Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (3): 330-339.doi: 10.19562/j.chinasae.qcgc.2022.03.004
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Jie Hu( ),Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu
),Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu
Received:2021-10-21
Revised:2021-12-08
Online:2022-03-25
Published:2022-03-25
Contact:
Jie Hu
E-mail:auto_hj@163.com
Jie Hu,Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu. Parallel Parking Trajectory Planning for Autonomous Vehicles[J].Automotive Engineering, 2022, 44(3): 330-339.
"
| 方法 | 计算时间 | 平滑度 | 场景适应能力 | 路径上转 折点数量 |
|---|---|---|---|---|
| 几何法 | 非常短 | 好 | 低 | 中等 |
| 多步法 | 长 | 好 | 中等 | 大量 |
| 采样法 | 中等 | 中等 | 中等 | 少 |
| 数值优化 | 非常长 | 好 | 好 | 少 |
"
"
"
"
"
"
"
"
"
| 参数 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 车位长 | 7.5 | ||
| 车位宽 | 2.5 | ||
| 道路宽 | 6 | ||
| 车长 | 4.718 | ||
| 车宽 | 1.84 | ||
| 轴距长度 | 2.74 | ||
| 前悬长度 | 0.968 | ||
| 后悬长度 | 1.01 | ||
| 后轴中心最小转弯半径 | 6 | ||
| 最大前轮转向角 | 0.428 | ||
| 最大前轮转向角速度 | rad/s | 0.43 |

"
"
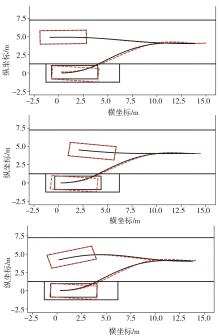
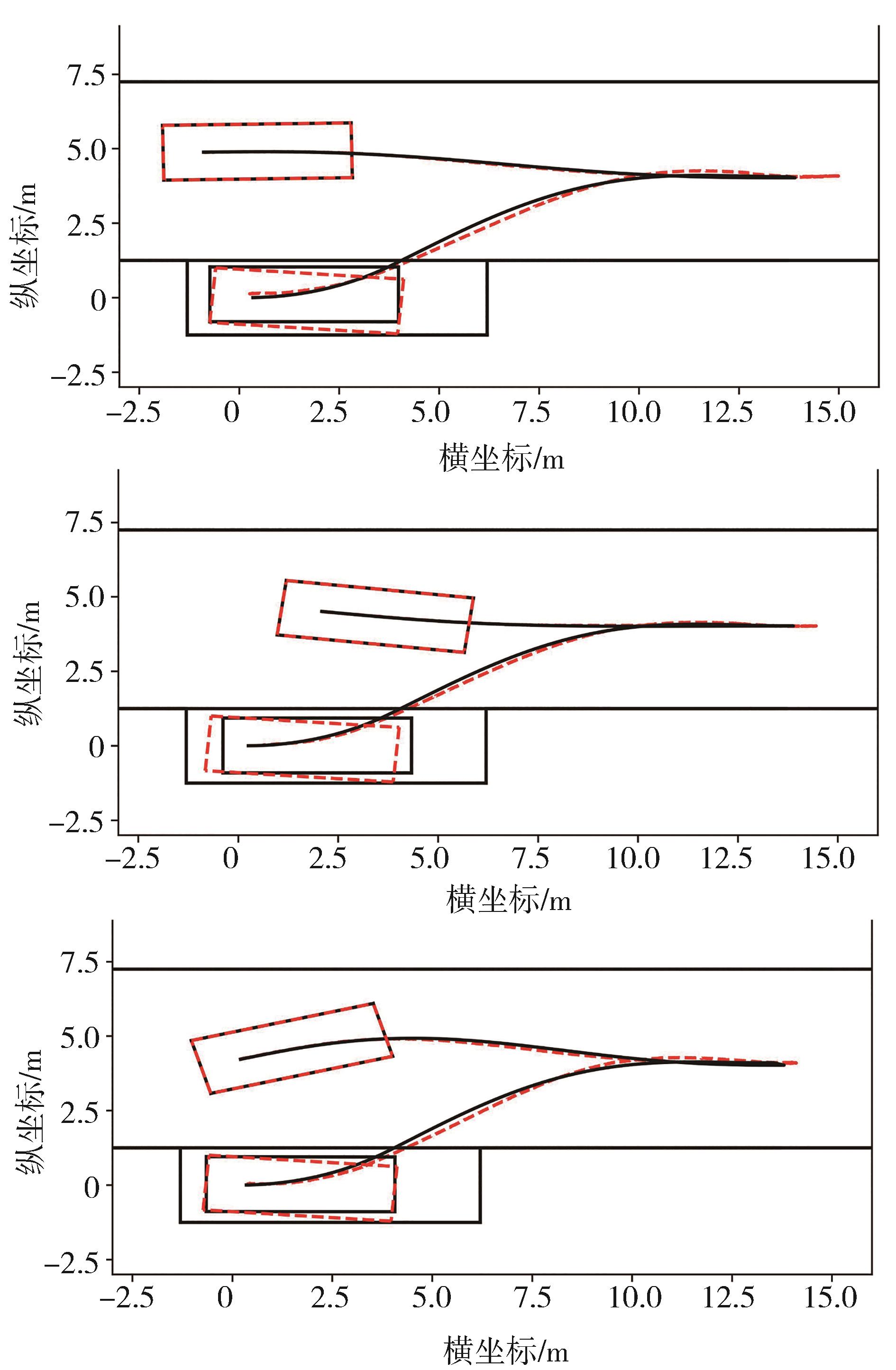
| 工况 | 后轴中心坐标/m | 航向角/rad | 转向角/rad |
|---|---|---|---|
| ① | (-2,2.75) | 0.523(30°) | 0 |
| ② | (-2,2.75) | 0 | -0.174(10°) |
| ③ | (-1,4.25) | 0 | 0.174(-10°) |

"
"
"
"

"

"
| 1 | REEDS J A,SHEPP L A. Optimal paths for a car that goes both forwards and backwards[J]. Pacific Journal of Mathematics,1990,145(2):367-393. |
| 2 | PAROMTCHIK I E,LAUGIER C. Autonomous parallel parking of nonholomic vehicles[C].Proceedings of the IEEE Intelligent Vehicles Symposium,MN:[s.n.],1996:3117-3122. |
| 3 | CHOI S, BOUSSARD C,d’ANDRÉA-Novel B.Easy path planning and robust control for automatic parallel parking[C].World Congress,2011:656-661. |
| 4 | 江浩斌,沈峥楠,马世典.基于信息融合的自动泊车系统车位智能识别[J].机械工程学报,2017,53(22):125-133. |
| JIANG H B, SHEN Z N, MA S D. Intelligent identification of automatic parking system based on information fusion[J]. Journal of Mechanical Engineering, 2017,53(22):125-133. | |
| 5 | 姜武华,辛鑫,陈无畏,等.基于信息融合的自动泊车系统多工况车位识别和决策规划[J].机械工程学报,2021,57(6):131-141. |
| JIANG W H, XIN X, CHEN W W, et al. Multi-condition parking space recognition based on information fusion and decision planning of automatic parking system[J]. Journal of Mechanical Engineering, 2021,57(6):131-141. | |
| 6 | VOROBIEVA H, MINOIU-ENACHE N GLASER S,et al. Geometric continuous curvature path planning for automatic parallel parking[C]. IEEE International Conference on Networking, Sensing and Control. IEEE,2013:418-423. |
