汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1212-1221.doi: 10.19562/j.chinasae.qcgc.2023.07.012
所属专题: 底盘&动力学&整车性能专题2023年
孙晓强1( ),王玉麟1,胡伟伟1,蔡英凤1,陈龙1,Wong Pak Kin2
),王玉麟1,胡伟伟1,蔡英凤1,陈龙1,Wong Pak Kin2
收稿日期:2022-04-25
修回日期:2022-05-29
出版日期:2023-07-25
发布日期:2023-07-25
通讯作者:
孙晓强
E-mail:sxq@ujs.edu.cn
基金资助:
Xiaoqiang Sun1(),Yulin Wang1,Weiwei Hu1,Yingfeng Cai1,Long Chen1,Wong Pak Kin2
Received:2022-04-25
Revised:2022-05-29
Online:2023-07-25
Published:2023-07-25
Contact:
Xiaoqiang Sun
E-mail:sxq@ujs.edu.cn
摘要:
以车辆横向运动过程中的行驶状态精确估计为目标,提出了一种考虑轮胎非线性侧偏力学特性的行驶状态估计算法。为准确反映特殊行驶工况下车辆横向动力学行为演化规律,采用分段仿射辨识方法建立了轮胎非线性侧偏力学特性模型,进而实现整车横向动力学分段仿射模型的构建。在此基础上,基于强跟踪平方根容积卡尔曼滤波算法设计了针对系统分段仿射模型的“多模切换”行驶状态估计策略,以期当系统状态发生突变时依然能够保持良好的状态估计精度。基于CarSim和Matlab/Simulink建立了车辆行驶状态估计性能联合仿真验证平台,通过设置两种典型工况,对车辆横摆角速度和质心侧偏角的状态估计效果进行了验证。结果表明,所提出的估计算法能够实现特殊行驶工况下车辆行驶状态的高精度估计。
孙晓强, 王玉麟, 胡伟伟, 蔡英凤, 陈龙, Wong Pak Kin. 基于轮胎分段仿射辨识模型的车辆行驶状态估计策略研究[J]. 汽车工程, 2023, 45(7): 1212-1221.
Xiaoqiang Sun, Yulin Wang, Weiwei Hu, Yingfeng Cai, Long Chen, Wong Pak Kin. Research on Estimation Strategy of Vehicle Driving State Based on Tire Piecewise Affine Identification Model[J]. Automotive Engineering, 2023, 45(7): 1212-1221.
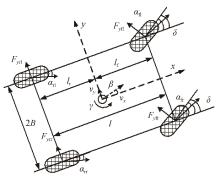
图1
车辆2自由度横向动力学模型"
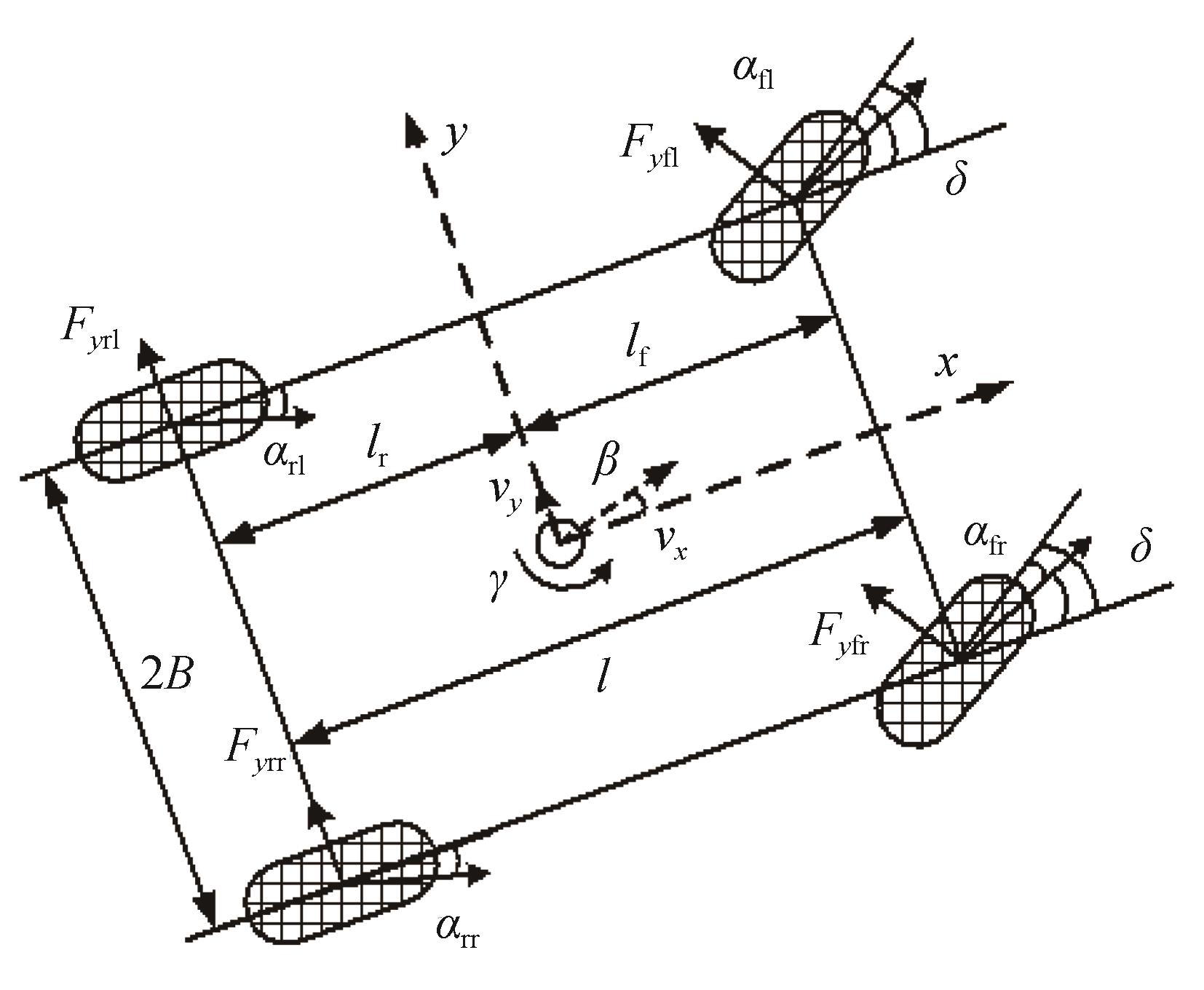
图2
低附路面轮胎侧偏特性试验结果(μ=0.34)"
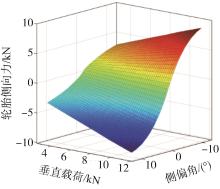
图3
高附路面轮胎侧偏特性试验结果(μ=0.77)"
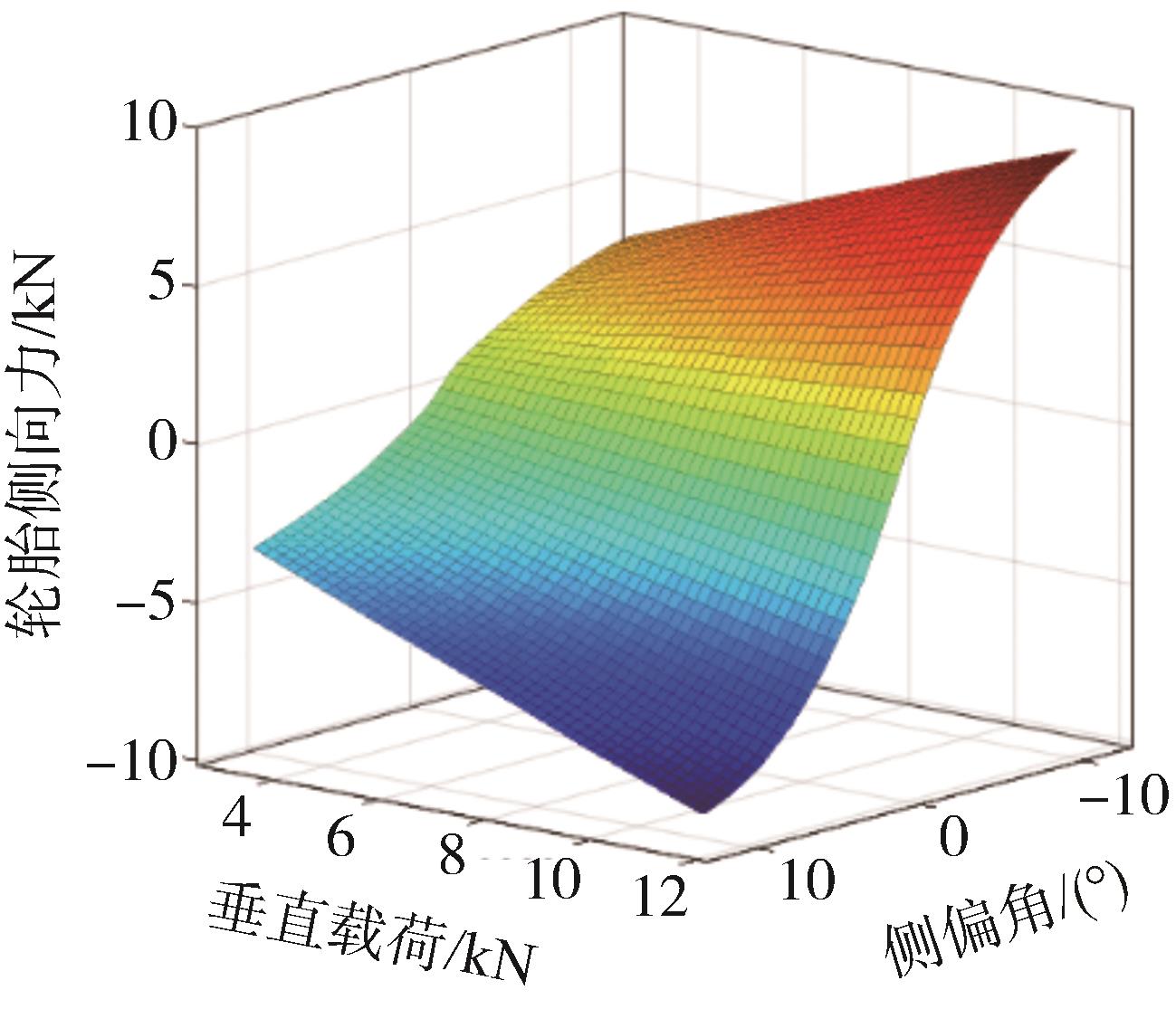
表1
仿射子模型参数"
| PWA模型 | 仿射子模型参数 | PWA模型 | 仿射子模型参数 | ||||
|---|---|---|---|---|---|---|---|
| 低附路面 | -1 509.0 | 0.011 | -979.4 | 高附路面 | -0.115 | 779.5 | -460.0 |
| -949.7 | -0.312 | 2 091.0 | 0.124 | -1 233.0 | -441.7 | ||
| -907.3 | 0.197 | -1 835.0 | -0.263 | 1 504.0 | -258.3 | ||
| -589.1 | 0.490 | -3 005.0 | 0.256 | -968.2 | -172.2 | ||
| -262.3 | -0.654 | 1 559.0 | -0.216 | 1 428.2 | -338.0 | ||
| -512.6 | -0.572 | 2 783.3 | -0.010 | -232.2 | -685.7 | ||
| -960.9 | 0.367 | -3 754.0 | -0.302 | 752.2 | -120.0 | ||
| -293.8 | 0.620 | -1 873.0 | 0.264 | -538.1 | -120.2 | ||
| -1 276.0 | -0.184 | 1 226.2 | 0.223 | -1 377.0 | -266.4 | ||
| -763.1 | -0.458 | 2 948.0 | -0.289 | 1 107.4 | -170.5 | ||

图5
PWA轮胎模型与试验数据的误差"
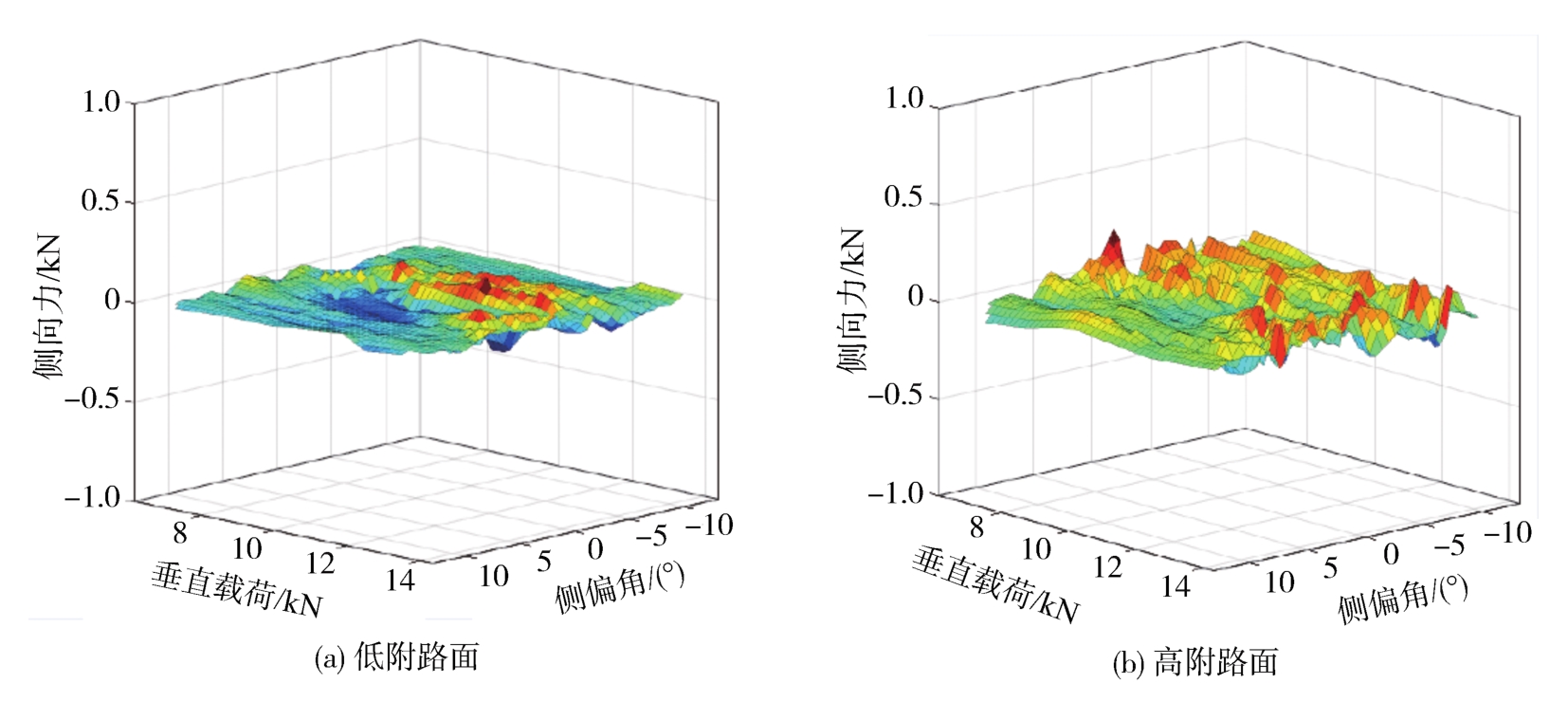

图6
车辆行驶状态估计算法框架"

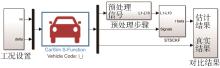
图7
CarSim-Simulink联合仿真模型"
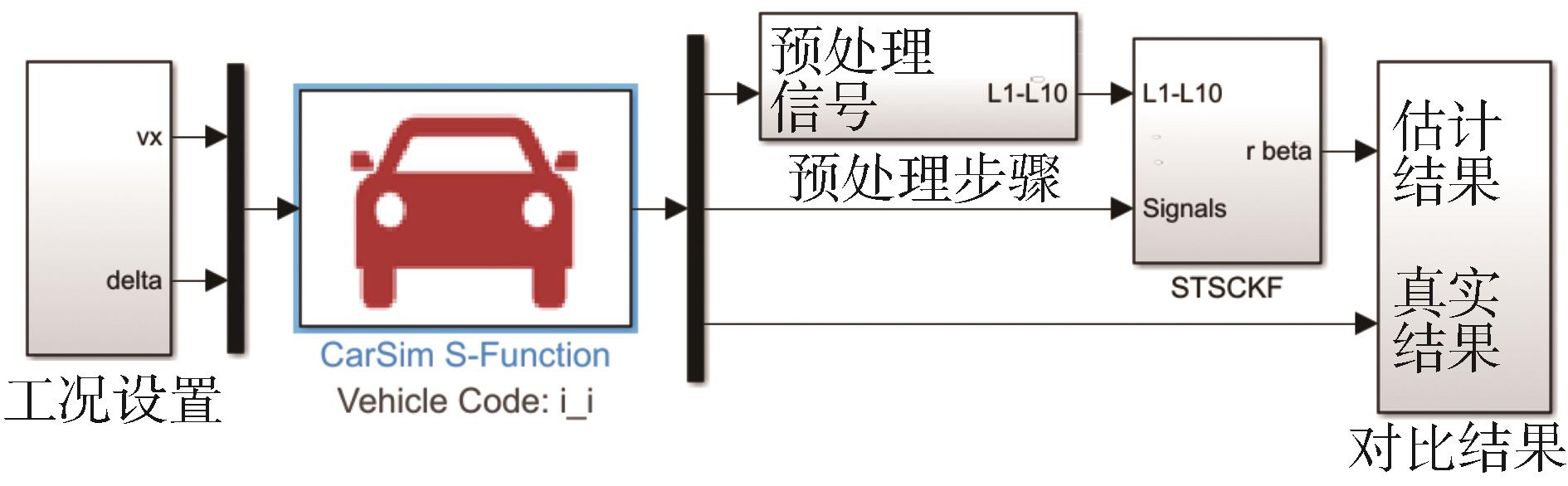
表2
整车主要参数"
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 2 350 |
| 前轮到质心距离lf /m | 1.337 |
| 后轮到质心距离lr/m | 1.587 |
| 轮距B/m | 1.53 |
| 质心到地面高度hg/m | 0.652 |
| 横摆转动惯量Iz /(kg·m2) | 4 386 |
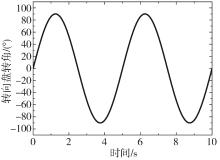
图8
转向盘转角"
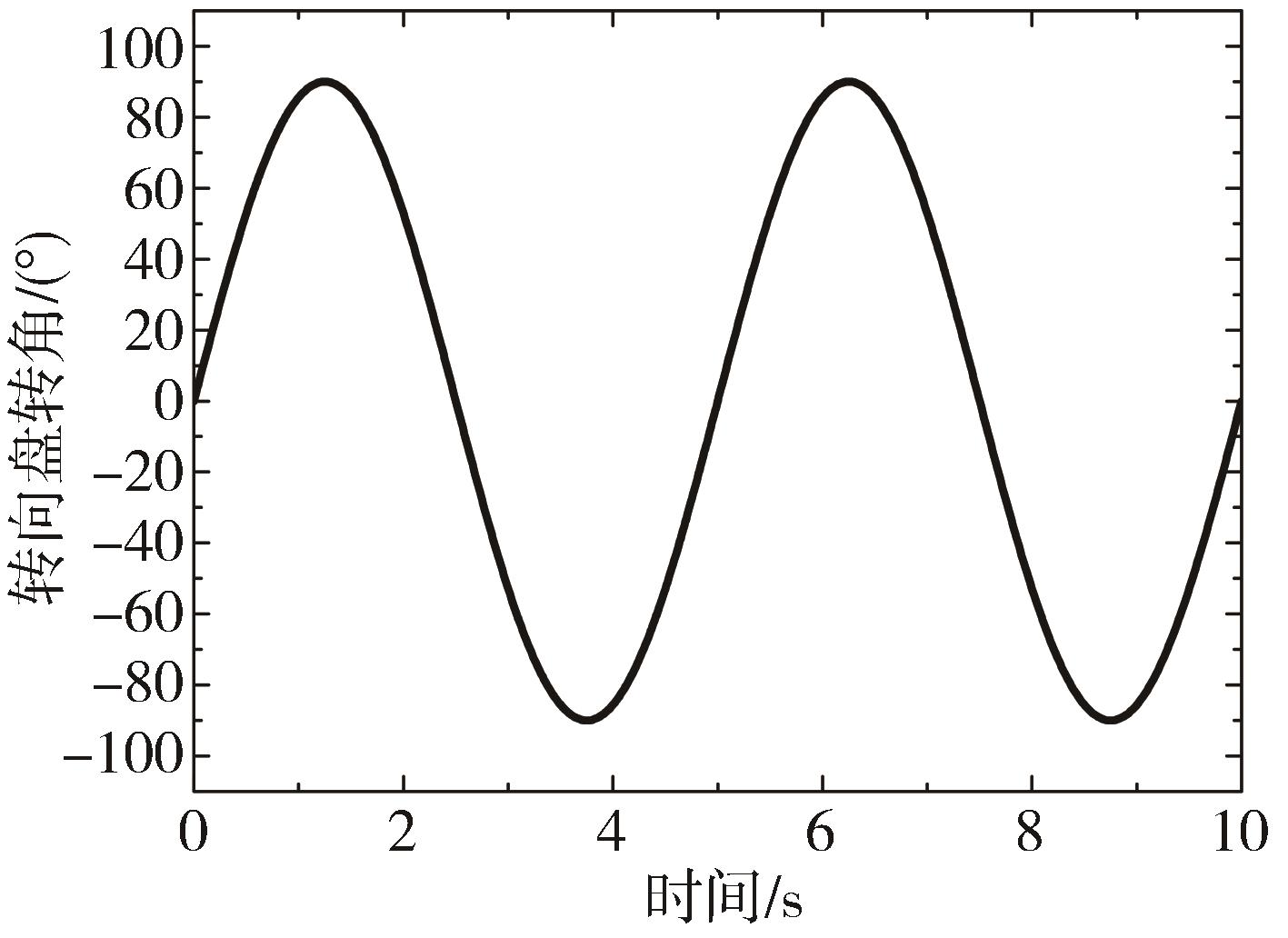
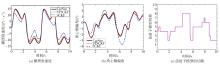
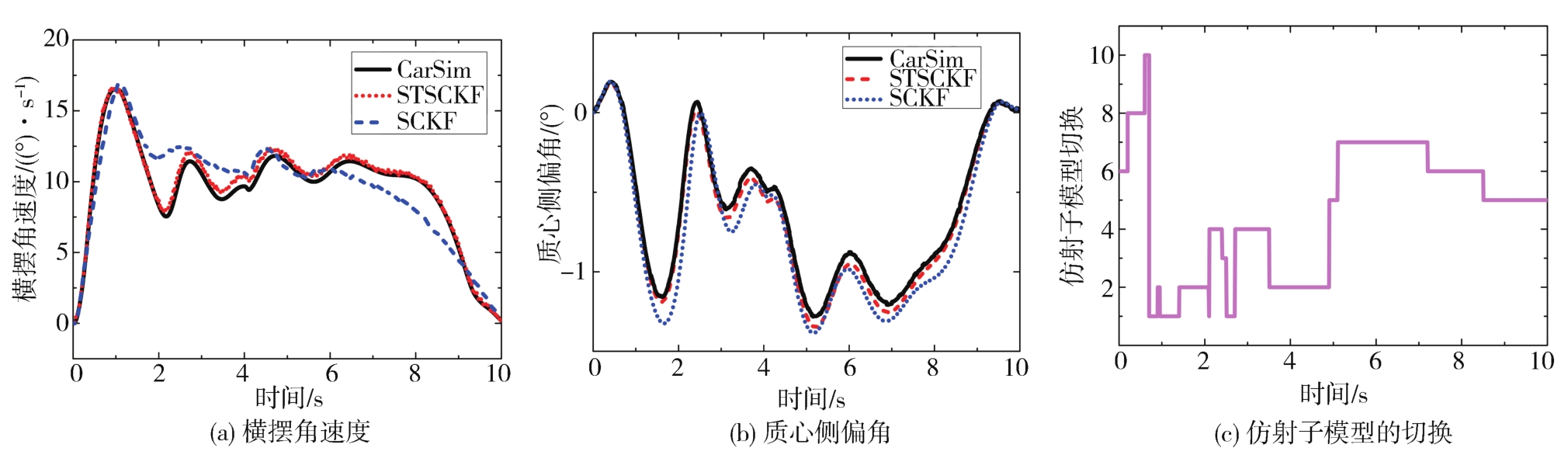
图9
正弦工况下的估计结果对比"
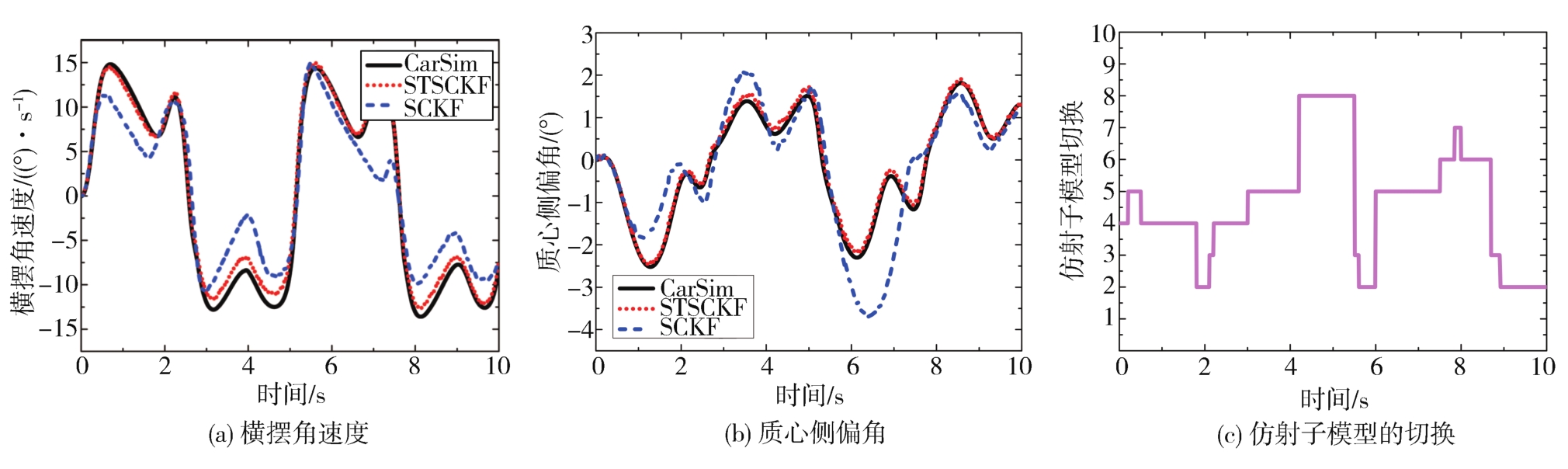
表3
两种工况下两种策略的估计误差"
| 估计策略 | ? | ?βMAX | ? | ?βRMS |
|---|---|---|---|---|
| STSCKF(工况1) | 1.76 | 0.24 | 0.69 | 0.06 |
| SCKF(工况1) | 10.98 | 2.62 | 3.81 | 0.78 |
| STSCKF(工况2) | 0.94 | 0.08 | 0.25 | 0.02 |
| SCKF(工况2) | 5.24 | 0.14 | 1.02 | 0.14 |
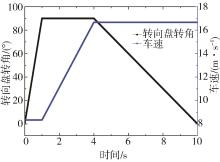
图10
J turn工况"
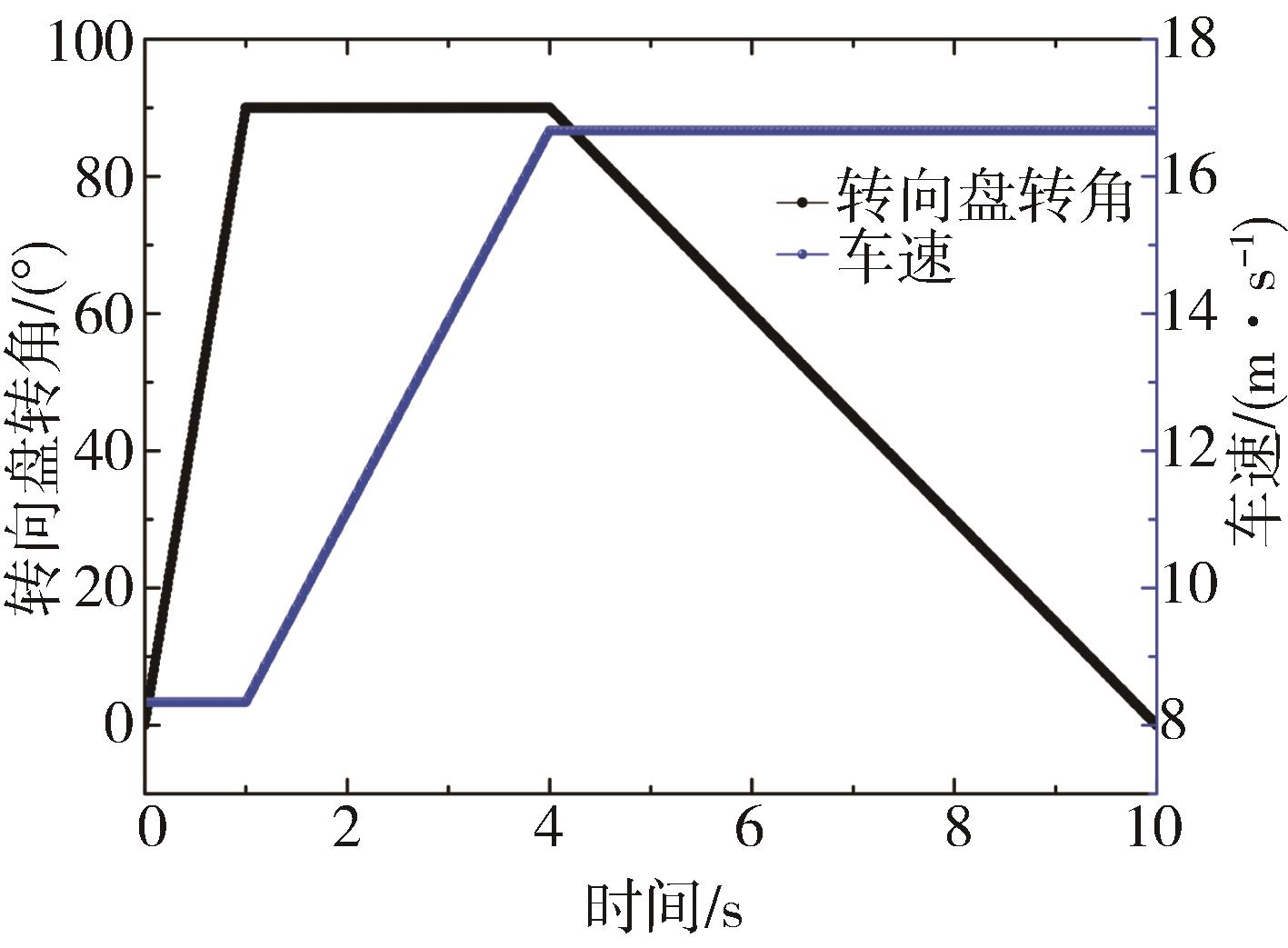
图11
J turn工况下的估计结果对比"
| 1 | 王宪彬, 韩红, 施树明. 驾驶员预瞄时间与公路弯道半径的耦合特征[J]. 江苏大学学报(自然科学版), 2022, 43(3): 249-255. |
| WANG X, HAN H, SHI S. Coupling characteristics of driver preview time and road bend radius[J]. Journal of Jiangsu University (Natural Science Edit), 2022, 43(3): 249-255. | |
| 2 | 梁宝钰,汪怡平,刘珣,等.基于滑模理论的高速车辆侧风稳定性控制研究[J].汽车工程,2022,44(1):123-130. |
| LIANG B, WANG Y, LIU X, et al. Research on crosswind stability control of high speed vehicle based on sliding mode theory[J]. Automotive Engineering. 2022, 44(1):123-130. | |
| 3 | KANG C, LEE M, CHUNG S. Multirate lane-keeping system with kinematic vehicle model [J]. IEEE Transactions on Vehicular Technology 2018, 10:9211-9222. |
