汽车工程 ›› 2025, Vol. 47 ›› Issue (6): 1133-1143.doi: 10.19562/j.chinasae.qcgc.2025.06.012
• • 上一篇
朱凌云( ),王海洋
),王海洋
收稿日期:2024-11-20
修回日期:2025-02-04
出版日期:2025-06-25
发布日期:2025-06-20
通讯作者:
朱凌云
E-mail:zhulingyun@cqut.edu.cn
基金资助:
Lingyun Zhu(),Haiyang Wang
Received:2024-11-20
Revised:2025-02-04
Online:2025-06-25
Published:2025-06-20
Contact:
Lingyun Zhu
E-mail:zhulingyun@cqut.edu.cn
摘要:
在降雪气候条件下,雪花颗粒对激光雷达的干扰会导致点云特征缺失,严重影响LiDAR三维目标检测模型的准确性。本文提出一种基于Transformer架构的雪天点云特征补全检测算法:首先设计点云损失补全模块,通过多头注意力机制与混合密度网络联合提取原始点云缺失特征;其次构建编码器-解码器结构实现缺失特征生成,并开发融合重定义模块通过通道注意力机制实现特征对齐;最后优化预测框输出策略提升检测可靠性。在CADC数据集上,汽车与行人检测精度分别提升2.06%和2.73%;在KITTI数据集上3类目标平均精度提升1.51%。通过量化分析降雪强度与点云生成数量的影响规律,验证了本文所提方法的鲁棒性和工程适用性。
朱凌云,王海洋. 基于LiDAR点云特征补全的雪天无人车目标检测[J]. 汽车工程, 2025, 47(6): 1133-1143.
Lingyun Zhu,Haiyang Wang. Autonomous Vehicle Object Detection by LiDAR Point Cloud Feature Completion in Snowfall Scenarios[J]. Automotive Engineering, 2025, 47(6): 1133-1143.
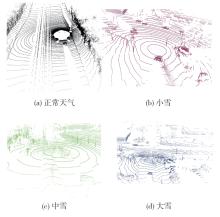
图 1
各降雪量时的雷达点云图"
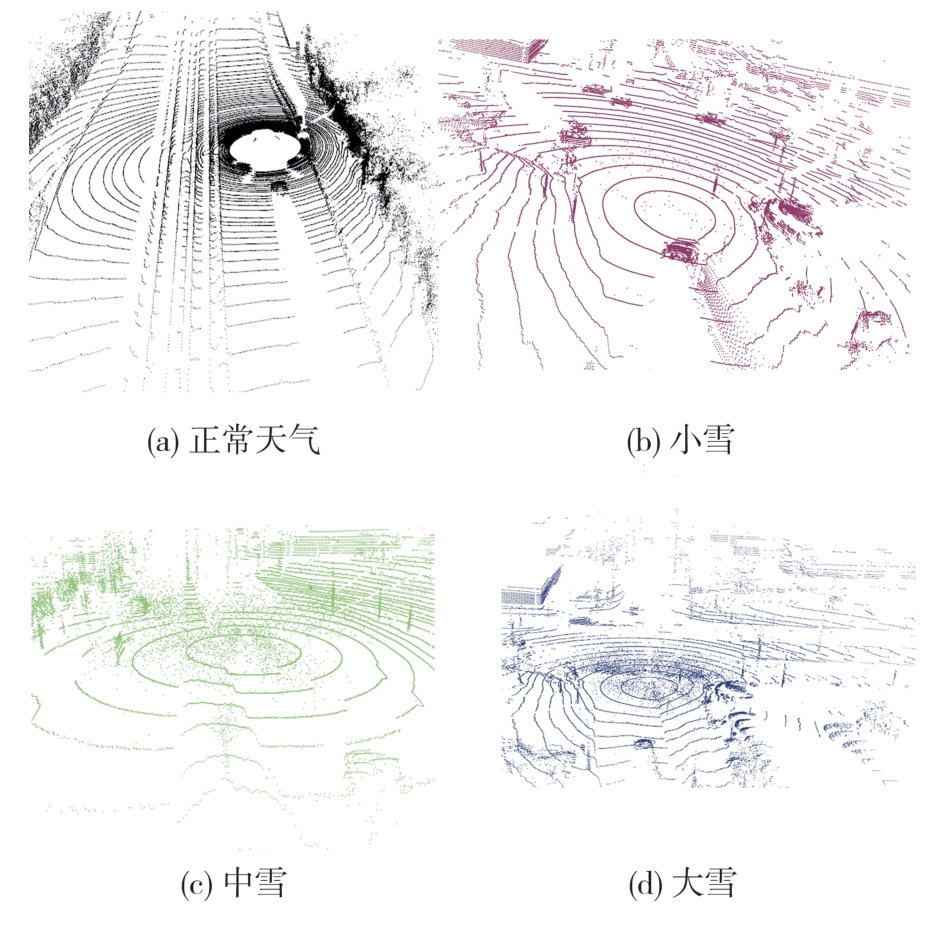

图 2
总体框架图"
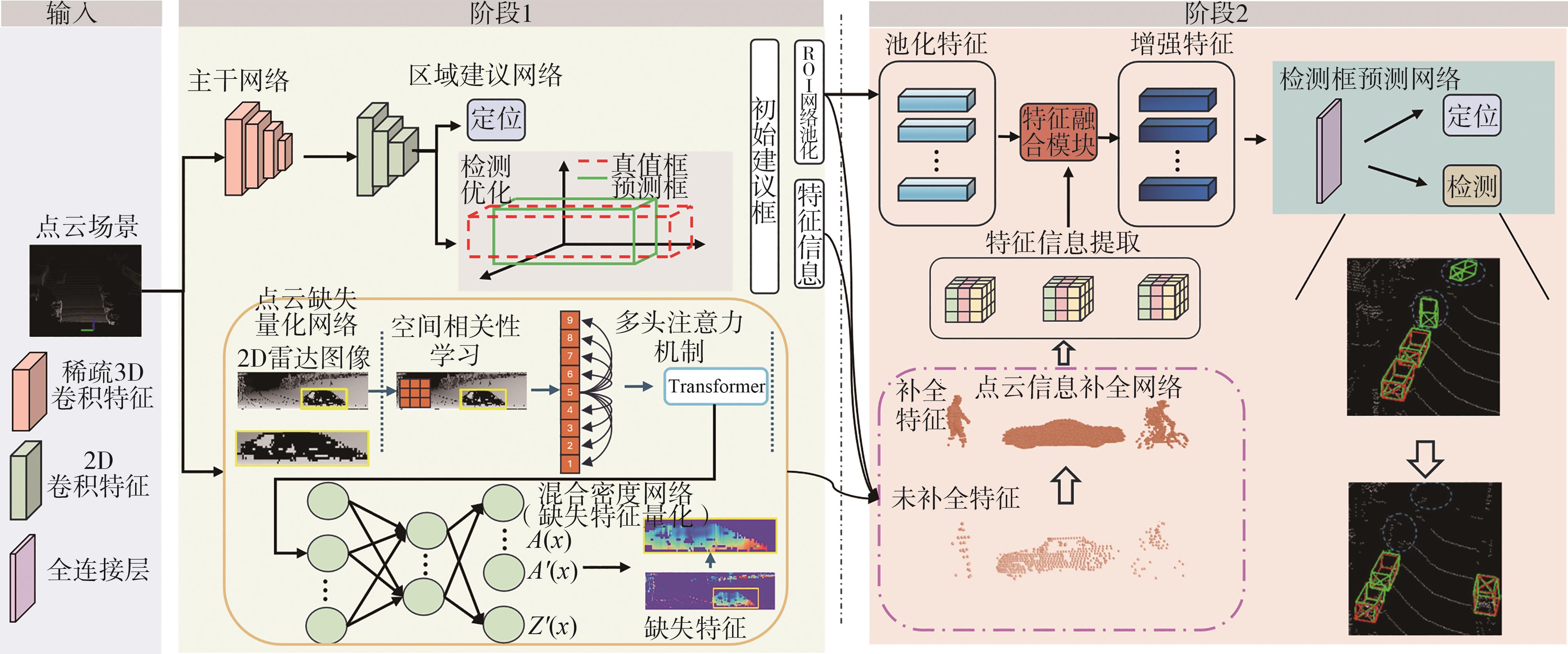

图 3
点云退化情况图"

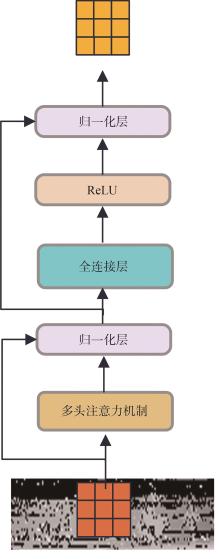
图 4
空间相关性提取"
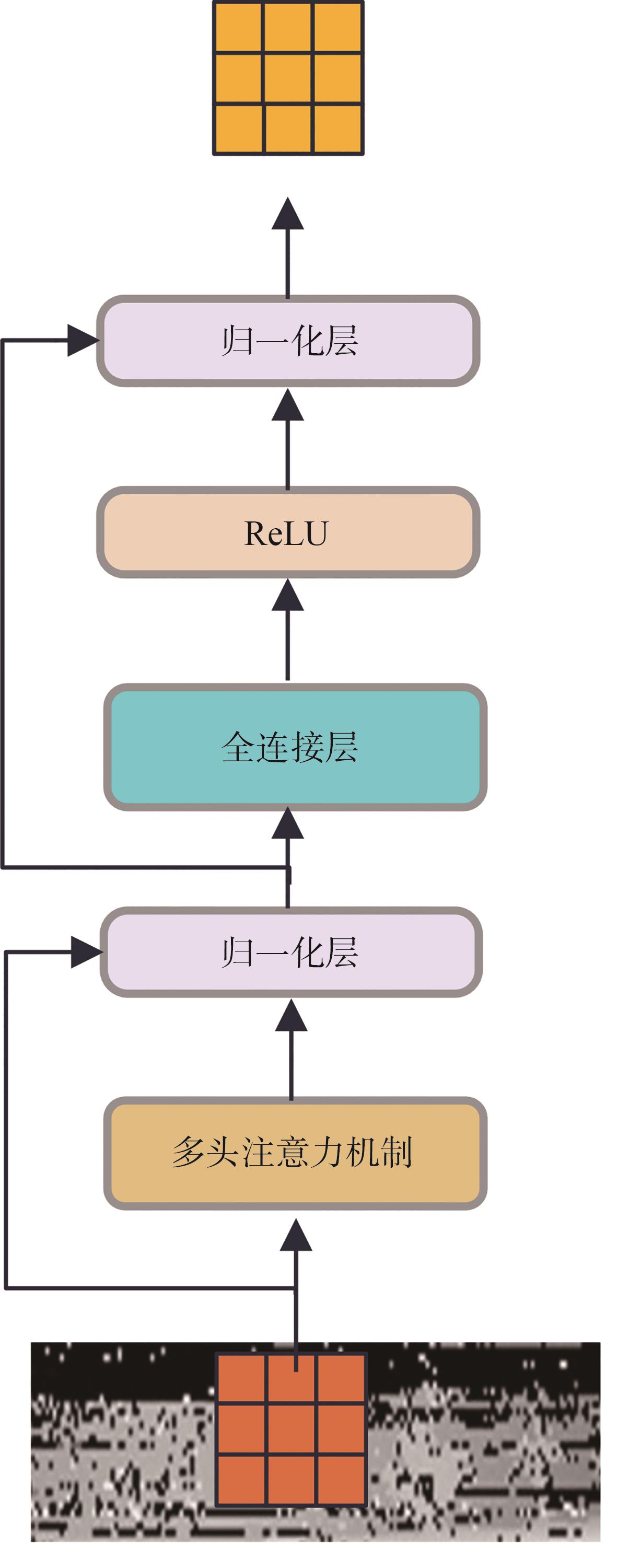
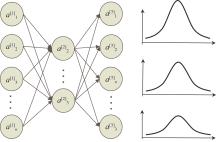
图 5
混合密度网络拓扑结构"
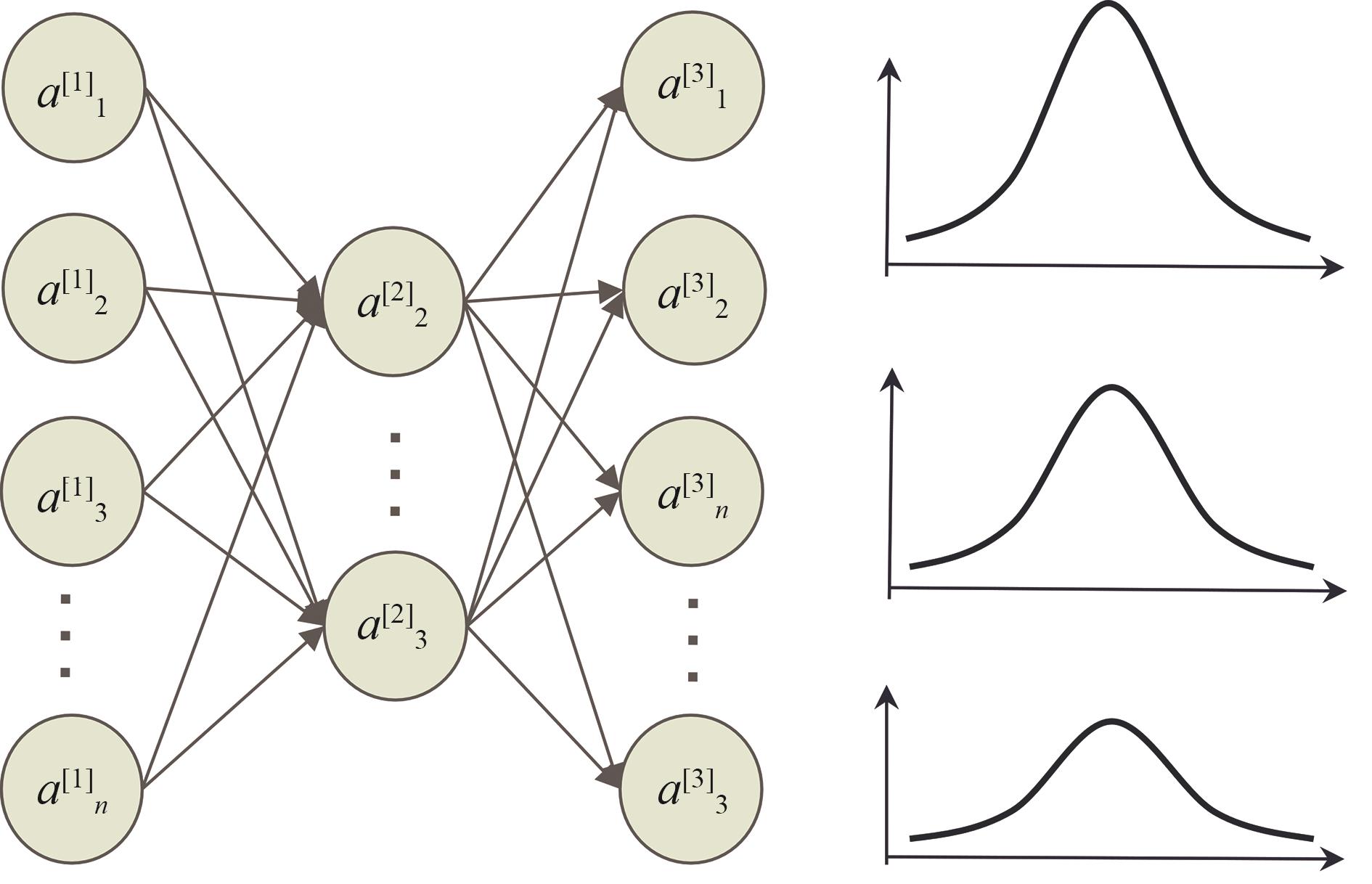

图 6
点云形状补全网络"
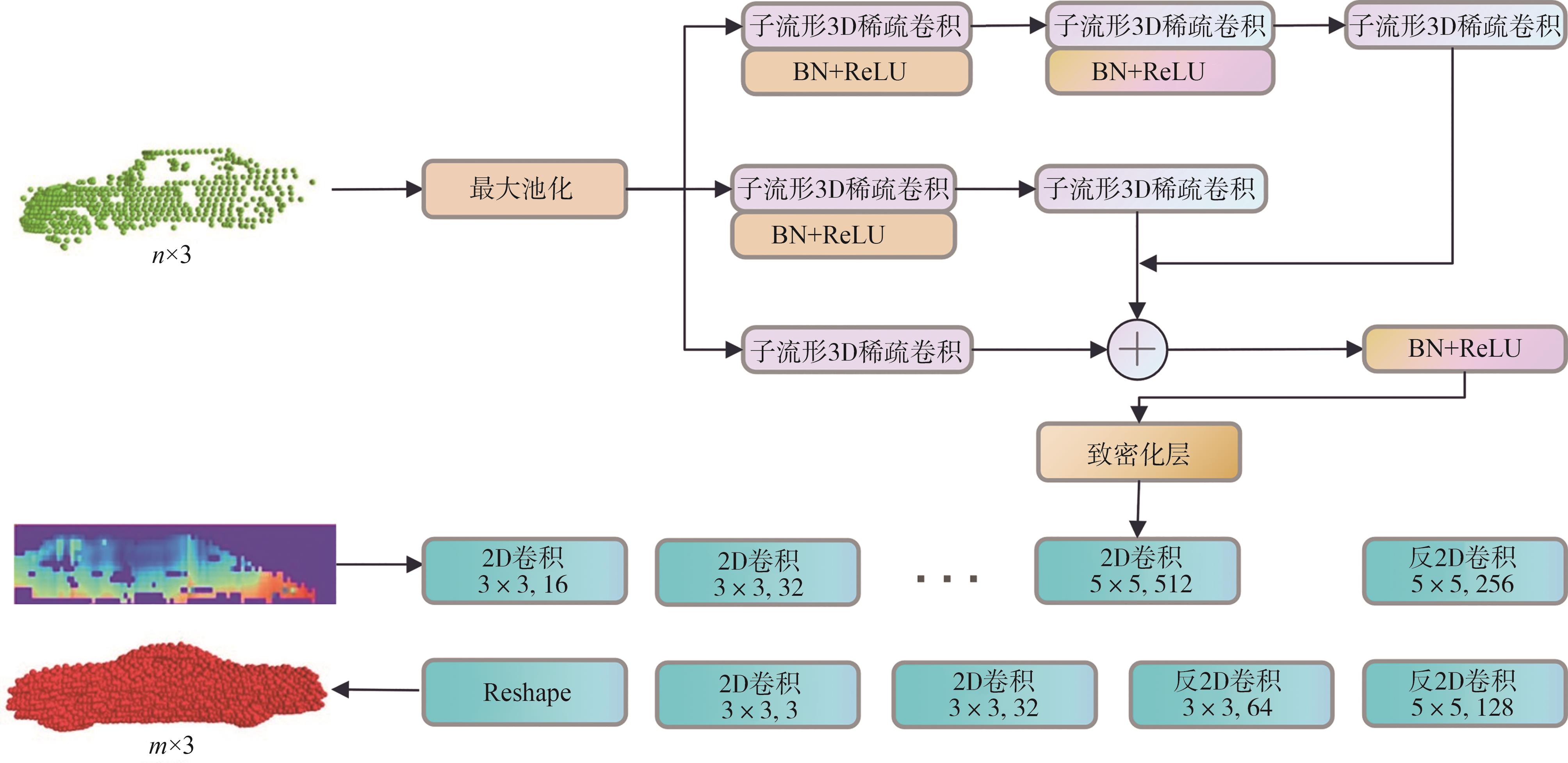

图 7
点云形状补全示意图"
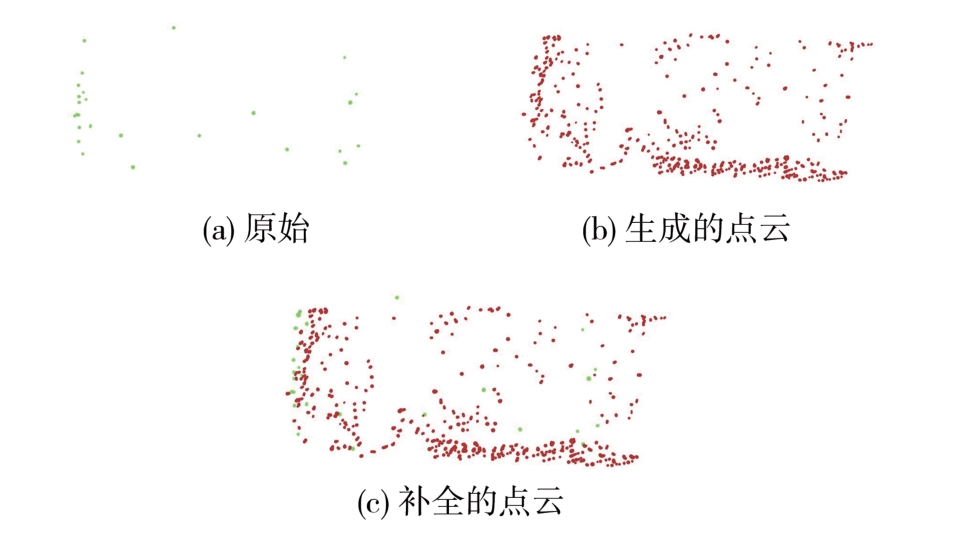
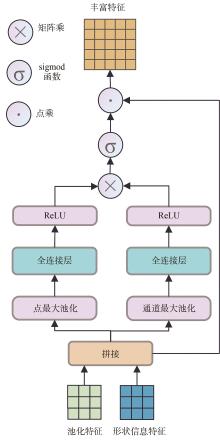
图 8
数据融合模块"
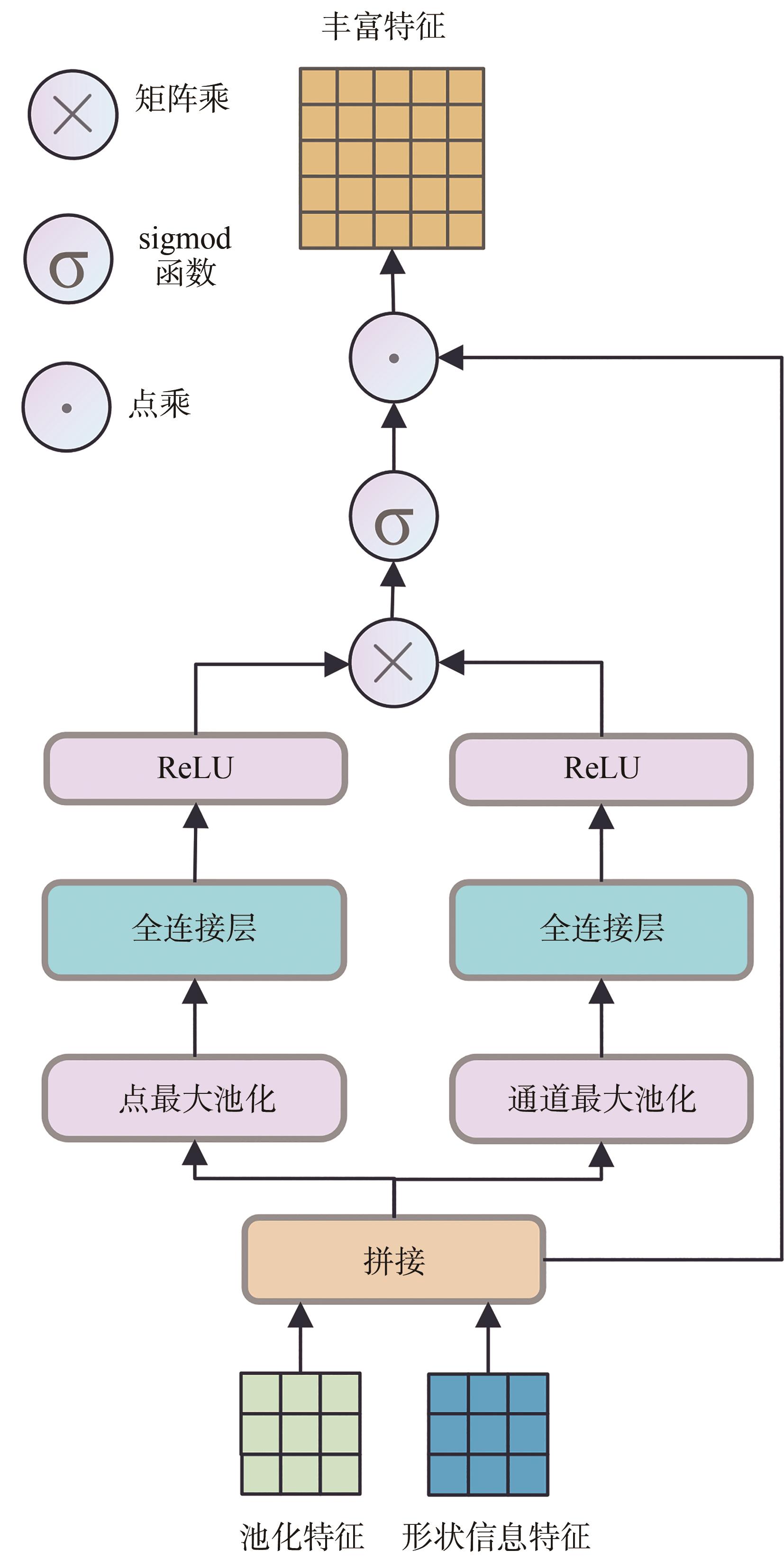
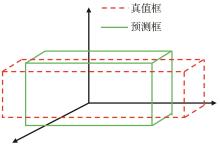
图 9
计算 IoU Loss 时坐标系转换后的结果"
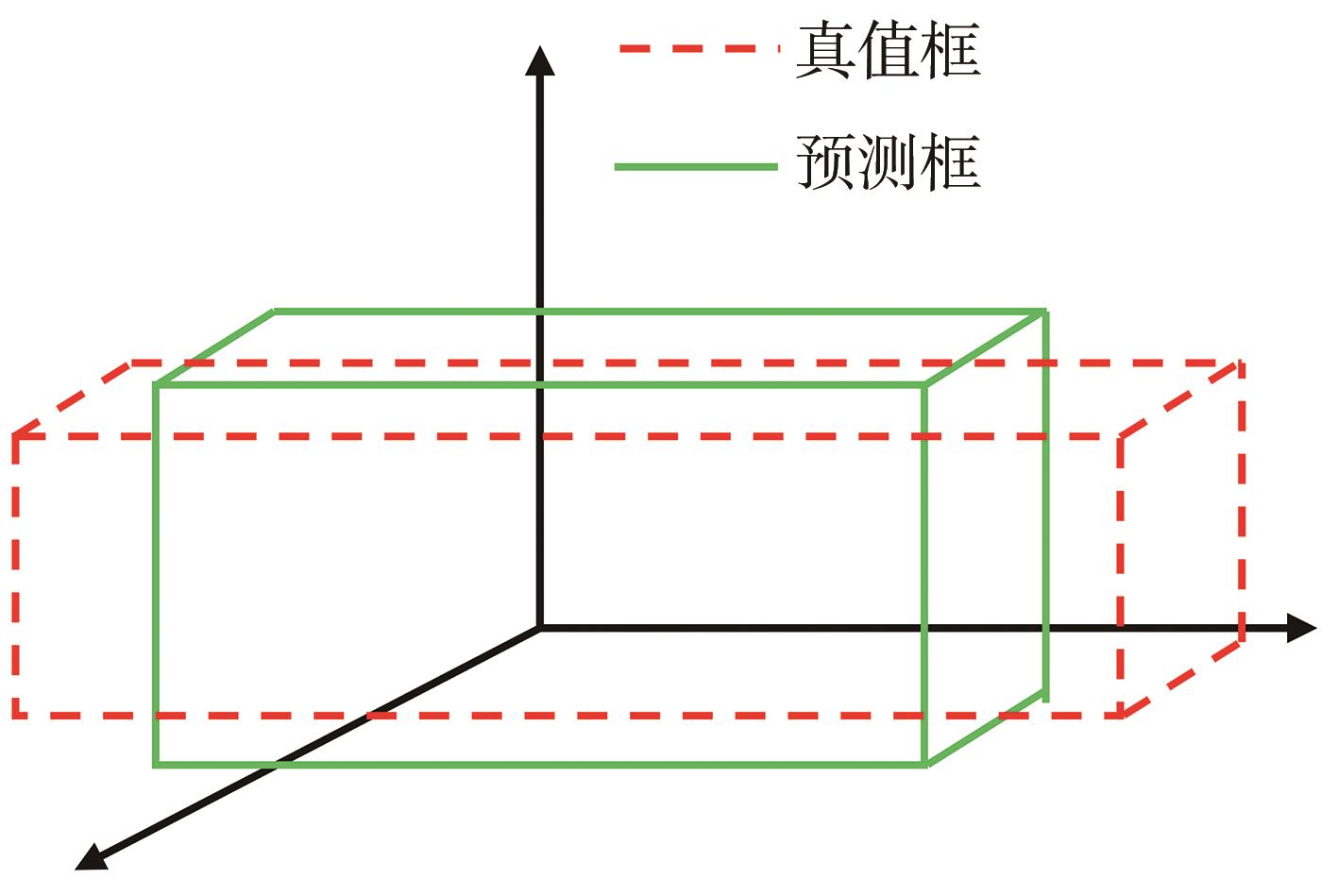
