汽车工程 ›› 2025, Vol. 47 ›› Issue (9): 1647-1654.doi: 10.19562/j.chinasae.qcgc.2025.09.001
• •
管欣,李思深,贾鑫( )
)
Xin Guan,Sishen Li,Xin Jia()
摘要:
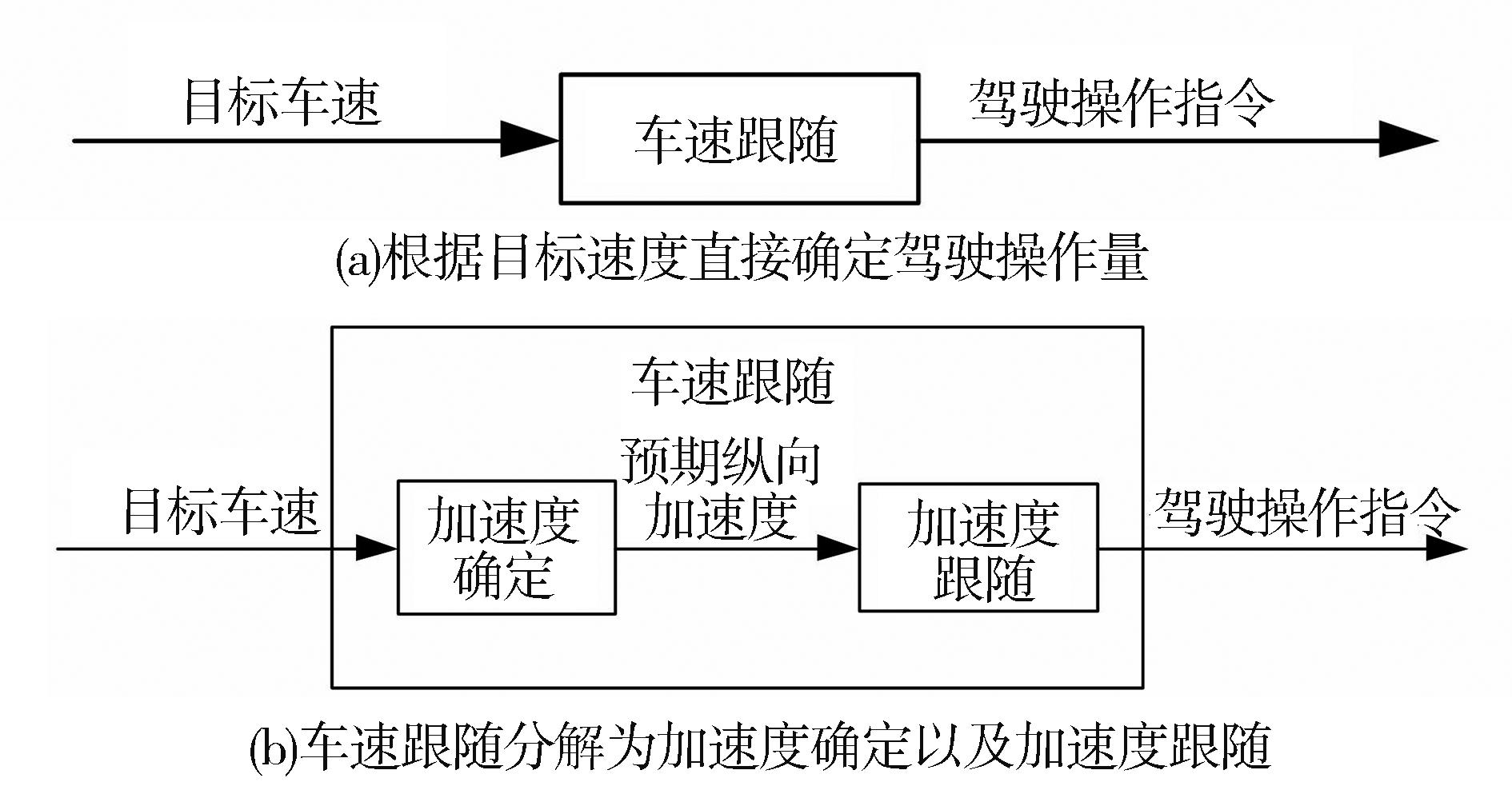
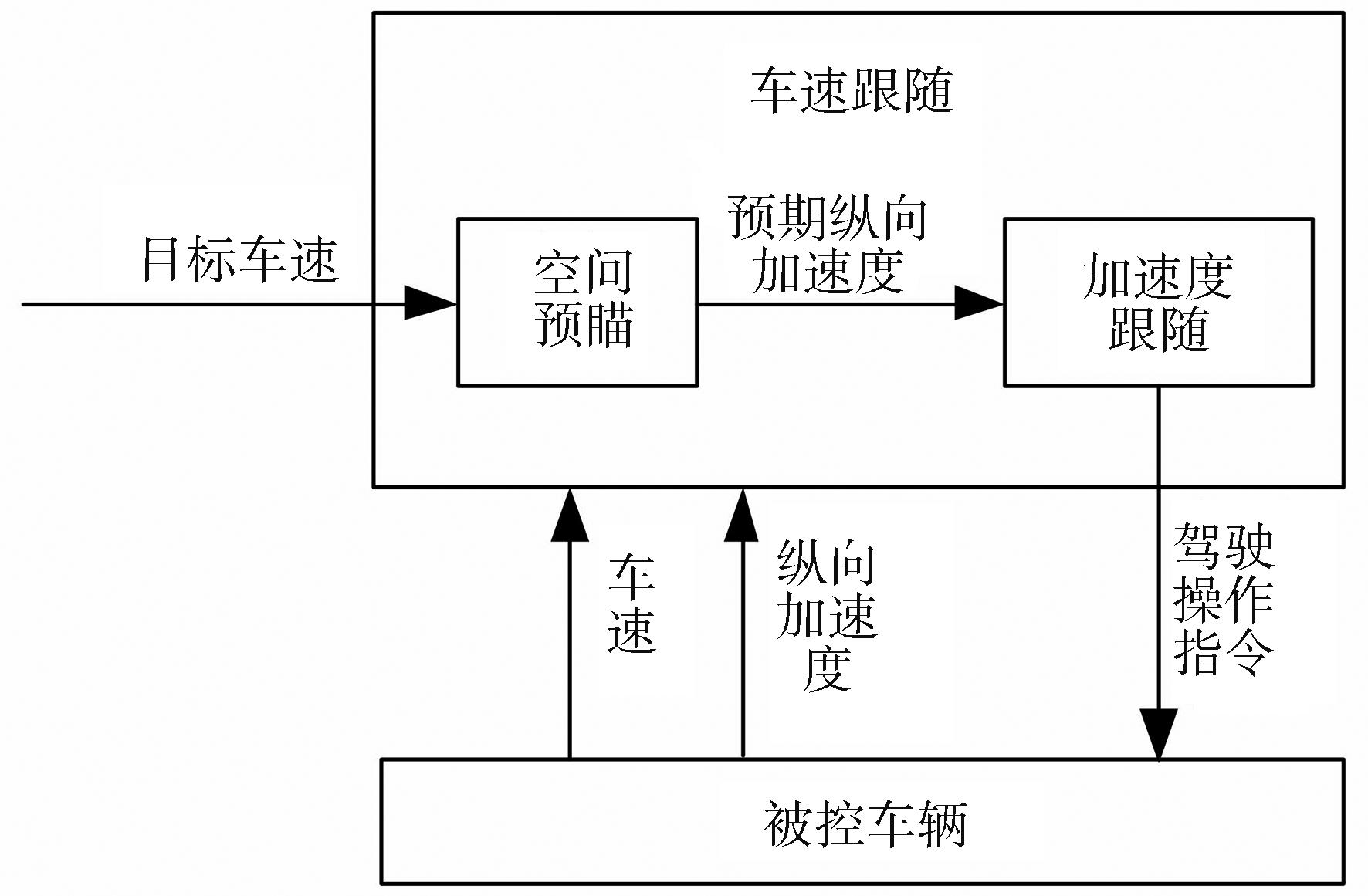