| 4 | 唐斌, 尹玥, 江浩斌, 等. 基于RMPC的商用车车道保持跟踪控制[J]. 江苏大学学报(自然科学版), 2022, 43(3): 256-262. |
| TANG B, YIN Y, JIANG H, et al. Lane tracking control of commercial vehicle based on RMPC[J]. Journal of Jiangsu University(Natural Science Edit), 2022, 43(3): 256-262. | |
| 5 | 李绍松,郭孔辉,仇韬,等.极限工况下主动前轮转向汽车稳定性控制[J].汽车工程,2020,42(2):191-198. |
| LI S, GUO K, CHOU T,et al. Stability control of active front wheel steering vehicle under extreme conditions[J].Automotive Engineering. 2020,42(2):191-198. | |
| 6 | YU H, MEIER K, ARGYLE M, et al. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles[J]. IEEE-ASME Transactions on Mechatronics, 2015, 2: 541-552. |
| 7 | SUN X, CAI Y, WANG S, et al. Piecewise affine identification of tire longitudinal properties for autonomous driving control based on data-driven[J]. IEEE Access, 2018, 6:47424-47432. |
| 8 | DIAS J, PEREIRA G, PALHARES R. Longitudinal model identification and velocity control of an autonomous car [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 2:776-786. |
| 9 | YAO Y, XU X, YANG D, et al. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 4: 3740-3747. |
| 10 | 张新锋,姚蒙蒙,宋瑞,等. 基于AEKPF算法对锂离子电池SOC与SOH的联合估计[J]. 江苏大学学报(自然科学版), 2022, 43(1): 24-31. |
