汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 971-977.doi: 10.19562/j.chinasae.qcgc.2021.07.003
郭景华1,2( ),肖宝平1,王靖瑶1,罗禹贡2,陈涛3,李克强2
),肖宝平1,王靖瑶1,罗禹贡2,陈涛3,李克强2
Jinghua Guo1,2(),Baoping Xiao1,Jingyao Wang1,Yugong Luo2,Tao Chen3,Keqiang Li2
摘要:
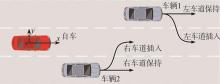
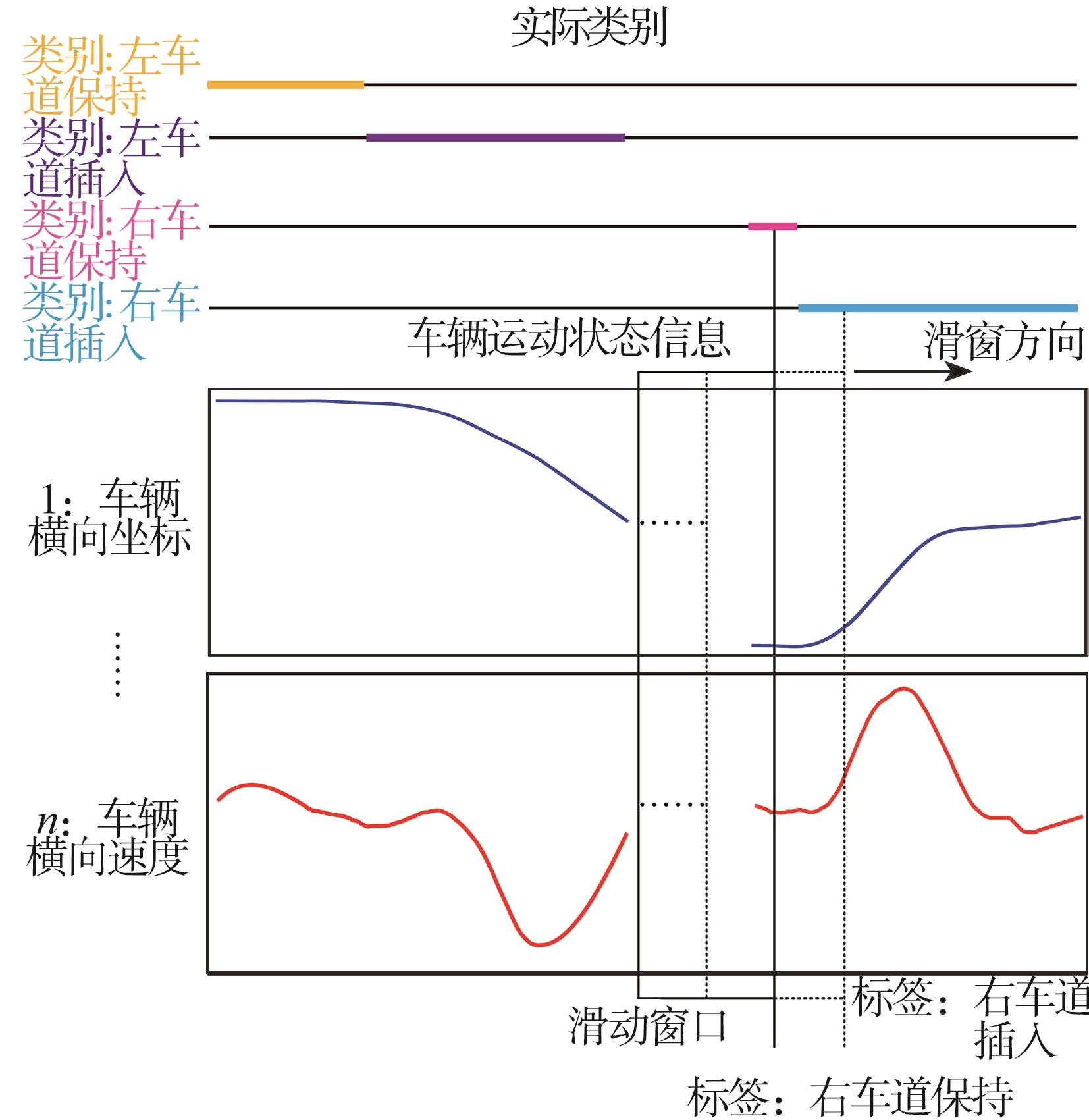
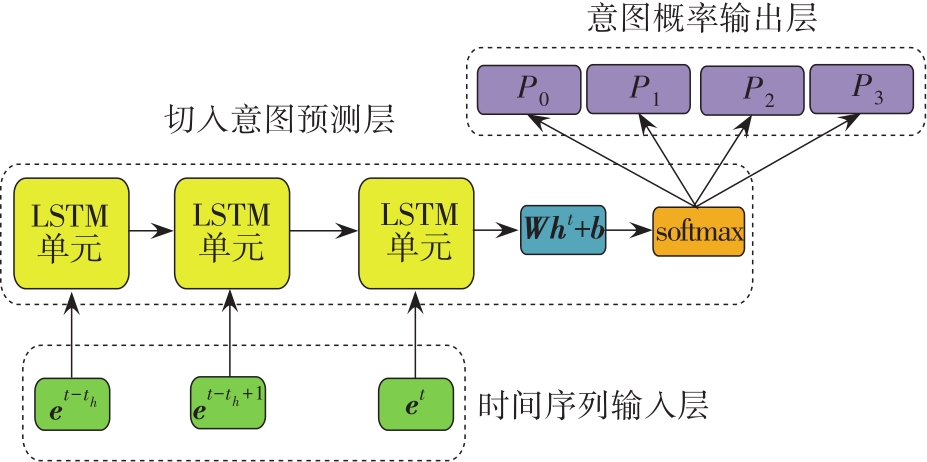
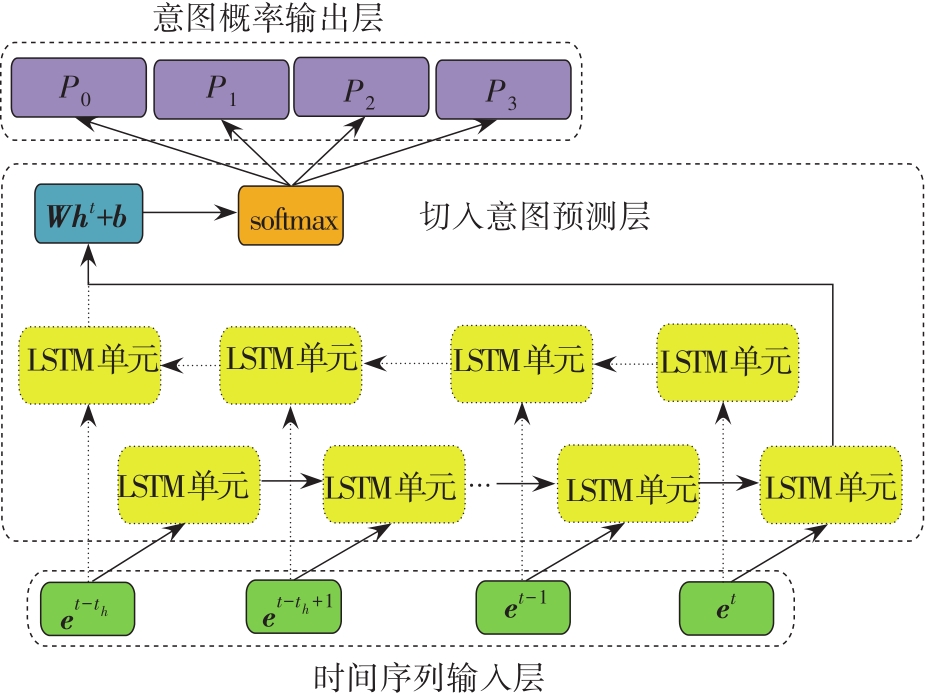