表 1
汽车与行人类别标签数量"
| 标签 | 总数 | 已停车 | 已停止 | 正在移动 |
|---|---|---|---|---|
| 汽车 | 281 941 | 193 246 | 18 002 | 70 693 |
| 标签 | 总数 | 成年人 | 儿童 | |
| 行人 | 62 851 | 61 664 | 1 187 |
表2
不同降雪量下的雪花噪声统计"
| 距离/m | [ 0, 5 ] | [ | [ | [ |
|---|---|---|---|---|
| 正常天气 | 15 | 139 | 15 | 3 |
| 小雪天气 | 30 | 138 | 49 | 2 |
| 中雪天气 | 45 | 2 001 | 713 | 77 |
| 大雪天气 | 607 | 2 658 | 43 | 6 |
表3
CADC测试集上对汽车的检测性能"
| 方法 | 范式 | Car AP3D | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Point pillars | 体素 | 78.23% | 67.93% | 67.91% |
| Second | 体素 | 74.91% | 65.08% | 64.97% |
| SE-SSD | 体素 | 75.74% | 68.90% | 64.27% |
Voxel R-CNN | 体素 | 80.22% | 77.20% | 76.26% |
| BtcDet | 体素 | 79.98% | 73.37% | 68.88% |
| IA-SSD | 点 | 72.94% | 64.81% | 60.59% |
| Ours | 体素 | 80.75% | 75.43% | 72.59% |
表 4
CADC测试集上对行人的检测性能"
| 方法 | 范式 | Pedestrian AP3D | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Pointpillars | 体素 | 51.12% | 48.04% | 43.09% |
| Second | 体素 | 53.32% | 49.49% | 42.77% |
| SE-SSD | 体素 | 52.08% | 47.61% | 42.99% |
| Voxel R-CNN | 体素 | 50.13% | 45.74% | 42.60% |
| BtcDet | 体素 | 51.97% | 46.60% | 43.23% |
| IA-SSD | 点 | 49.48% | 44.64% | 40.06% |
| Ours | 体素 | 54.48% | 49.33% | 47.52% |

图 10
CADC数据集检测结果图"


图 11
KITTI数据集检测结果"
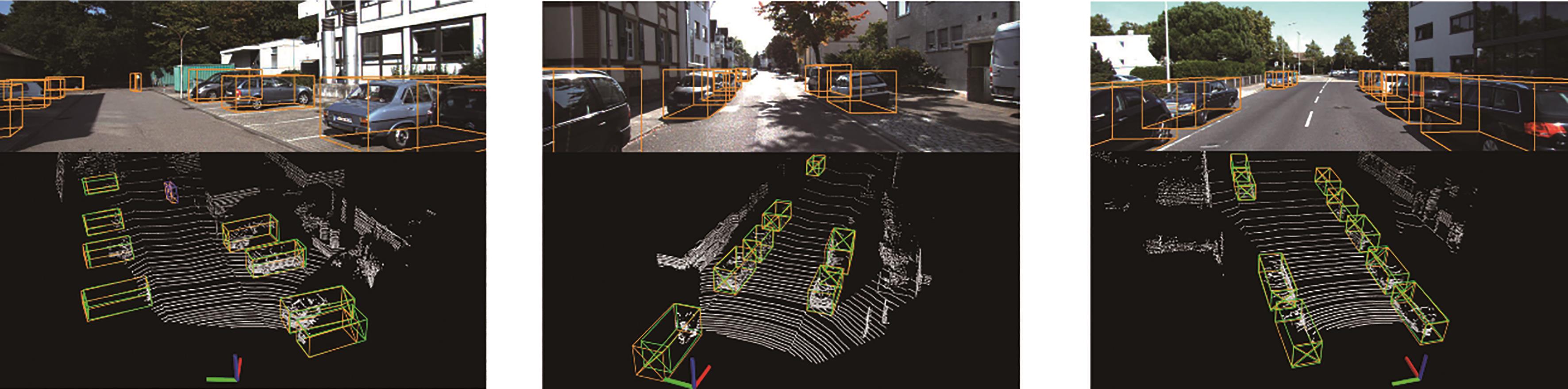
表 5
各降雪量的检测性能"
| 模型 | Normal Weather | Light Snowy | Medium Snowy | Heavy Snowy |
|---|---|---|---|---|
| Baseline | 87.76% | 78.05% | 65.12% | 56.65% |
| Ours | 89.49% | 79.33% | 67.32% | 58.70% |
| 提升 | +1.73% | +1.28% | +2.20% | +2.05% |
表6
在KITTI测试集中汽车类别的检测性能"
| 方法 | 范式 | Car 3D APR40 | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Pointpillars | 体素 | 87.75% | 78.39% | 75.18% |
