汽车工程 ›› 2022, Vol. 44 ›› Issue (2): 179-189.doi: 10.19562/j.chinasae.qcgc.2022.02.004
所属专题: 智能网联汽车技术专题-规划&控制2022年
赵菲1,王建1,张天雷1,2,王里2( ),李德毅1,3
),李德毅1,3
Fei Zhao1,Jian Wang1,Tianlei Zhang1,2,Li Wang2(),Deyi Li1,3
摘要:
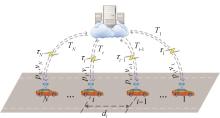
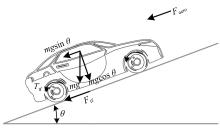
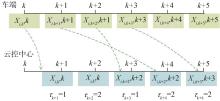
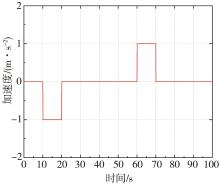
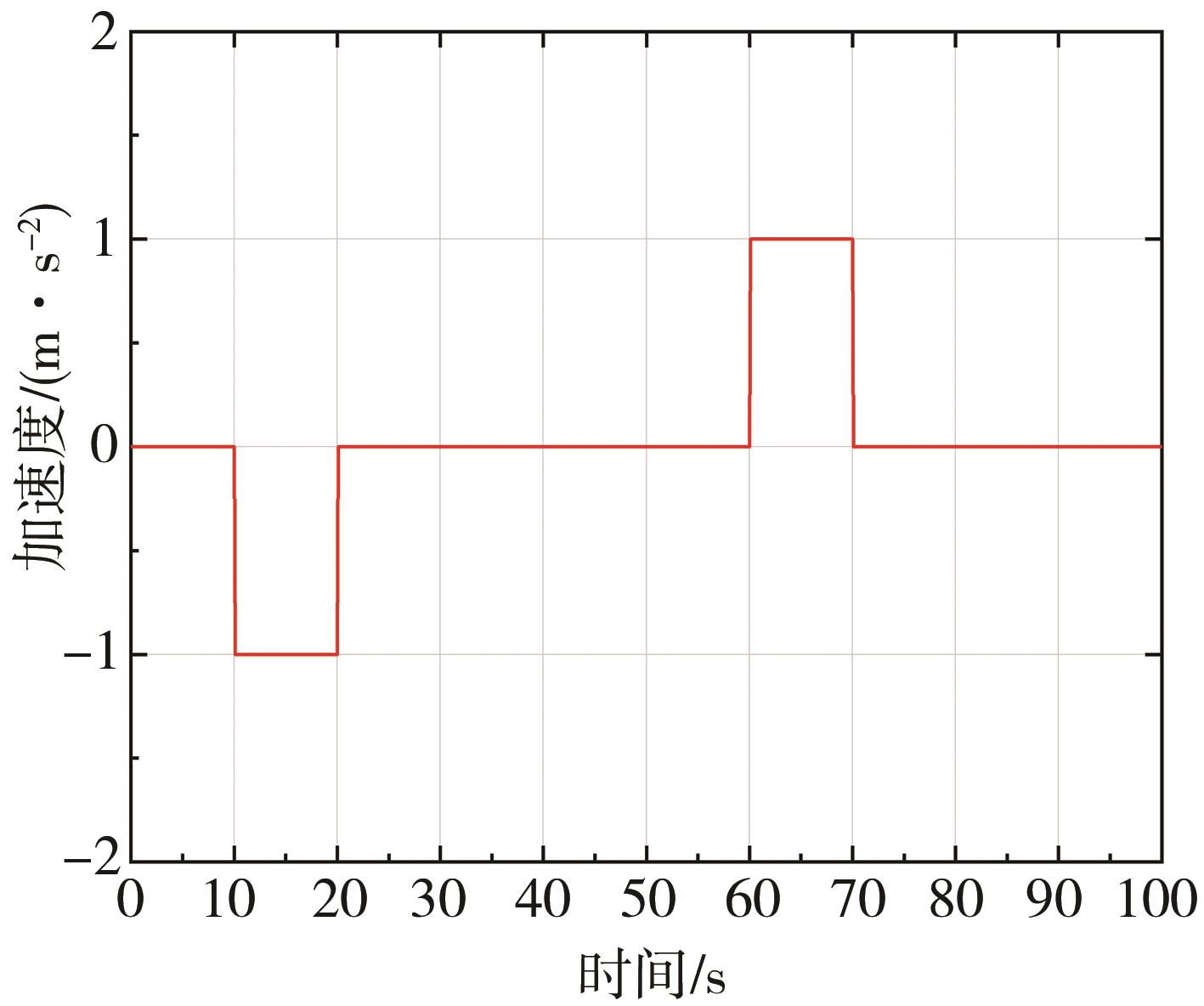
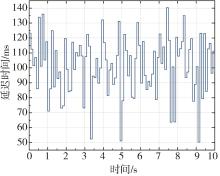
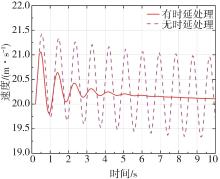
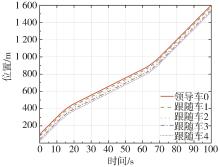
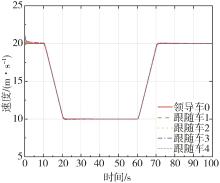
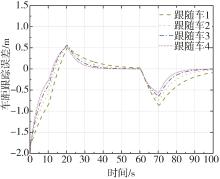
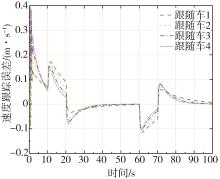
