 |
②自动驾驶系统运行过程中,应符合下列要求: a)不发生干预; … | |
| … |
表4
ADV实际道路测试主观评价表"
| 类型 | 内容要求 |
|---|---|
| 功能运行 | 自动驾驶功能开启方式便于驾驶员操作 |
| 车辆接管方式便于驾驶员操作 | |
| 非紧急模式下本车的车速稳定,车速变化不会让人产生眩晕和其他不适症状 | |
| 车辆能够及时响应车辆周边道路障碍物或相关交通设施 | |
| 车辆是否能够及时响应到车辆周边可对本车行驶产生影响的其他交通参与者 | |
| 紧急避险动作是否过于频繁 | |
| 车辆发出的自动驾驶接管请求是否过于频繁 | |
| HMI | 提示方式是否足够醒目 |
| 提示内容是否足够清晰 | |
| 提示内容是否足够及时 | |
| 提示方式是否便于理解 | |
| 产品说明 | 车辆使用说明清晰易懂 |
| 总分 |

图5
我国B市实际测试道路地图路线"

表5
ADV实际道路测试未通过项结果"
| 序号 | 不符合项 | 测试情况 |
|---|---|---|
| 1 | 自动驾驶系统运行过程中不发生干预 | Ⅰ.夜间路口处驾驶员主动干预 |
| Ⅱ.车辆未能及时减速避让前方横穿的非机动车,人工干预进行减速制动 | ||
| Ⅲ.车辆行驶至十字路口向左转弯处,遇左侧社会车辆因闯红灯横穿并停止在直行待行区域,车辆不能做出相应的规避动作绕行通行,人工介入通过路口 | ||
| Ⅳ.车辆在经过港湾式公交站台时未能识别前方路肩与路面交汇处,人工介入躲避路肩 | ||
| 2 | 车辆行驶期间,除换道情况外不碰轧“对向车道分界线”和“同向车道分界线” | Ⅰ.车辆在路口处向右侧转弯时后轮压线 |
| Ⅱ.车辆在行驶至终点时车轮右侧越过最右侧实线 | ||
| Ⅲ.车辆行驶至十字路口处右后侧车轮压实线,造成的原因是车辆无法识别左侧隔离栏,故向右侧躲避 | ||
| Ⅳ.车辆行驶至十字路口处因侧后方有社会车辆无法及时在虚线处变道,行驶至十字路口实线处变道 | ||
| Ⅴ.前方社会车辆再由匝道横穿并入主路时车辆未能及时减速避让,导致压实线变道避让 | ||
| 3 | 驻车等待时,不碰轧停止线停车 | Ⅰ.车辆在红绿灯十字路口处驻车等待时前轮越过白色停止线 |
| 4 | 遵守交通信号灯指示信号行驶 | Ⅰ.车辆在夜间行驶至十字路口处向左转弯时,交通指示灯为绿色,车辆减速制动停止在停止线前 |
| Ⅱ.车辆在行驶至十字路口处向左转弯时未能及时识别交通信号灯变化,人工介入减速制动 | ||
| 5 | 不违规占用专用车道行驶或停车 | Ⅰ.车辆在行驶至公交车专用车道处,且路况良好的情况下并无变道趋势 |
| 6 | 行驶效率不应低于人类驾驶员一般驾驶水平,适应真实交通流,避免过多或长时间等待,且不应影响正常交通流 | Ⅰ.车辆在行驶过程中经过人行横道时制动停止,并长时间驻车等待 |
表6
主观评价打分汇总表"
| 类型 | 内容要求 | 得分 |
|---|---|---|
| 功能运行 | 自动驾驶功能开启方式便于驾驶员操作 | 9/8/8 |
| 车辆接管方式便于驾驶员操作 | — | |
| 非紧急模式下本车的车速稳定,车速变化不会让人产生眩晕及其他不适症状 | 9/8/8 | |
| 车辆能够及时响应车辆周边道路障碍物或相关交通设施 | 9/7/7 | |
| 车辆是否能够及时响应到车辆周边可对本车行驶产生影响的其他交通参与者 | 9/7/7 | |
| 紧急避险动作是否过于频繁 | — | |
| 车辆发出的自动驾驶接管请求是否过于频繁 | — | |
| HMI | 提示方式是否足够醒目 | 8/6/5 |
| 提示内容是否足够清晰 | 7/7/6 | |
| 提示内容是否足够及时 | 9/7/7 | |
| 提示方式是可以接受的方式 | 6/7/6 |
| 1 | Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles: J3016—2021[S/OL].[2021-12-08].https://www.sae.org/standards/content/j3016_202104/. |
| 2 | 马兴.智能网联汽车技术的发展研究[J].无线互联科技,2021,18(23):88-89. |
| MA X. Study on development of intelligent connected vehicle technology[J].Wireless Internet Technology,2021,18(23):88-89. | |
| 3 | 刘法旺,李艳文,李国俊,等. 欧美日智能网联汽车准入管理研究及启示[J].汽车文摘,2021(5):1-7. |
| LIU F W, LI Y W, LI G J, et al. Research and thinking on type approval of intelligent connected vehicles in Europe, America and Japan [J]. Automotive Digest (Chinese), 2021(5):1-7. | |
| 4 | A framework for automated driving system testable cases and scenarios [EB/OL]. (2018-09-01) [2021-12-08]. https://rosap. ntl.bts.gov /view/dot/38824. |
| 5 | HUANG W L, WANG K, LV Y, et al. Autonomous vehicles testing methods review[C]. IEEE International Conference on Intelligent Transportation Systems. IEEE, 2016. |
| 6 | JIA D, SUN J, SHARMA A, et al. Integrated simulation platform for conventional, connected and automated driving: a design from cyber–physical systems perspective[J]. Transportation Research Part C: Emerging Technologies, 2021, 124: 102984. |
| 7 | 邓晓峰, 王润民, 徐志刚,等. 我国智能网联汽车测试及示范基地发展现状[J]. 汽车工业研究, 2019(1):8. |
| DENG X F, WANG R M, XU Z G, et al. Development status of Intelligent connected vehicle test and demonstration base in China[J]. Auto Industry Research, 2019(1):8. | |
| 8 | FREMONT D J, KIM E, PANT Y V, et al. Formal scenario-based testing of autonomous vehicles: from simulation to the real world[C]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2020: 1-8. |
| 9 | 王荣,孙亚夫,宋娟. 自动驾驶车辆道路测试场景评价方法与试验验证[J].汽车工程, 2021, 43(4):620-628. |
| WANG R,SUN Y F, SONG J. Evaluation method and test verification of road test scenes for autonomous vehicles[J]. Automotive Engineering, 2021, 43(4):620-628. | |
| 10 | 2020 Disengagement reports, department of motor vehicles[EB/OL].(2020-08-12)[2021-12-08]. https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/disengagement-reports/. |