| Second | 体素 | 90.97% | 79.94% | 77.09% |
| SA-SSD | 体素 | 92.23% | 84.30% | 81.36% |
| PV-RCNN | 体素 | 92.57% | 84.30% | 81.36% |
Voxel R-CNN | 体素 | 92.38% | 85.29% | 82.86% |
| SE-SSD | 体素 | 93.19% | 86.12% | 83.31% |
| BtcDet | 体素 | 93.15% | 86.28% | 83.86% |
| IA-SSD | 点 | 88.87% | 80.32% | 75.10% |
| Ours | 体素 | 93.84% | 87.94% | 86.70% |
表7
在KITTI验证集中汽车类别的检测性能"
| 方法 | 范式 | Car 3D APR40 | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Point pillars | 体素 | 82.58% | 74.31% | 68.99% |
| Second | 体素 | 83.13% | 73.66% | 66.20% |
| SA-SSD | 体素 | 88.75% | 79.79% | 74.16% |
| PV-RCNN | 体素 | 90.25% | 81.43% | 76.82% |
| Voxel R-CNN | 体素 | 90.90% | 81.62% | 77.06% |
| SE-SSD | 体素 | 91.94% | 82.54% | 77.15% |
| BtcDet | 体素 | 90.64% | 82.86% | 78.09% |
| IA-SSD | 点 | 88.87% | 80.32% | 75.10% |
| Ours | 体素 | 92.03% | 85.47% | 78.64% |
表8
LQ、PR、FR各模块于CADC的作用"
| 组件 | Car AP3D | |||||
|---|---|---|---|---|---|---|
| Baseline | LQ | PR | FR | Easy | Mod | Hard |
| √ | 79.98% | 73.37% | 68.88% | |||
| √ | √ | 80.27% | 73.68% | 70.59% | ||
| √ | √ | 80.32% | 74.66% | 71.84% | ||
| √ | √ | √ | 80.68% | 75.37% | 72.45% | |
| √ | √ | √ | √ | 80.75% | 75.43% | 72.59% |
| +0.77% | +2.06% | +3.71% | ||||
表9
LQ、PR、FR各模块于KITTI的作用"
| 组件 | Car 3D APR40 | |||||
|---|---|---|---|---|---|---|
| Baseline | LQ | PR | FR | Easy | Mod | Hard |
| √ | 93.15% | 86.28% | 83.86% | |||
| √ | √ | 93.28% | 86.83% | 84.74% | ||
| √ | √ | 93.54% | 86.99% | 85.41% | ||
| √ | √ | √ | 93.62% | 87.17% | 85.89% | |
| √ | √ | √ | √ | 93.84% | 87.94% | 86.70% |
