汽车工程 ›› 2025, Vol. 47 ›› Issue (6): 1122-1132.doi: 10.19562/j.chinasae.qcgc.2025.06.011
• • 上一篇
王明辰1,王海1( ),蔡英凤2,陈龙2,李祎承2
),蔡英凤2,陈龙2,李祎承2
Mingchen Wang1,Hai Wang1(),Yingfeng Cai2,Long Chen2,Yicheng Li2
摘要:
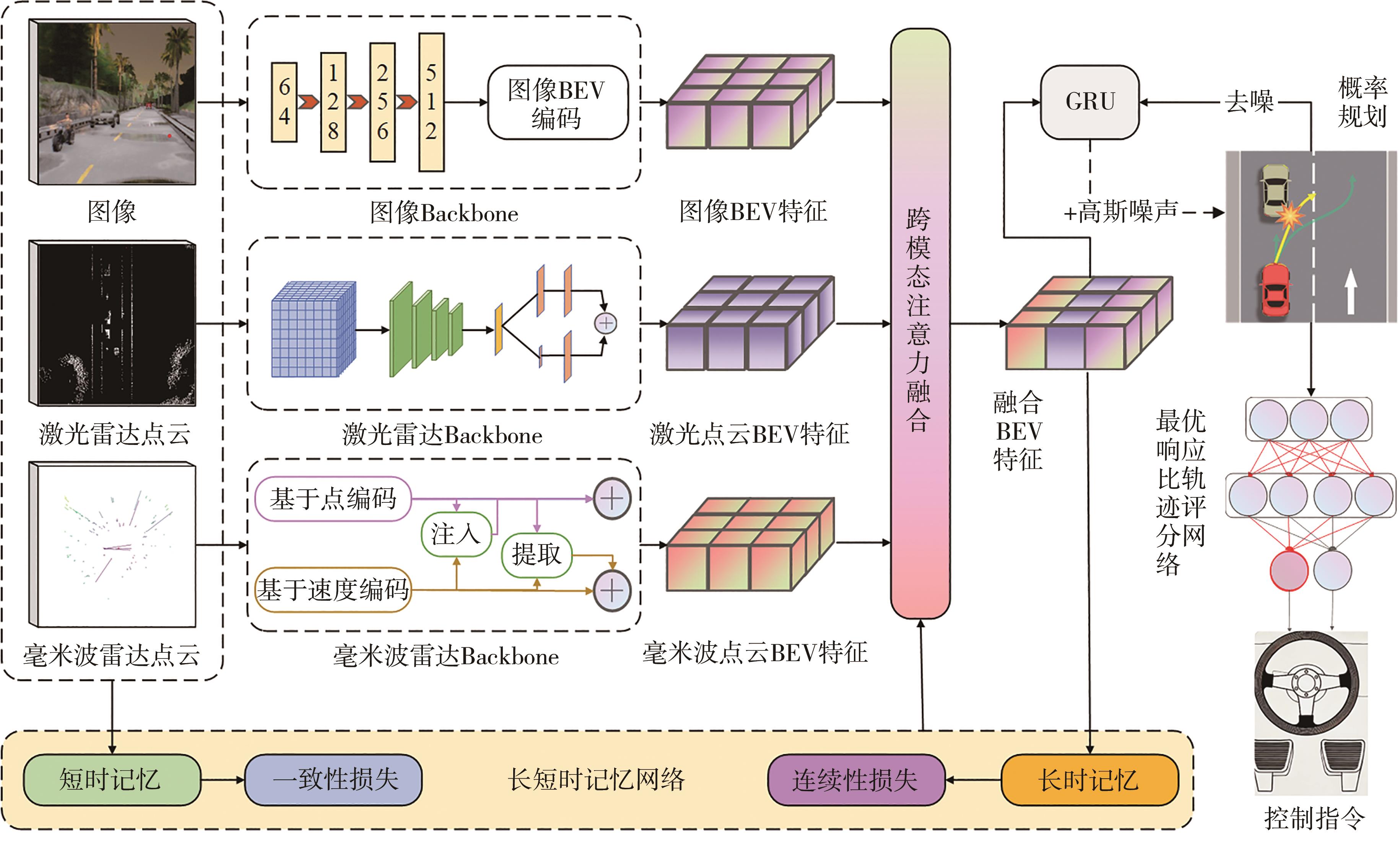
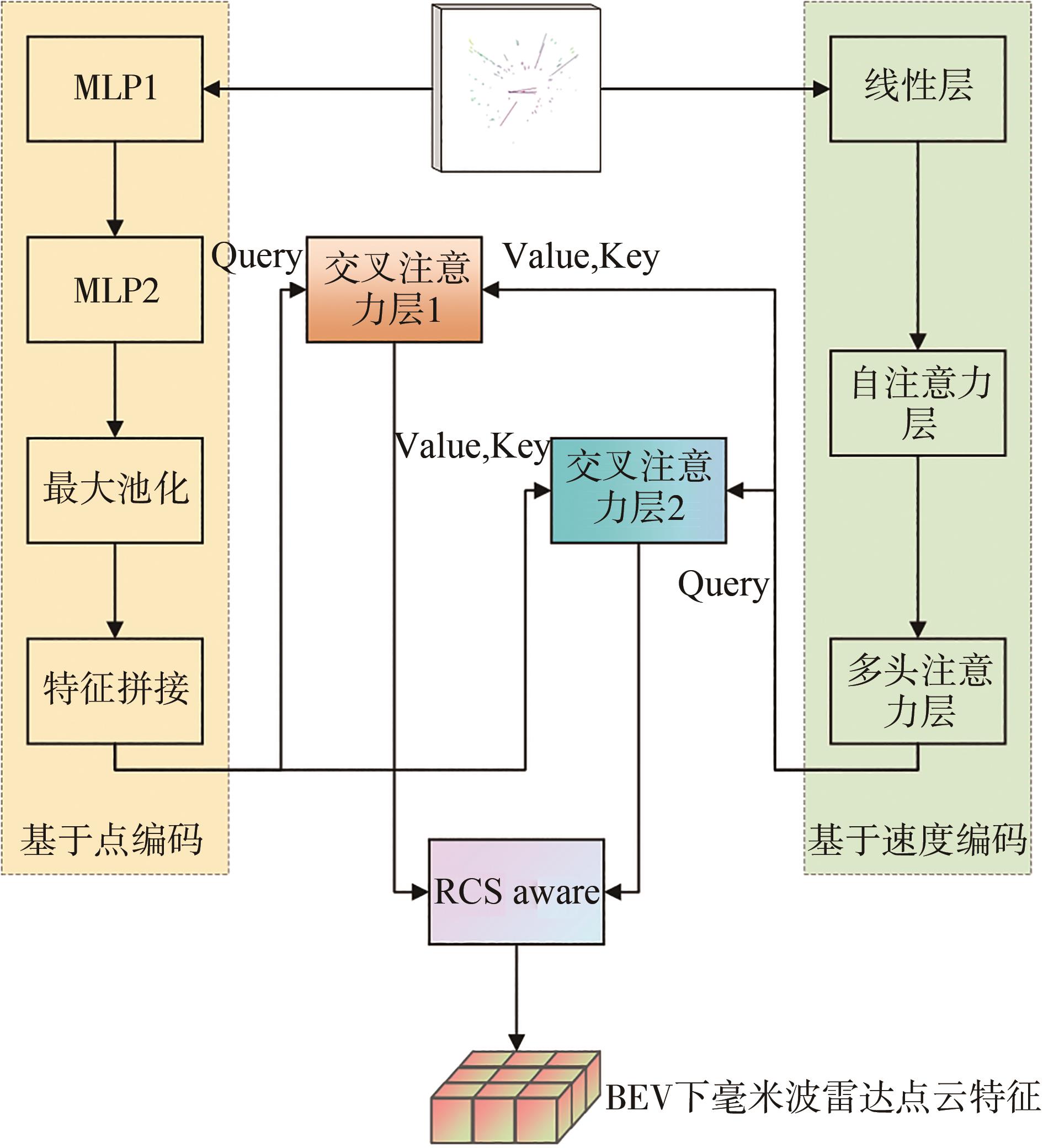
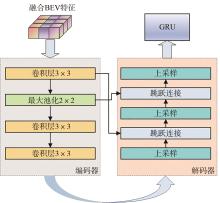
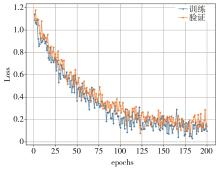