| ZHANG X, YAO M, SONG R, et al. Joint estimation of SOC and SOH for Li-ion battery based on AEKPF algorithm[J]. Journal of Jiangsu University(Natural Science Edit), 2022, 43(1): 24-31. | |
| 11 | SABET M, DANIALI T, FATHI H, et al. Identification of an autonomous underwater vehicle hydrodynamic model using the extended, cubature, and transformed unscented Kalman filter[J]. IEEE Journal of Oceanic Engineering, 2018, 2:457-467. |
| 12 | CHEN T, CHEN L, CAI Y, et al. Robust sideslip angle observer with regional stability constraint for an uncertain singular intelligent vehicle system[J]. IET Control Theory and Applications,2018, 13. |
| 13 | WANG Z, WU J, LEI Z. Vehicle sideslip angle estimation for a four-wheel-independent-drive electric vehicle based on a hybrid estimator and a moving polynomial Kalman smoother[J]. Proceedings of the Institution of Mechanical Engineers Part K: Journal of Multi-body Dynamics, 2018. |
| 14 | LI L, YANG M, WANG C,et al. Rigid point set registration based on cubature Kalman filter and its application in intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2018, 6: 1754-1765. |
| 15 | GUO H, LIU F, XU F. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation[J]. IEEE Transactions on Systems Man Cybernetics-Systems,2017:1-12. |