| +0.69% | +1.66% | +2.84% | ||||
表10
PR模块在不同设置下的效果"
| 模型 | 点云数量 | 3D APR40 | ||
|---|---|---|---|---|
| Car | Pedestrian | Car | Pedestrian | |
| PR1 | 1 024 | 1 024 | 74.01% | 49.20% |
| PR2 | 16 384 | 16 384 | 74.22% | 48.56% |
| PR3 | 8 096 | 8 096 | 74.31% | 49.03% |
| PR4 | 8 096 | 1 024 | 74.32% | 49.21% |

图 12
检测结果对比"
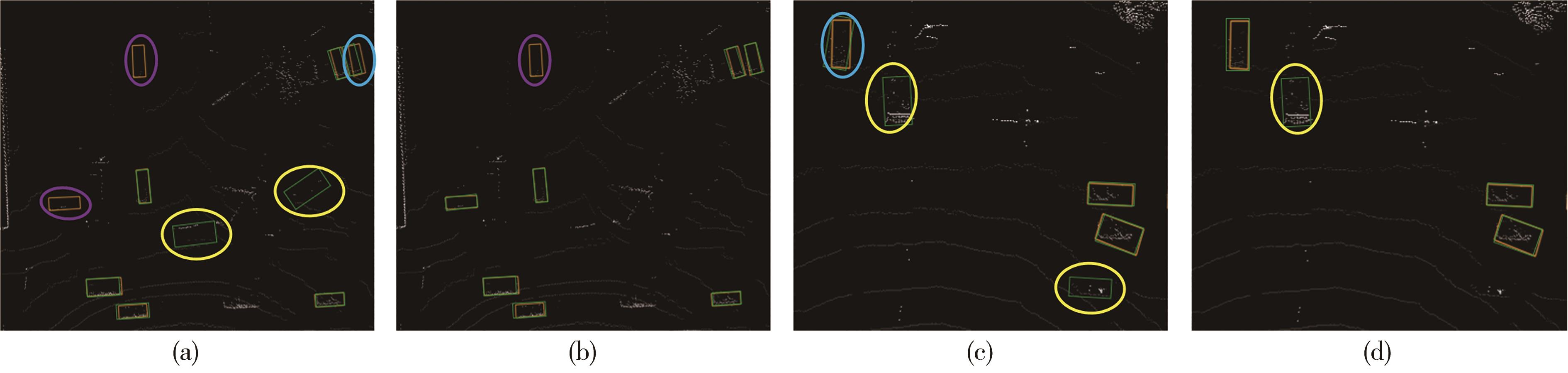
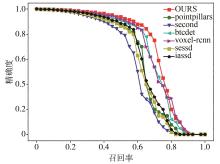
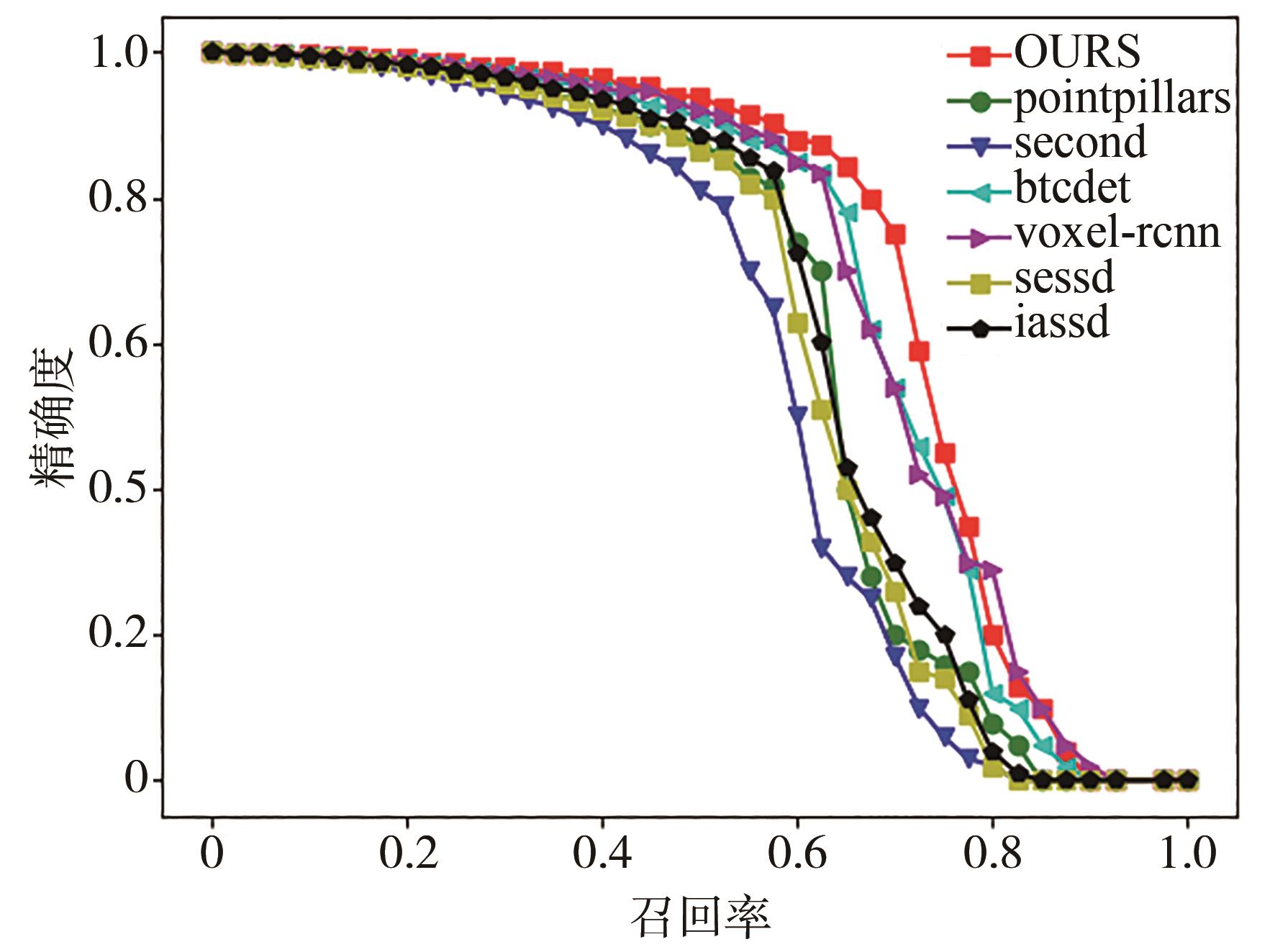
图 13
CADC数据集车辆检测结果精确度-召回率曲线对比"
| 1 | 胡杰, 安永鹏, 徐文才, 等. 基于激光点云的深度语义和位置信息融合的三维目标检测[J]. 中国激光, 2023, 50(10): 200-210. |
| HU J, AN Y, XU W, et al. 3D object detection based on deep semantics and position information fusion of laser point cloud[J]. Chinese Journal of Lasers, 2023, 50(10): 200-210. | |
| 2 | HENNING M, MÜLLER J, GIES F, et al. Situation-aware environment perception using a multi-layer attention map[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8(1): 481-491. |
| 3 | DONG Y, KANG C, ZHANG J, et al. Benchmarking robustness of 3D object detection to common corruptions[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada, 2023: 1022-1032. |
| 4 | HAHNER M, SAKARIDIS C, BIJELIC M, et al. Lidar snowfall simulation for robust 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans, LA, USA 2022: 16364-16374. |
| 5 | PIROLI A, DALLABETTA V, KOPP J, et al. Energy-based detection of adverse weather effects in lidar data[J]. IEEE Robotics and Automation Letters, 2023. |
| 6 | DREISSIG M, SCHEUBLE D, PIEWAK F, et al. Survey on LiDAR perception in adverse weather conditions[J]. arXiv 2023. arXiv preprint arXiv:. |