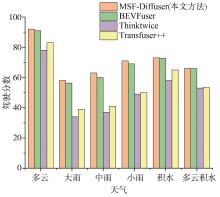
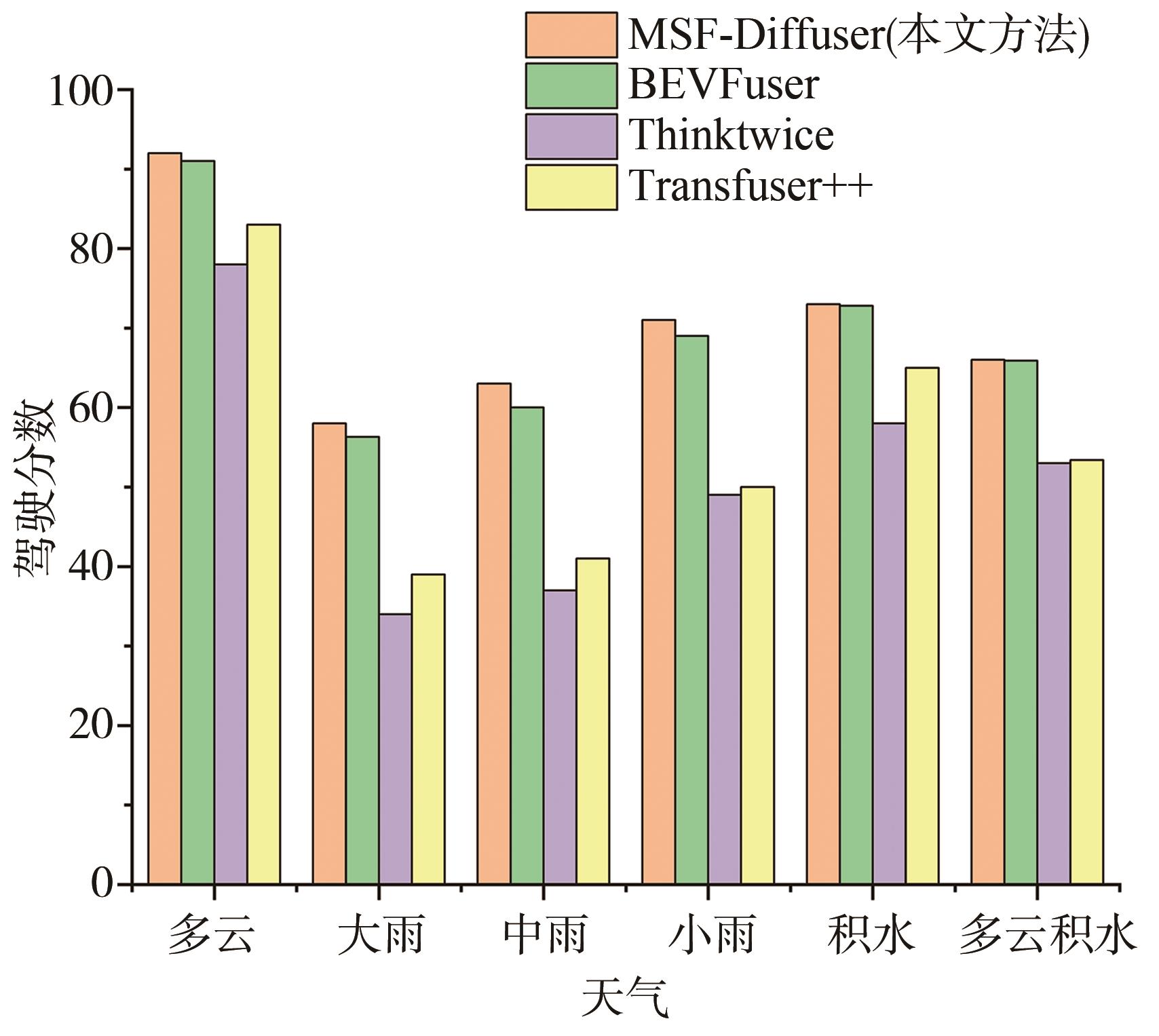
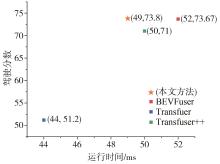
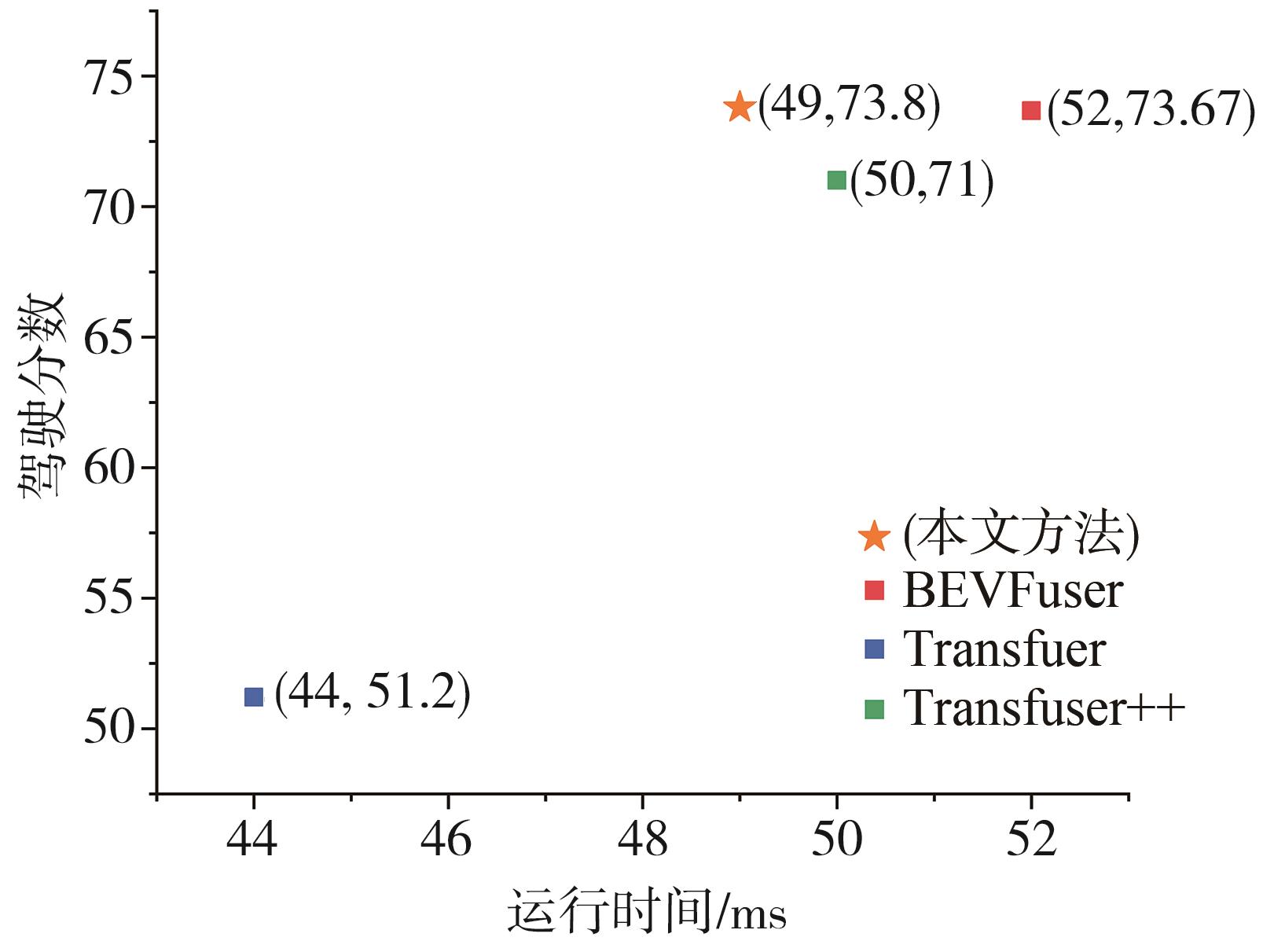
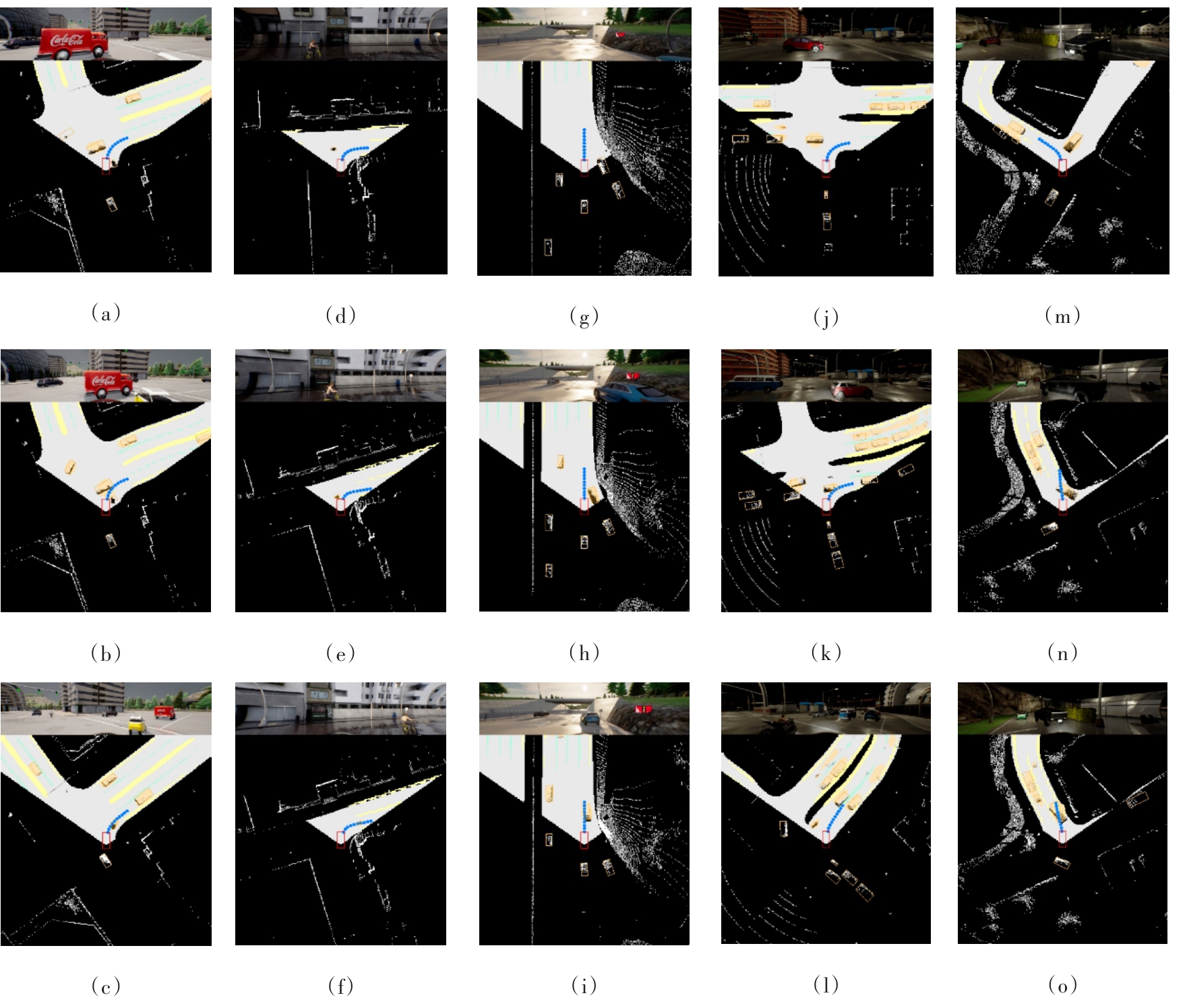
自动驾驶算法是当前智能汽车的主要研究内容。目前,为了实现全景自动驾驶,国内大多采用多传感器融合的方式。然而现有的方案都存在对传感器利用率低、融合策略不合理等问题。针对这些问题,本文提出了一种BEV下基于多传感器(视觉+激光雷达+毫米波雷达)融合的自动驾驶框架。在该框架中,采用基于点和速度双重编码并进行特征交互来提取毫米波雷达点云特征,提高了毫米波雷达信息的利用率,并更加便于进行后续的融合。在融合模块,本文使用LSTM存储多模态传感器的特征以及融合后的BEV特征,从而计算不同模态传感器特征之间的一致性损失和融合BEV特征与历史帧的连续性损失,使特征融合更为平滑、精准。最后,引入扩散模型,并提出Multi-modal U-Net进行降噪,提高了模型规划轨迹的鲁棒性。本文使用CARLA模拟器,在最具权威的Longest-06基准和Town-05 Long基准上进行了广泛的实验,分别取得了73.80