| 16 | 谷先广,孟科委,姚鑫鑫,等.基于组合聚类的智能汽车横向稳定性判别方法[J].汽车工程,2020,42(11):1497-1505. |
| GU X, MENG K, YAO X, et al. Discrimination method of lateral stability of intelligent vehicle based on combined clustering[J]. Automotive Engineering. 2020,42(11):1497-1505. | |
| 17 | 张雷,赵宪华,王震坡.四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J].汽车工程,2020,42(11):1513-1521. |
| ZHANG L, ZHAO X, WANG Z. Research on coordinated control of trajectory tracking and yaw stability of electric vehicle independently driven by four-wheel hub motor[J]. Automotive Engineering,2020,42(11):1513-1521. | |
| 18 | WANG J, JIA X, LI Z.Research and implementationof short text clustering based on improved K-means algorithm[J]. Information Technology, 2019,12: 76-80. |
| 19 | LIU Z, HUANG W, WANG L. Field wheat ear counting automatically based on improved K-means clustering algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering, 2009,35,3: 174-181. |
| 20 | ZHU Y, ZOU X, HUANG X, et al. Rapid detecting total acid content and classifying different types of vinegar based on near infrared spectroscopy and least-squares support vector machine[J]. J. Appl. Solution Chem. Model., 2013,2(1):25-32. |