| 7 | HE C, LI R, ZHANG Y, et al. MSF: motion-guided sequential fusion for efficient 3D object detection from point cloud sequences[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada, 2023: 5196-5205. |
| 8 | LI Y, QI C R, ZHOU Y, et al. MoDAR: using motion forecasting for 3D object detection in point cloud sequences[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada, 2023: 9329-9339. |
| 9 | SHI S, JIANG L, DENG J, et al. PV-RCNN++: point-voxel feature set abstraction with local vector representation for 3D object detection[J]. International Journal of Computer Vision, Vancouver, Canada,2023, 131(2): 531-551. |
| 10 | SHI G, LI R, MA C. PillarNet: real-time and high-performance pillar-based 3D object detection[C]. European Conference on Computer Vision. Cham: Springer Nature Switzerland, Tel Aviv, Israel, 2022: 35-52. |
| 11 | PIROLI A, DALLABETTA V, KOPP J, et al. Towards robust 3D object detection in rainy conditions[C]. 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). Bilbao, Spain,2023: 3471-3477. |
| 12 | RUSU R B, COUSINS S. 3D is here: point cloud library (pcl)[C]. 2011 IEEE International Conference on Robotics and Automation. IEEE, 2011: 1-4. |
| 13 | BALTA H, VELAGIC J, BOSSCHAERTS W, et al. Fast statistical outlier removal based method for large 3D point clouds of outdoor environments[J]. IFAC-PapersOnLine, 2018, 51(22): 348-353. |
| 14 | HAN X F, JIN J S, WANG M J, et al. A review of algorithms for filtering the 3D point cloud[J]. Signal Processing: Image Communication, 2017, 57: 103-112. |