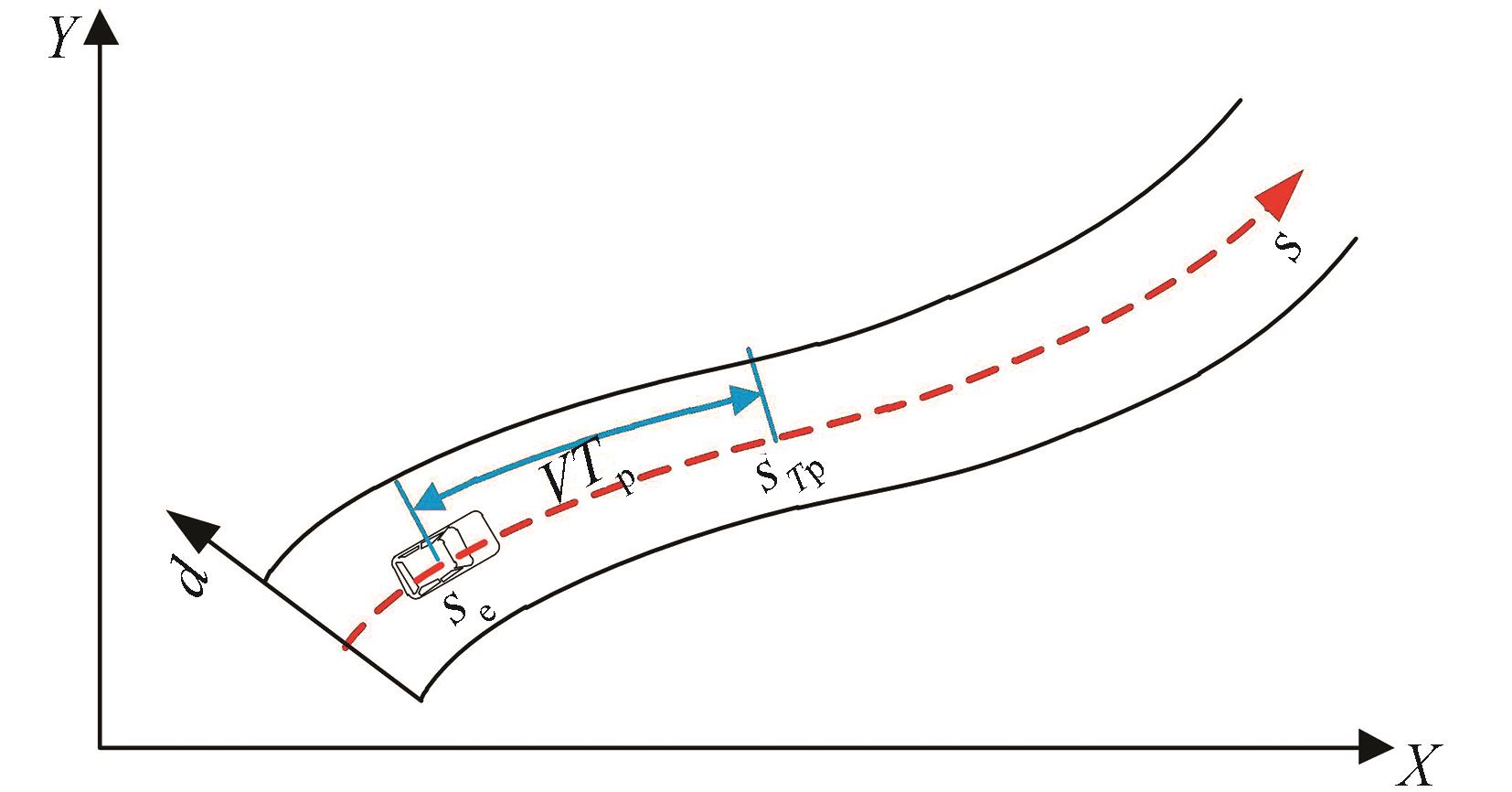
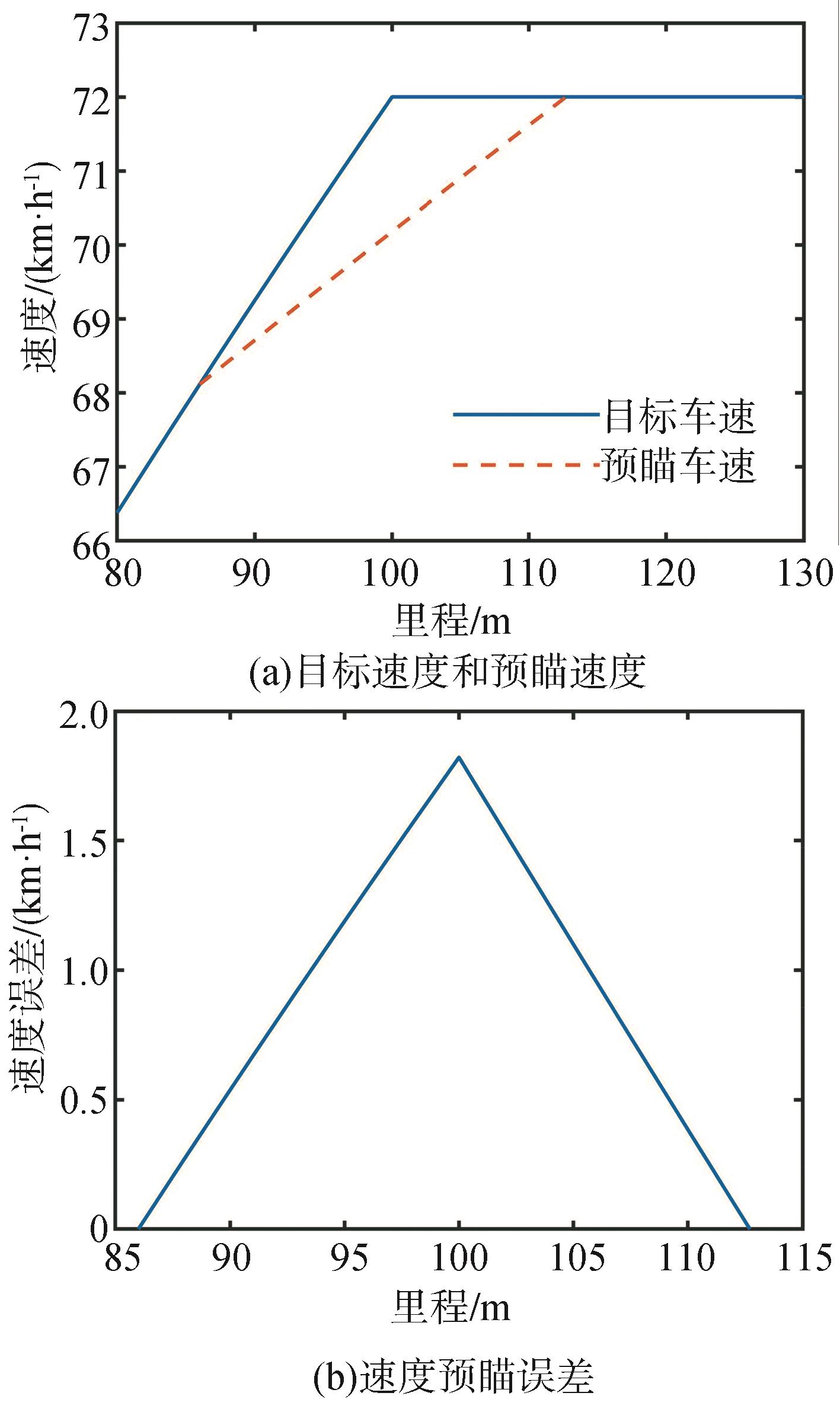