| 11 | 上海市智能网联汽车开放道路测试报告(2020年)[R/OL].上海市交通委员会,2021. http://jtw.sh.gov.cn/tzgg/20210311/ c01c4178110447ca9cceecac8e244d7d.html. |
| Road test report of self-driving vehicles in Shanghai(2020) [R/OL]. Shanghai Municipal Transportation Commission, 2021. http://jtw.sh.gov.cn/tzgg/20210311/c01c4178110447ca9cceecac8e244d7d.html. | |
| 12 | 北京市自动驾驶车辆道路测试报告(2020年)[R/OL].北京智能车联产业创新中心,2021. https://www.doc88.com/p- 78139096881471.html?r=1. |
| Road test report of self-driving vehicles in Beijing (2020)[ R/OL]. Beijing Intelligent Vehicle Association Industry Innovation Center,2021. https://www.doc88.com/p- 78139096881471.html?r=1. | |
| 13 | INAGAKI T, SHERIDAN T B. A critique of the SAE conditional driving automation definition, and analyses of options for improvement[J]. Cognition, Technology & Work, 2019,21(4):569-578. |
| 14 | 全国汽车标准化技术委员会. 汽车和挂车类型的术语和定义: GB/T 3730.1—2001[S/OL]. [2021-12-08]. http://std.samr.gov.cn /gb/search/gbDetailed?id=71F772D78455D3A7E05397BE0A0AB82A. |
| National Technical Committee of Auto Standardization. Motor vehicles and trailers-types-terms and definitions: GB/T 3730.1—2001[S/OL]. [2021-12-08]. http://std.samr.gov.cn /gb/search/gbDetailed?id=71F772D78455D3A7E05397BE0A0AB82A. | |
| 15 | WANG X, QIN D, CAFISO S, et al. Operational design domain of autonomous vehicles at skewed intersection[J]. Accident Analysis and Prevention, 2021,159:106241. |
| 16 | 孙航,张行,张淼,等. 自动驾驶系统设计运行条件构建方法的研究[J]. 中国汽车, 2020 (12):9. |
| SUN H, ZHANG H, ZHANG M, et al. Research on the construction method of operational design condition of intelligent and connected vehicle[J]. China Auto, 2020(12):9. | |
| 17 | JACCARD P. The distribution of the flora in the alpine zone [J]. New Phytologist, 2010, 11(2):37-50. |
| 18 | 赵建恒, 许蕴山, 邓有为,等. 针对预警机的主客观权重相结合的TOPSIS法多目标排序[J]. 计算机测量与控制, 2014, 22(10):4. |
| ZHAO J H, XU Y S, DENG Y W, et al. TOPSIS based on objective and subjective weights in muti-targets sequence for AWACS[J]. Computer Measurement & Control, 2014, 22(10):4. | |
| 19 | FARAH H, BHUSARI S, VAN GENT P, et al. An empirical analysis to assess the operational design domain of lane keeping system equipped vehicles combining objective and subjective risk measures[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(5): 2589-2598. |
| 20 | 田晓雪. 汽车主观性能评价方法研究[D]. 西安: 长安大学, 2014. |
| TIAN X X. Research on automobile subjective performance evaluation method[D]. Xi’an: Changan University, 2014. | |
| 21 | 全国汽车标准化技术委员会. 汽车驾驶自动化分级: GB/T 40429—2021[S/OL]. [2021-12-08]. http://std.samr.gov.cn/gb/ search/gbDetailed?id=CA6C0E542CB4C983E05397BE0A0AED11. |
| National Technical Committee of Auto Standardization. Taxonomy of driving automation for vehicles: GB/T 40429—2021[S/OL]. [2021-12-08]. http://std.samr.gov.cn/gb/ search/gbDetailed?id=CA6C0E542CB4C983E05397BE0A0AED11. | |
| 22 | 工业和信息化部印发关于加强智能网联汽车生产企业及产品准入管理的意见[EB/OL]. (2021-08-12)[2021-12-08]. http://www.gov.cn/zhengce/zhengceku/2021-08/12/content_5630912.htm. |
| The MIIT issued a guideline on strengthening the access management of intelligent and connected vehicles manufacturers and their products[EB/OL]. (2021-08-12) [2021-12-08]. http://www.gov.cn/zhengce/zhengceku/2021-08/ 12/content_5630912.htm. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 吕立群, 徐龙, 尹航, 杨杨, 葛蕴珊. 重型柴油车实际道路NO x 排放分析方法研究[J]. 汽车工程, 2024, 46(1): 151-160. |
| [4] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [5] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [6] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [9] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
|