| 15 | PARK J I, PARK J, KIM K S. Fast and accurate desnowing algorithm for LiDAR point clouds[J]. IEEE Access, 2020, 8: 160202-160212. |
| 16 | HEINZLER R, PIEWAK F, SCHINDLER P, et al. CNN-based lidar point cloud de-noising in adverse weather[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2514-2521. |
| 17 | 陈熙源,戈明明,姚志婷,等.雨雪天气下的激光雷达滤波算法研究[J].仪器仪表学报,2023,44(7):172-181. |
| CHEN Xiyuan, GE Mingming, YAO Zhiting, et al. Research on LiDAR filtering algorithm in rainy and snowy weather[J]. Chinese Journal of Scientific Instrument, 2023, 44(7): 172-181. | |
| 18 | LIN J, YIN H, YAN J, et al. Improved 3D object detector under snowfall weather condition based on lidar point cloud[J]. IEEE Sensors Journal, 2022, 22(16): 16276-16292. |
| 19 | HEINZLER R, PIEWAK F, SCHINDLER P, et al.CNN-based lidar point cloud de-noising in adverse weather[J].IEEE Robotics and Automation Letters,2020,5(2):2514-2521. |
| 20 | XU Q, ZHOU Y, WANG W, et al. SPG: unsupervised domain adaptation for 3D object detection via semantic point generation[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 15446-15456. |
| 21 | LI G, LI J, WANG C, et al. Key supplement: improving 3D car detection with pseudo point cloud[J]. IEEE Sensors Journal, 2023. |
| 22 | XU Q, ZHONG Y, NEUMANN U. Behind the curtain: learning occluded shapes for 3D object detection[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(3): 2893-2901. |
| 23 | 程腾,倪昊,张强,等.基于虚拟点云的二阶段多模态融合网络[J].汽车工程,2024,46(2):222-229. |
| CHENG Teng, NI Hao, ZHANG Qiang, et al. Two-stage multimodal fusion network based on virtual point cloud[J]. Automotive Engineering, 2024, 46(2): 222-229. | |