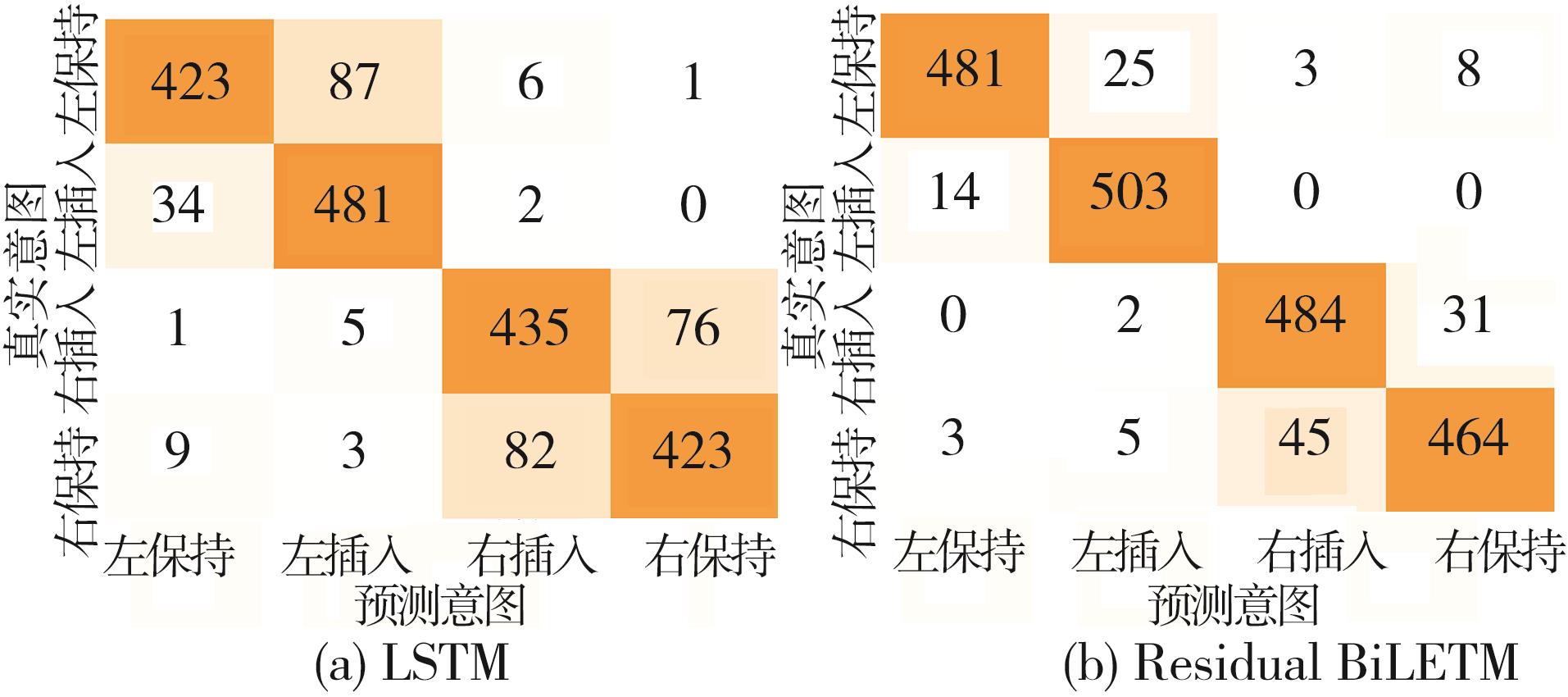
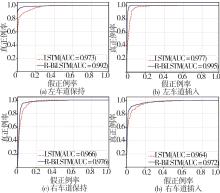
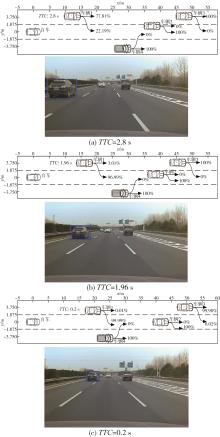
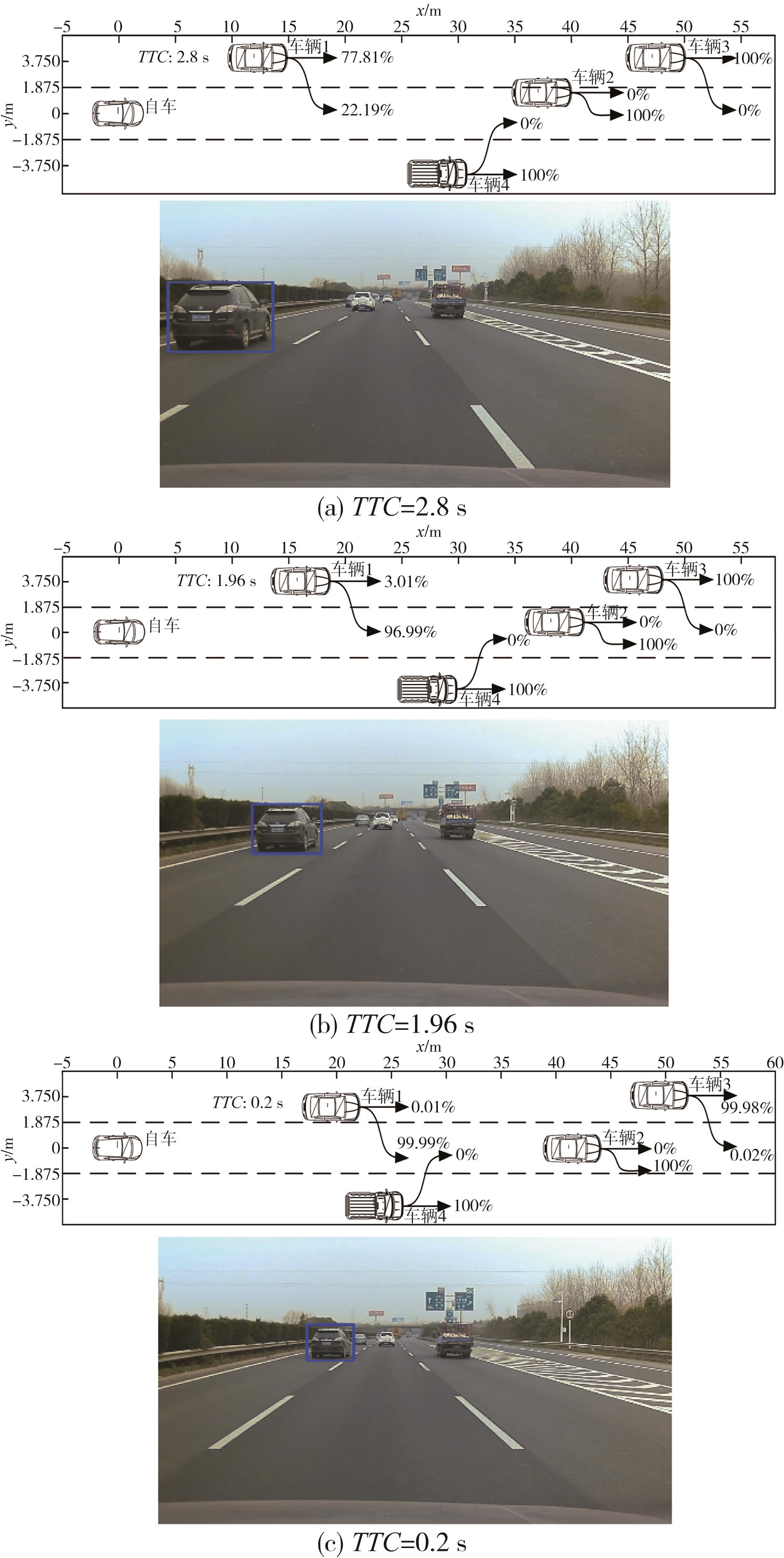
本文中根据中国实际道路特征,提出一种基于Residual BiLSTM网络的车辆切入意图预测模型,从切入车辆的轨迹信息和与自车的交互信息中提取切入特征,并采用softmax函数计算切入意图,分别为左车道保持、左车道插入、右车道插入和右车道保持的概率,最后利用中国复杂路况的自然驾驶数据集对预测模型进行训练和测试。结果表明,所提出的Residual BiLSTM车辆切入意图预测模型有明显优势,其准确率比LSTM提升8.2个百分点,且能较早地预测出车辆的切入意图,对提高自动驾驶车辆的决策规划能力和安全性具有重要的意义。