| 21 | SUN X, HU W, CAI Y, et al. Identification of a piecewise affine model for the tire cornering characteristics based on experimental data[J]. Nonlinear Dynamics, 2020,101. |
| 22 | 付翔, 杨凤举, 黄斌, 等. 主动后轮转向四轮独立驱动车辆的协调控制[J]. 江苏大学学报(自然科学版), 2021, 42(5): 497-505. |
| FU X, YANG F, HUANG B, et al. Coordinated control of active rear wheel steering and four wheel independent driving vehicle[J]. Journal of JIangsu University(Natural Science Edit), 2021, 42(5): 497-505. | |
| 23 | SUN X, WANG Y, HU W. Estimation of longitudinal force, sideslip angle and yaw rate for four-wheel independent actuated autonomous vehicles based on PWA tire model[J]. Sensors,2022,22(9). |
| 24 | ZHANG H, XIE J, GE J, et al. Adaptive strong tracking square-root cubature Kalman filter for maneuvering aircraft tracking[J]. IEEE Access, 2018, 6: 10052-10061. |
| 25 | 周聪,肖建.改进强跟踪滤波算法及其在汽车状态估计中的应用[J].自动化学报,2012,38(9):1520-1527. |
| ZHOU C, XIAO J. Improved strong tracking filtering algorithm and its application in vehicle state estimation[J]. Acta Automatica Sinica, 2012,38(9):1520-1527. | |
| 26 | 袁朝春, 宋金行, 何友国,等. 基于行人轨迹预测的无人驾驶汽车主动避撞算法[J]. 江苏大学学报(自然科学版), 2021, 42(1): 1-8. |
| YUAN C, SONG J, HE Y, et al. Active collision avoidance algorithm of autonomous vehicle based on pedestrian trajectory prediction[J]. Journal of Jiangsu University(Natural Science Edit), 2021, 42(1): 1-8. |