| 24 | 金立生,张洪瑜,郭柏苍.基于特征增稳的混合固态激光雷达目标检测[J].汽车工程,2024,46(6):1015-1024. |
| JIN Lisheng, ZHANG Hongyu, GUO Baicang. Hybrid solid-state lidar target detection based on feature augmentation[J]. Automotive Engineering, 2024, 46(6): 1015-1024. | |
| 25 | 金宇锋,陶重犇.基于Transformer的融合信息增强3D目标检测算法[J].仪器仪表学报,2023,44(12):297-306. |
| JIN Yufeng, TAO Chongben. Transformer-based fusion information enhanced 3D target detection algorithm [J]. Journal of Instrumentation, 2023, 44(12): 297-306. | |
| 26 | PITROPOV M, GARCIA D E, REBELLO J, et al. Canadian adverse driving conditions dataset[J]. The International Journal of Robotics Research, 2021, 40(4-5): 681-690. |
| 27 | OGUCHI T. Electromagnetic wave propagation and scattering in rain and other hydrometeors[J]. Proceedings of the IEEE, 1983, 71(9): 1029-1078. |
| 28 | HAHNER M, SAKARIDIS C, BIJELIC M, et al. Lidar snowfall simulation for robust 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 16364-16374. |
| 29 | ZHANG C, HUANG Z, ANG M H, et al. Lidar degradation quantification for autonomous driving in rain[C]. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021: 3458-3464. |
| 30 | ZHANG C, HUANG Z, TUNG B X L, et al. SmartRainNet: uncertainty estimation for laser measurement in rain[C]. 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023: 10567-10573. |
| 31 | GUIZILINI V, AMBRUS R, BURGARD W, et al. Sparse auxiliary networks for unified monocular depth prediction and completion[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 11078-11088. |
| 32 | YUAN W, KHOT T, HELD D, et al. PCN: point completion network[C]. 2018 International Conference on 3D Vision (3DV). IEEE, 2018: 728-737. |