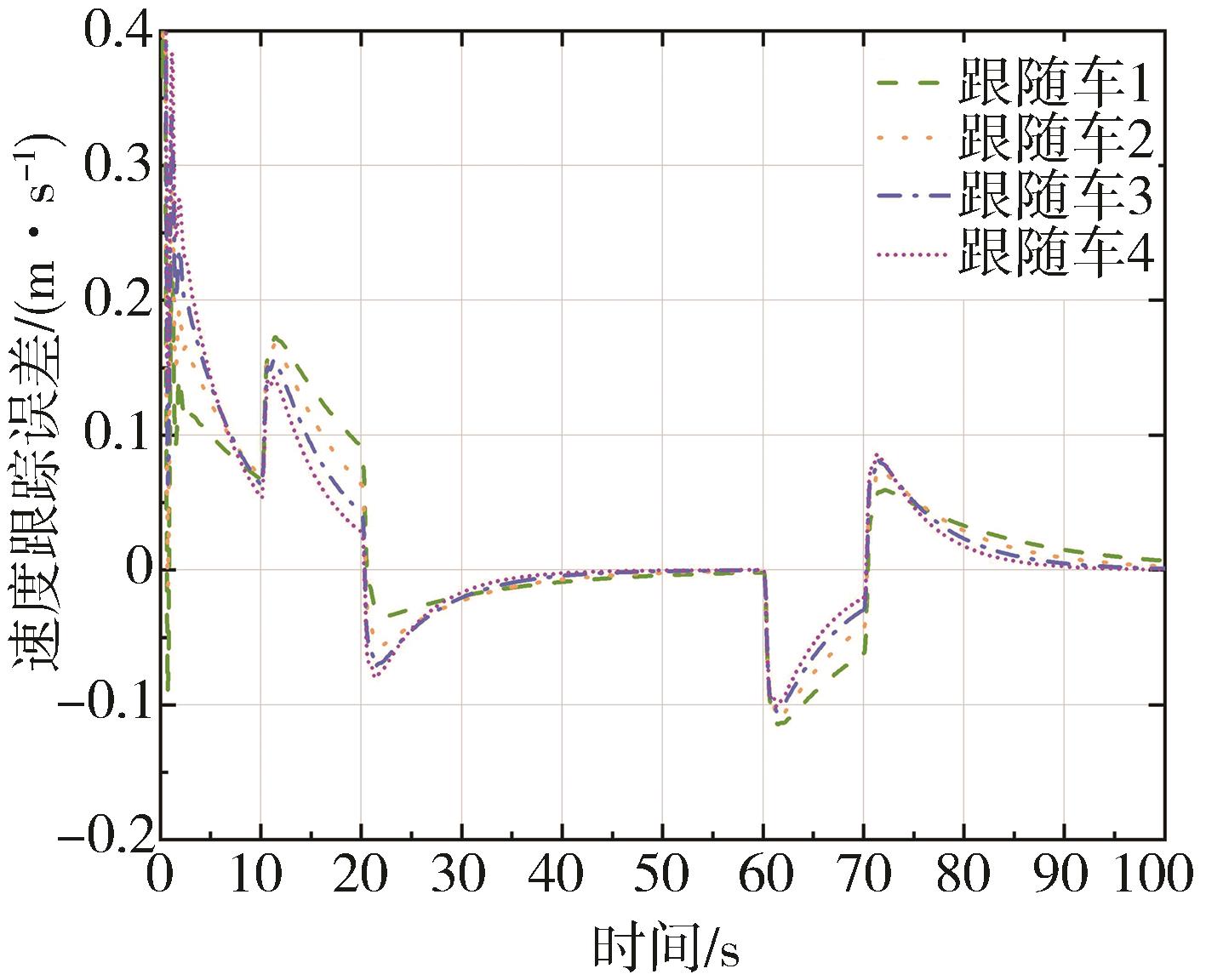
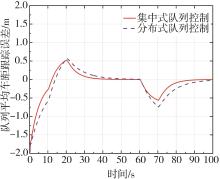
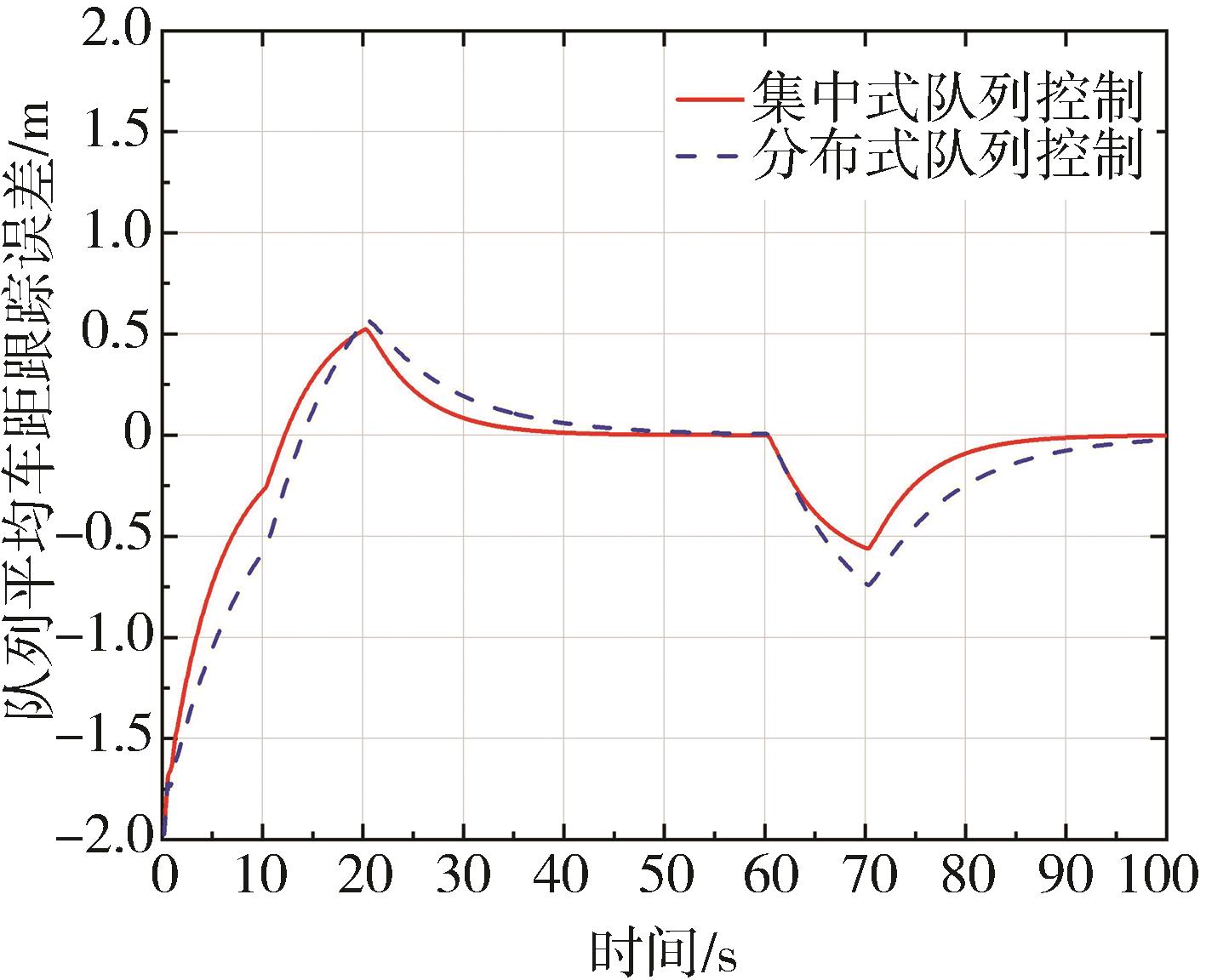
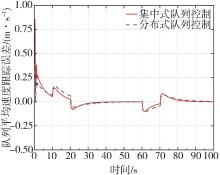
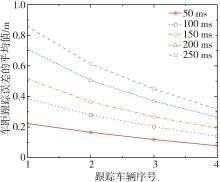
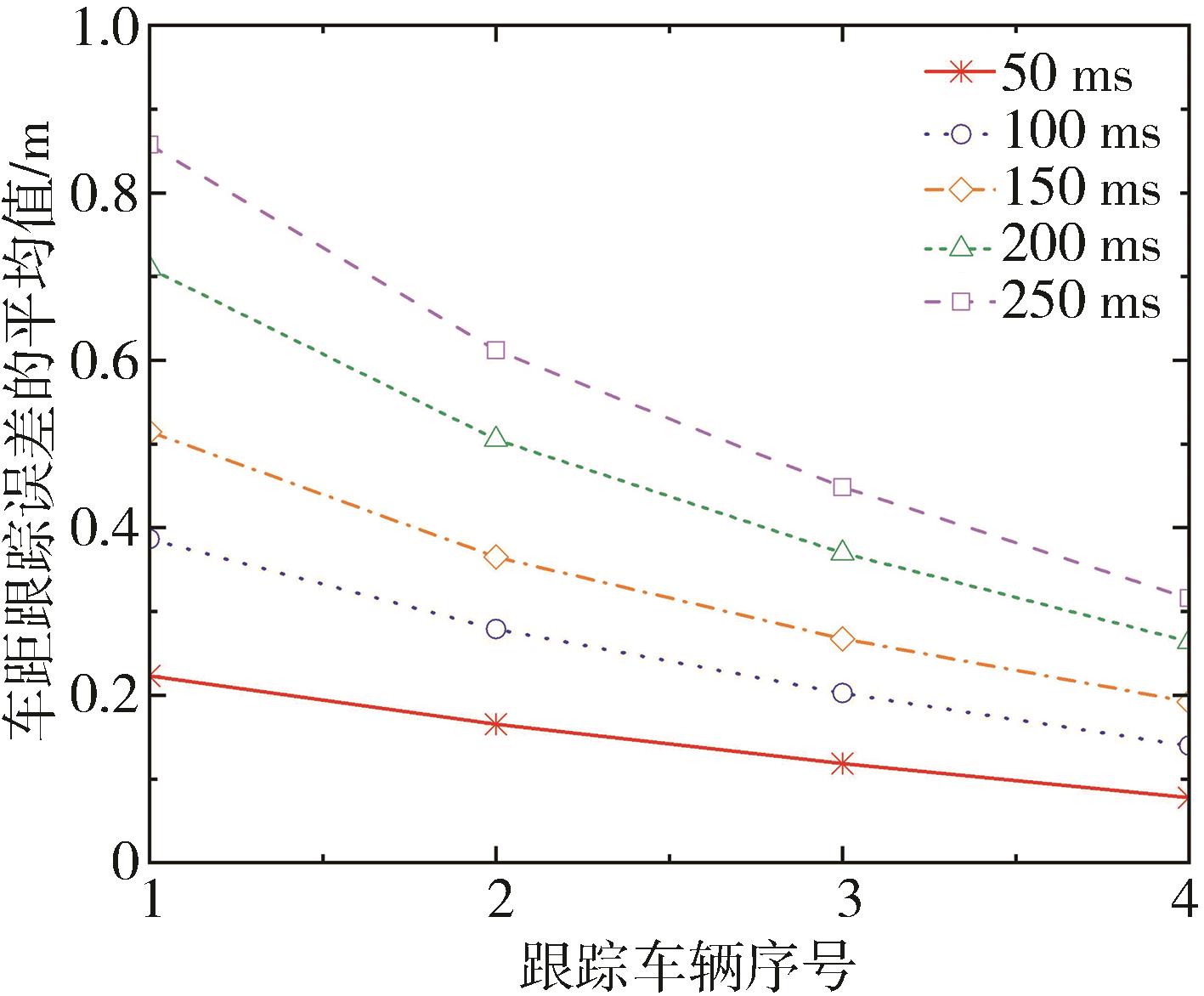
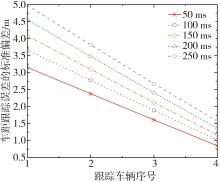
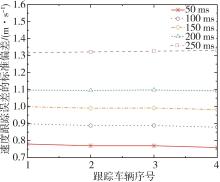
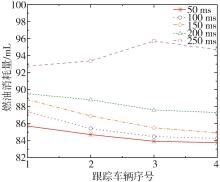
鉴于采用边缘云进行集中式车辆队列控制时,通信时延将会降低队列控制性能指标甚至导致队列失稳,本文在考虑通信时延和车辆纵向非线性动力学特性前提下,从包括队列能效的多目标优化出发,提出了一种基于边缘云的队列集中式模型预测控制算法,并设计了一种时延补偿方法。首先分析了控制算法的渐进稳定性;然后通过不同时延下的仿真试验对控制算法的串稳定性和随机时延补偿方法在一定时延范围的有效性进行了验证;最后,分析了时延对队列稳定性和燃料消耗的影响。结果表明,随着时延增大,队列稳定性和燃料经济性变差,当时延均值为250 ms且时延抖动20%时,队列处于失稳的边缘。