汽车工程 ›› 2021, Vol. 43 ›› Issue (8): 1177-1186.doi: 10.19562/j.chinasae.qcgc.2021.08.008
鲁若宇1,2,3,胡杰1,2,3( ),陈瑞楠1,2,3,徐文才1,2,3,曹恺4
),陈瑞楠1,2,3,徐文才1,2,3,曹恺4
Ruoyu Lu1,2,3,Jie Hu1,2,3(),Ruinan Chen1,2,3,Wencai Xu1,2,3,Kai Cao4
摘要:
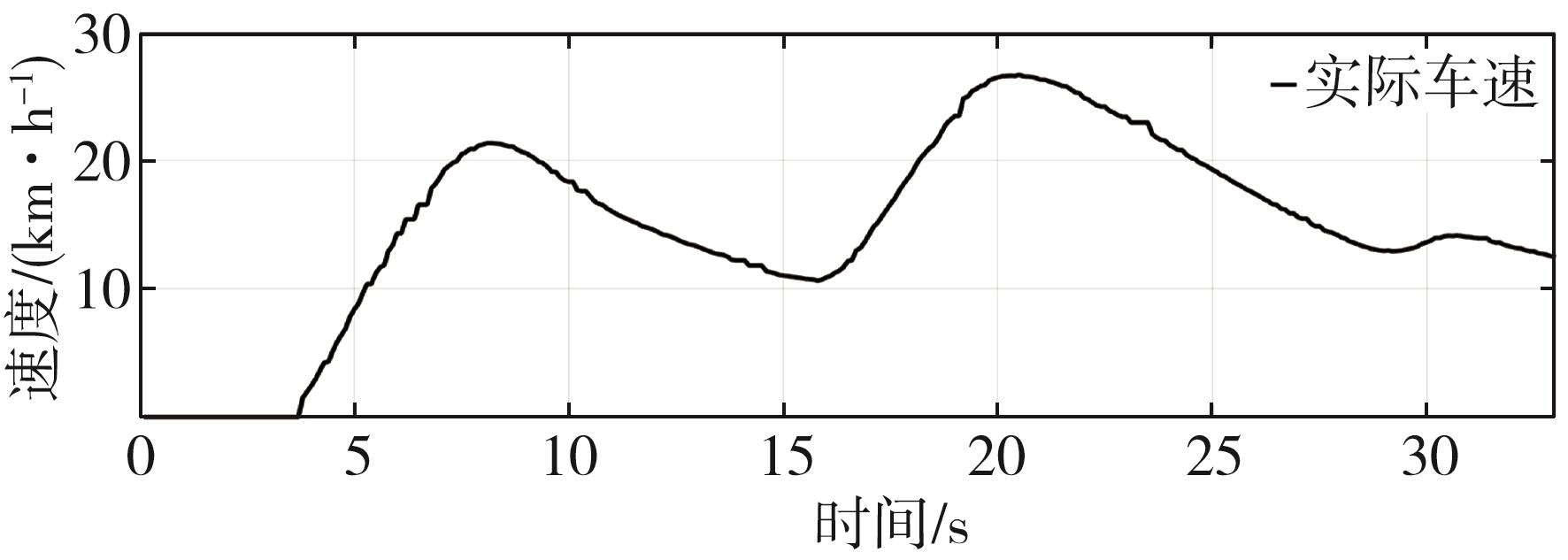
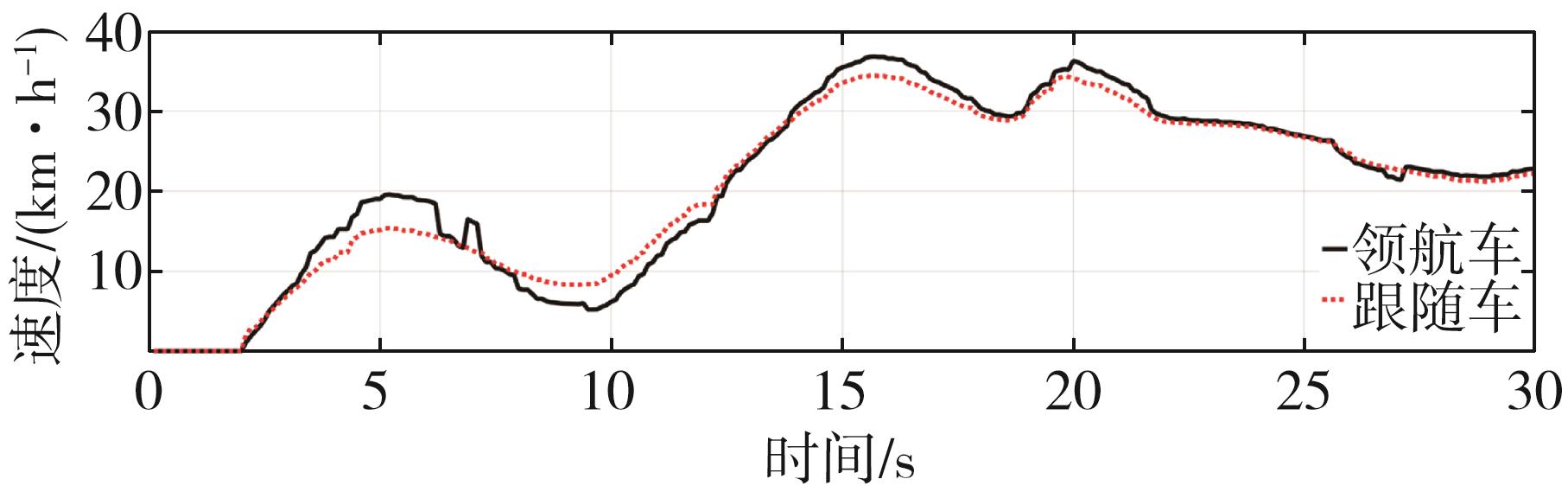
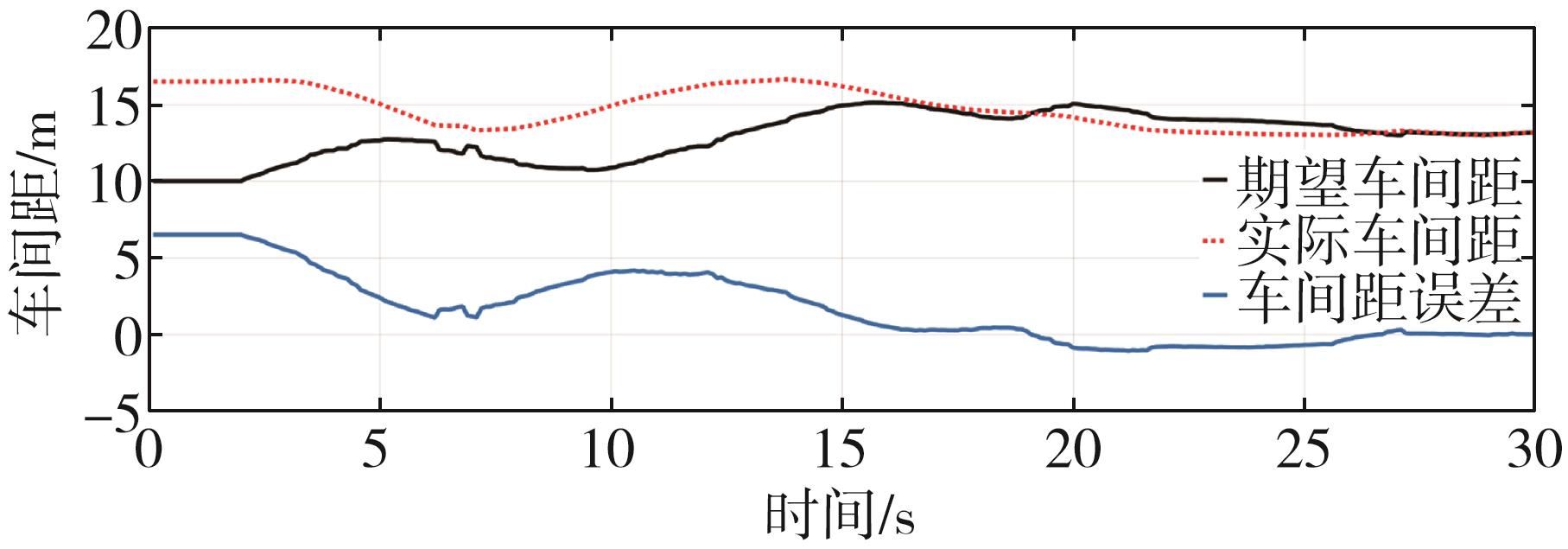
本文中针对单向通信拓扑的非线性车辆队列协同式自适应巡航(CACC)控制问题,提出一种保证队列稳定且满足队列各车跟随性、安全性和乘员舒适性的分布式模型预测控制(DMPC)策略。首先建立了车辆队列的动力学模型和通信拓扑结构模型,并基于队列系统的多项优化性能设计代价函数和系统约束,使队列中每一辆跟随车基于其接收到的有限信息求解一个开环局部最优问题,计算出当前时刻的最优控制量作为输入并不断重复这个过程,达到滚动优化的目的,实现车辆队列的协同式自适应巡航控制。其次通过CACC系统局部代价函数之和构建Lyapunov候选函数,证明了车辆队列系统渐进稳定性的充分条件。最后通过CarSim和Simulink联合仿真,分析了算法在理想状态下对不同形式单向通信拓扑车辆队列的控制性能;通过实车试验,验证了算法在实车条件下感知层存在抖动、底层控制存在延迟和误差时的控制性能。仿真和实车试验的结果表明,本文提出的控制策略能使队列车辆实现各项优化性能,同时对外部干扰有较好的鲁棒性。