| 33 | YAN Y, MAO Y, LI B. SECOND: sparsely embedded convolutional detection[J]. Sensors, 2018, 18(10): 3337. |
| 34 | SHI S, GUO C, JIANG L, et al. PV-RCNN: point-voxel feature set abstraction for 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 10529-10538. |
| [1] | 王明辰,王海,蔡英凤,陈龙,李祎承. MSF-Diffuser:BEV下基于扩散模型的多传感器自适应融合自动驾驶方法[J]. 汽车工程, 2025, 47(6): 1122-1132. |
| [2] | 刘宸宇,王海,蔡英凤,陈龙. 面向自动驾驶道路场景的相机与毫米波融合的多目标检测算法[J]. 汽车工程, 2025, 47(5): 829-838. |
| [3] | 秦启瑞,王海,蔡英凤,陈龙,李祎承. 基于实例激活图的自动驾驶实时实例分割算法[J]. 汽车工程, 2025, 47(4): 614-624. |
| [4] | 索锦辉, 王晓伟, 蒋沛文, 丁驰, 高铭, 边有钢. 基于多粒度关系推理的自动驾驶域自适应视觉目标检测算法[J]. 汽车工程, 2025, 47(2): 201-210. |
| [5] | 朱冰,贾士政,赵健,韩嘉懿,张培兴,宋东鉴,陈志成. 考虑主观认知的自动驾驶汽车序贯博弈类人决策[J]. 汽车工程, 2025, 47(1): 13-22. |
| [6] | 李江坤,纵瑞雪,邓伟文,王莹,丁娟. 基于有向图的城市交叉口场景相似性评价方法[J]. 汽车工程, 2025, 47(1): 23-34. |
| [7] | 陈鹏,蔡英凤,原海波,陈龙,孙晓强. 基于二型模糊逻辑控制的半挂车轨迹跟踪研究[J]. 汽车工程, 2025, 47(1): 55-66. |
| [8] | 李道飞,潘豪. 场景复杂度评估在轨迹预测和驾驶决策中的应用[J]. 汽车工程, 2024, 46(9): 1556-1563. |
| [9] | 朱冰,范天昕,赵健,张培兴,宋东鉴,薛越,赵文博. 自动驾驶拟人连续交互测试场景生成方法[J]. 汽车工程, 2024, 46(9): 1600-1607. |
| [10] | 王海,李建国,蔡英凤,陈龙. 基于激光雷达点云的动态驾驶场景多任务分割网络[J]. 汽车工程, 2024, 46(9): 1608-1616. |
| [11] | 张国娟,胡宏宇,李浩淼,王明剑,高菲,高镇海. 自动驾驶车辆乘坐舒适性评价研究综述[J]. 汽车工程, 2024, 46(9): 1617-1627. |
| [12] | 张佳楠,胡钊政,孟杰,胡华桦,左洁. 面向车-路-图协同的分布式自动驾驶仿真平台架构及应用[J]. 汽车工程, 2024, 46(8): 1335-1345. |
| [13] | 颜伏伍,向博文,胡杰,陈锐鹏,张志豪,刘昊岩,高宠智. 基于改进LPV模型的自动驾驶轻型货车横向控制[J]. 汽车工程, 2024, 46(8): 1403-1413. |
| [14] | 陶乐,王海,蔡英凤,陈龙. 面向自动驾驶场景的多目标点云检测算法[J]. 汽车工程, 2024, 46(7): 1208-1218. |
| [15] | 李琳辉,付一帆,王霆,王雪成,连静. 引入自监督预训练的轨迹预测方法[J]. 汽车工程, 2024, 46(7): 1219-1227. |
|
||