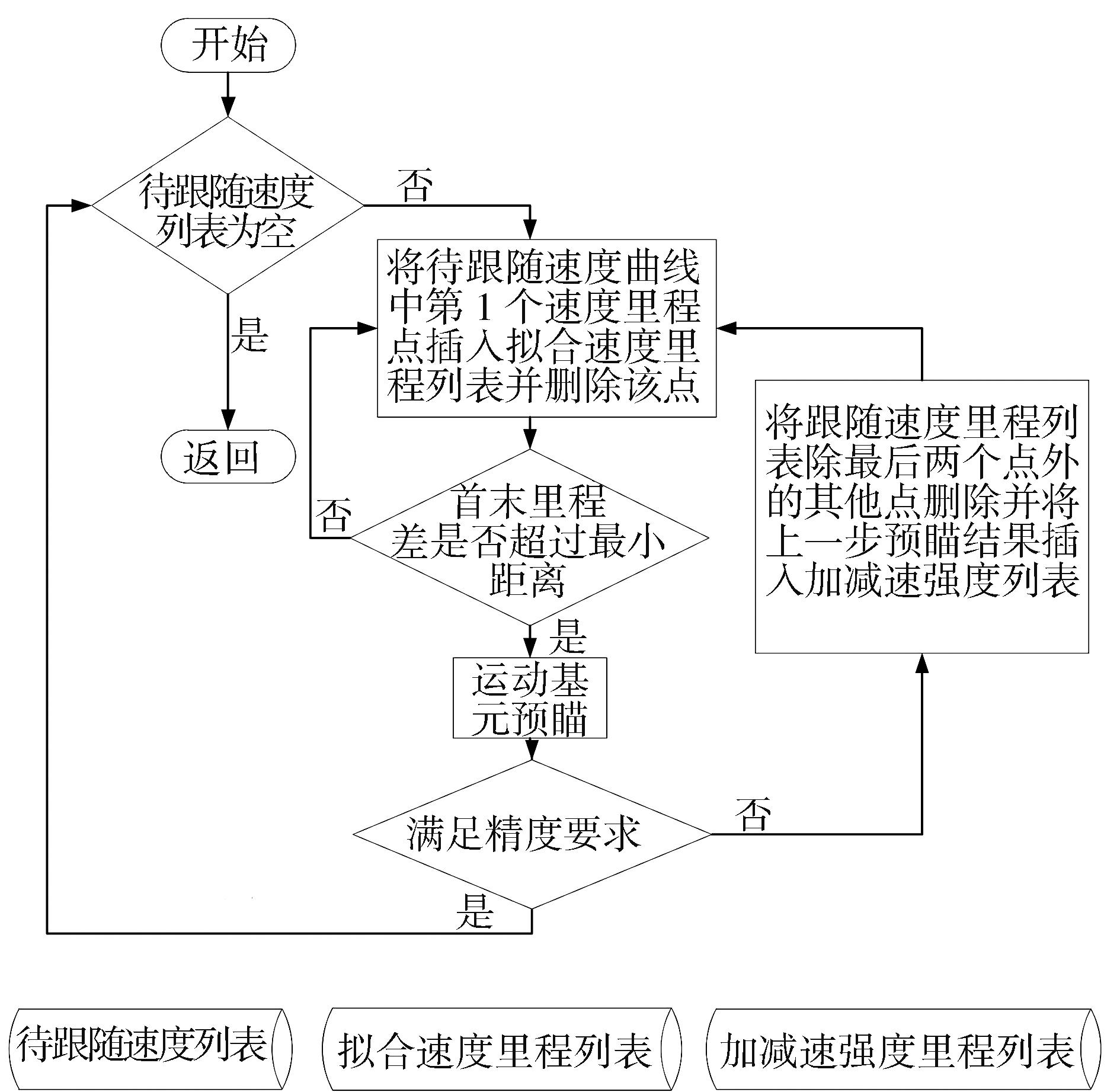
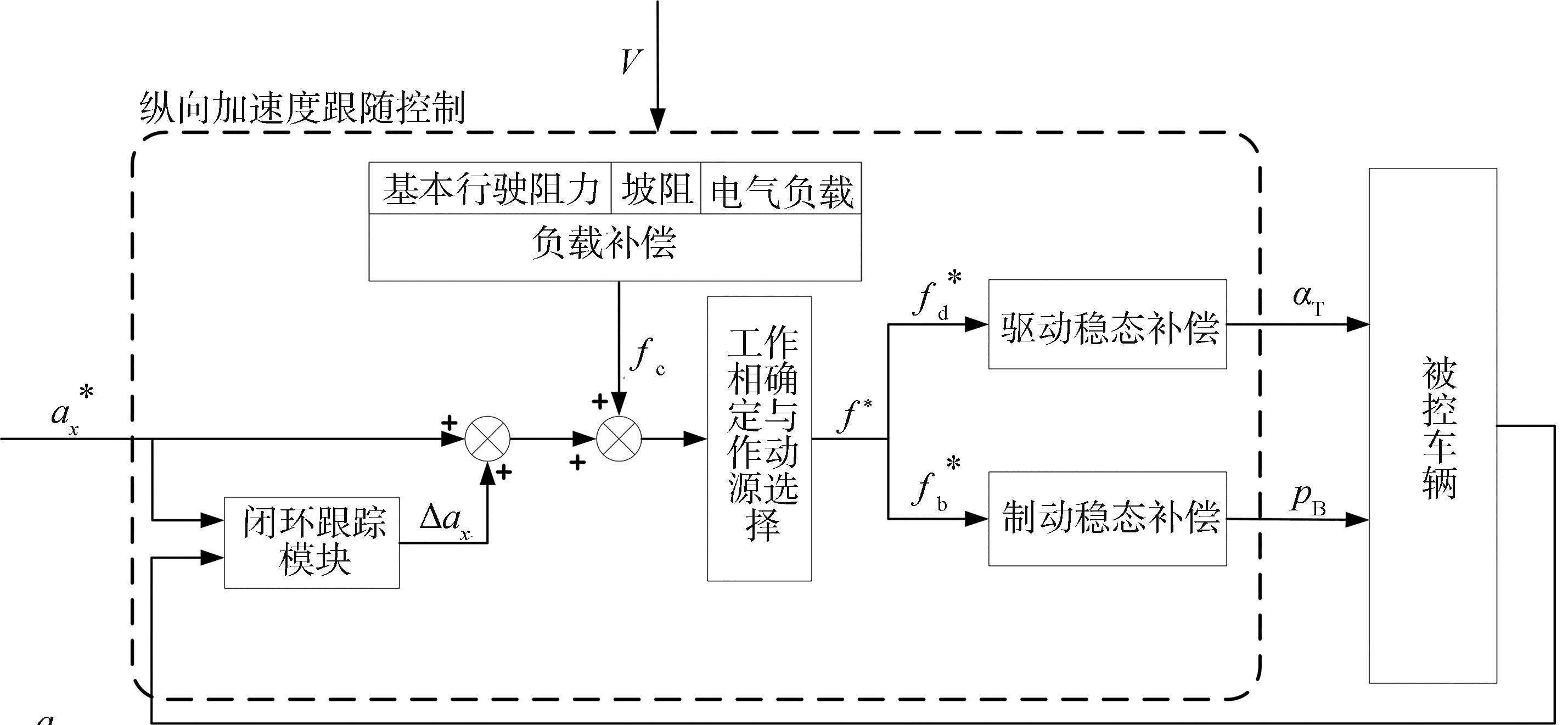
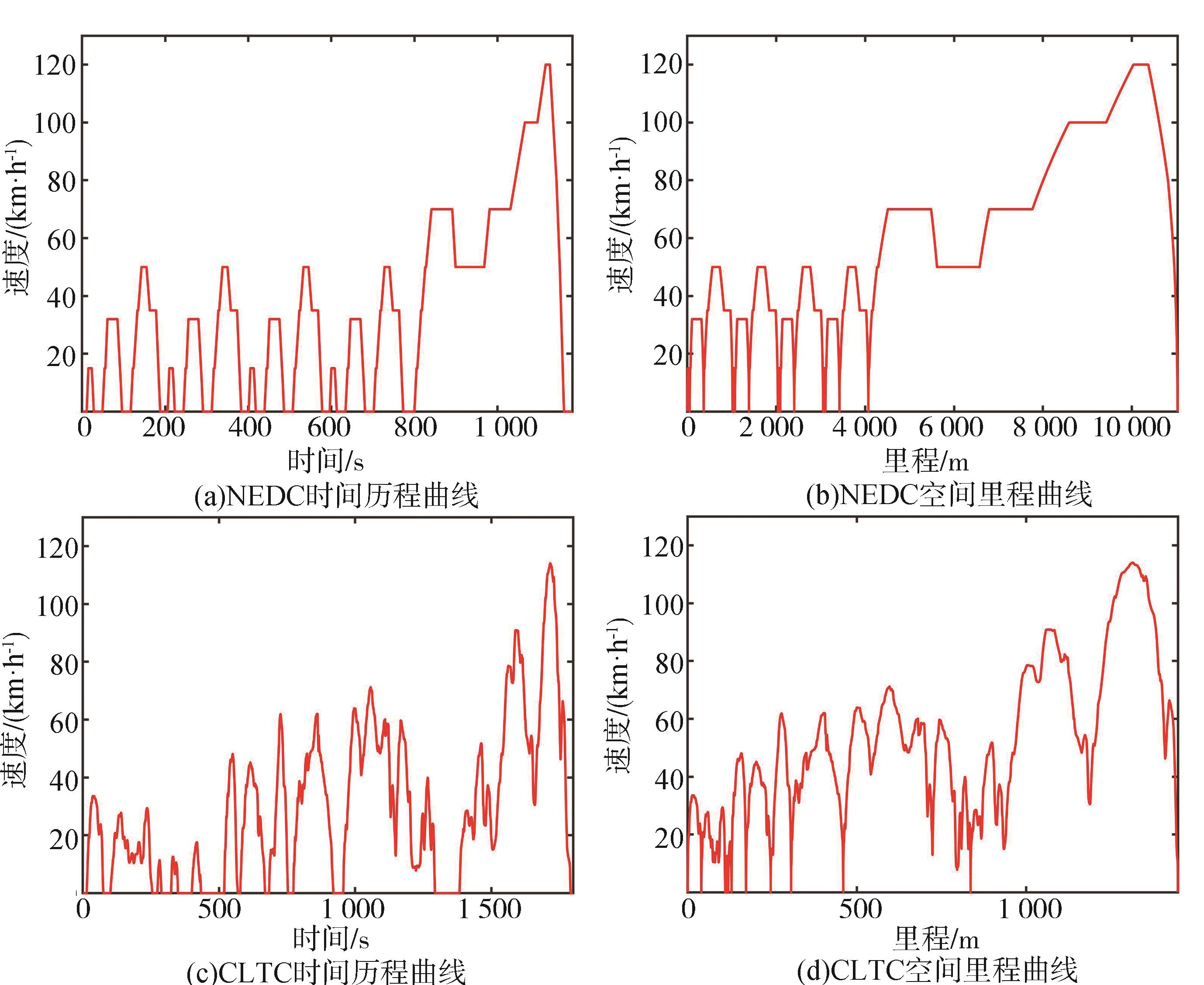
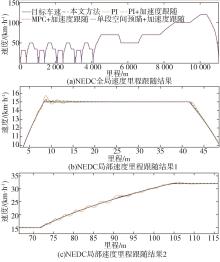
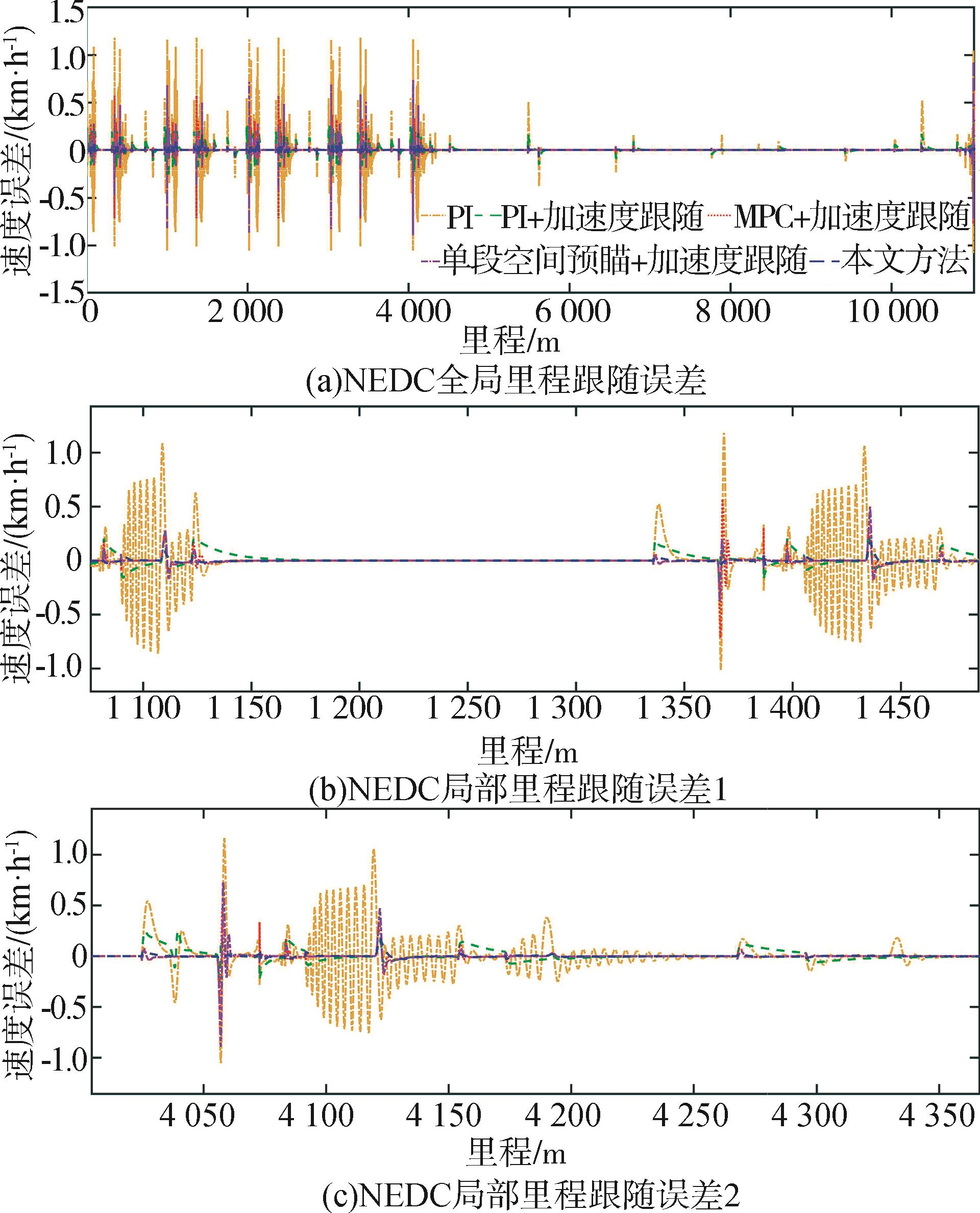
车速跟随是自动驾驶汽车的重要功能之一,为了提高自动驾驶汽车在指定空间位置处的速度跟随精度,本文提出了一种自动驾驶汽车车速跟随空间预瞄跟随方法。与其它方法相比,本文重点研究如何在空间域而非时间域进行汽车车速预瞄跟随。首先,建立基于运动基元的空间多段车速预瞄方法,本方法以运动基元对目标车速进行空间预瞄,根据误差确定分段点,动态调整每段的距离,保证预瞄误差处于容许误差范围内。根据预瞄结果确定预期纵向加速度。然后,建立纵向加速度跟随方法对预期纵向加速度进行跟随。最后,在仿真环境下,验证本文提出的方法的有效性,并与多种方法进行对比。试验结果表明,本文提出的方法与其他对比方法相比具有更高的空间跟随精度。