| [1] | 陈建锋,吴强,葛新元,赵景波. 基于切换策略的车辆质心侧偏角高性能获取[J]. 汽车工程, 2024, 46(2): 346-355. |
| [2] | 刘济铮,王震坡,孙逢春,张雷. 异构智能网联汽车编队延迟补偿控制研究[J]. 汽车工程, 2023, 45(9): 1573-1582. |
| [3] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [4] | 马天飞,李波,朱冰,赵健. 考虑大气条件影响的自动泊车系统超声波雷达建模[J]. 汽车工程, 2023, 45(9): 1646-1654. |
| [5] | 李勇滔,孙晨旭,郑伟光,许恩永,李育方,王善超. 基于毫米波雷达与视觉融合的碰撞预警[J]. 汽车工程, 2023, 45(9): 1666-1676. |
| [6] | 刘卫国,项志宇,刘锐,李国栋,王子旭. 基于深度学习的端到端车辆运动规划方法研究[J]. 汽车工程, 2023, 45(8): 1343-1352. |
| [7] | 李达,邓钧君,张照生,刘鹏,王震坡. 电动车辆动力电池安全预警策略研究综述[J]. 汽车工程, 2023, 45(8): 1392-1407. |
| [8] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [9] | 袁侠义, 肖露. 四驱SUV车辆的高温瞬态热害仿真与优化研究[J]. 汽车工程, 2023, 45(7): 1254-1262. |
| [10] | 李海岩,黄盛一,李琨,崔世海,贺丽娟,吕文乐. 行人-车辆碰撞中六岁儿童下肢损伤分析及预测[J]. 汽车工程, 2023, 45(6): 1050-1061. |
| [11] | 康宇航,李韶华,杨泽坤. 基于相空间三维动态稳定域的重型车辆稳定性控制策略研究[J]. 汽车工程, 2023, 45(4): 637-646. |
| [12] | 李子先,潘世举,徐友春. 8轮分布式电驱动车辆AFS和DYC协同控制[J]. 汽车工程, 2023, 45(3): 409-420. |
| [13] | 张新荣,谭宇航,贾一帆,黄晋,许权宁. 四轮独立驱动电动汽车路径跟踪鲁棒控制[J]. 汽车工程, 2023, 45(2): 253-262. |
| [14] | 邹铁方,周靖. 参数扰动下基于制动控制的人地碰撞损伤防护风险[J]. 汽车工程, 2023, 45(2): 313-323. |
| [15] | 吕颖,祁旭,刘秋铮,王鑫煜,陈国迎. 考虑转向延迟特性的自动驾驶车辆路径跟踪控制方法[J]. 汽车工程, 2023, 45(12): 2234-2241. |
|