| 7 | ZHANG Dezhao,LI Shengbo, YANG Qiang, et al. Optimization based trajectory planning of parallel parking with multiple constraints[J].SAE Int. J. Passeng. Cars-Electron. Electr. Syst. ,2015,8(2):413-418. |
| 8 | 张持,张永林.基于两段圆弧的倒推式平行泊车路径规划方法[J].计算机与数学工程,2019,47(12):3035-3040. |
| ZHANG C, ZHANG Y L. Inverted parallel parking path planning method based on the two-arc[J]. Computer & Digital Engineering,2019,47(12):3035-3040. | |
| 9 | 王启明,宗高强,胥津铭.多段式自动泊车最优路径规划与仿真分析[J].系统仿真学报. https://kns.cnki.net/kcms/detail/11.3092.V.20210204.1632.012.html. |
| WANG Q M, ZONG G Q, XU J M. Optimal path planning and simulation analysis of multi-stage automatic parking[J]. Journal of System Simulation.https://kns.cnki.net/kcms/detail/ 11.3092.V.20210204.1632.012.html. | |
| 10 | 张家旭,赵健,施正堂,等.基于回旋曲线的平行泊车路径规划和跟踪控制[J]. 吉林大学学报(工学版),2020,50(6):2247-2257. |
| ZHANG J X, ZHAO J, SHI Z T, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University (Engineering and Technology Edition),2020,50(6):2247-2257. | |
| 11 | 魏翠芳.基于超声波传感器的平行车位自动泊车轨迹规划[J].农业装备与车辆工程,2020,58(7):106-109. |
| WEI C F. Automatic parking trajectory planning for parallel parking spaces based on ultrasonic sensors[J]. Agricultural Equipment & Vehicle Engineering, 2020,58(7):106-109. | |
| 12 | 吴玲玉,白国振,管登诗.自动泊车的运动轨迹规划[J].农业装备与车辆工程,2017,55(9):85-89. |
| WU Y L, BAI G Z, GUAN D S. Trajectory planning of automatic parking[J]. Agricultural Equipment & Vehicle Engineering, 2017,55(9):85-89. | |
| 13 | 胡勤明,王金刚,张小俊.五次多项式优化的平行泊车路径规划[J].计算机工程与应用. https://kns.cnki.net/kcms/detail/11.2127.TP.20210325.1007.008.html. |
| HU Q M,WANG J G, ZHANG X J. Optimized parallel parking path planning based on quintic polynomial[J]. Computer Engineering and Applications.https://kns.cnki.net/kcms/ detail/11.2127.TP.20210325.1007.008.html. | |
| 14 | 张家旭,王晨,赵健,等.面向狭小平行泊车位的路径规划与跟踪控制[J].吉林大学学报(工学版). https://doi.org/10.13229/j.cnki.Jdxbgxb20200417. |
| ZHANG J X, WANG C, ZAHO J, et al. Path planning and tracking control for narrow parallel parking space[J].Journal of Jilin University (Engineering and Technology Edition). https://doi.org/10.13229/j. cnki.Jdxbgxb20200417. | |
| 15 | 熊莹,毛雪松.基于二段多项式的窄空间平行泊车路径规划方法[J].计算机系统应用,2020,29(8):211–216. |
| XIONG Y, MAO X S. Path planning by two-piece polynomial equation in narrow space for parallel parking[J]. Computer Systems & Applications,2020,29(8):211–216. | |
| 16 | LAUMOND J P, JACOBS P E, TAIX M, et al. A motion planner for nonholonomic mobile robots[J]. IEEE Transactions on Robotics and Automation, 1994.10(5):577–593. |
| 17 | LAUMOND J P, SEKHAVAT S, VAISSET M.Collision-free motion planning for a nonholonomic mobile robot with trailers[J]. IFAC Proceedings Volumes,1994,27(14): 171–177. |
| 18 | KIM D, CHUNG W. Motion planning for car parking using the slice projection technique[C]. 2008 IEEE/RSJ International Conference on Intelligent Robots and System, 2008:1050–1055. |
| 19 | KONDAK K, HOMMEL G. Computation of time optimal movements for autonomous parking of nonholonomic mobile platforms[C]. Proceedings of the 2001 IEEE International Conference on Robotics & Automation, 2001: 2698–2703. |
| 20 | LI B, WANG K, SHAO Z.Time-optimal maneuver planning in automatic parallel parking using a simultaneous dynamic optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016,17(11): 3263–3274. |
| 21 | 郭孔辉. 预瞄跟随理论与人一车闭环系统大角度操纵运动仿真[J].汽车工程,1992,14(1):1-11. |
| GUO K H. Preview follower theory and simulations of large angle cornering motion of a man-vehicle system[J]. Automotive Engineering,1992,14(1):1-11. |
| [1] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [2] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [3] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [4] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [5] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [6] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [7] | Ping Liu, Zhuo Chen, Mingjie Liu, Changhao Piao, Soohyun Jang, Kailin Wan. Gauss Allocation Points Parameterization Parallel Automatic Parking Trajectory Planning for Vehicle Under Multi-Stage Constraints [J]. Automotive Engineering, 2023, 45(7): 1163-1173. |
| [8] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [9] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [10] | Lijun Qian,Chen Chen,Jian Chen. Centralized Trajectory Planning in an Unsignalized Intersection Environment Considering Driver Error [J]. Automotive Engineering, 2023, 45(5): 768-776. |
| [11] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [12] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [13] | Hongchang Zhang,Peng Ning,Jie Yang,Jianwei Song,Lin Hao,Juan Zeng. Parallel Parking Trajectory Planning Based on Double-Layer Solution Strategy [J]. Automotive Engineering, 2023, 45(12): 2299-2309. |
| [14] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [15] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |