汽车工程 ›› 2025, Vol. 47 ›› Issue (5): 809-819.doi: 10.19562/j.chinasae.qcgc.2025.05.002
高凯1,2,刘欣宇2,胡林2( ),黄向明1(),邹铁方2,刘鹏3
),黄向明1(),邹铁方2,刘鹏3
收稿日期:2024-08-14
修回日期:2024-11-27
出版日期:2025-05-25
发布日期:2025-05-20
通讯作者:
胡林,黄向明
E-mail:hulin@csust.edu.cn;h_xiangming@aliyun.com
基金资助:
Kai Gao1,2,Xinyu Liu2,Lin Hu2(),Xiangming Huang1(),Tiefang Zou2,Peng Liu3
Received:2024-08-14
Revised:2024-11-27
Online:2025-05-25
Published:2025-05-20
Contact:
Lin Hu,Xiangming Huang
E-mail:hulin@csust.edu.cn;h_xiangming@aliyun.com
摘要:
在混合交通环境中,准确预测周边车辆轨迹对自动驾驶汽车安全至关重要。然而,现有技术在长时预测方面仍存在精度低和计算量大的问题。本文提出了一种结合意图概率的时空交互稀疏注意力模型,通过高效的编码-解码结构进行轨迹预测。模型首先构建位置掩码矩阵提取历史轨迹中的位置信息,利用稀疏注意力机制筛选出关键特征,并通过意图行为分析模块提高意图识别的准确率。最终将时空特征、位置特征和意图特征融合输入解码器,以多任务学习方式训练模型。试验结果表明,该模型在HighD和NGSIM数据集上相较于当前最优算法,在3~5 s长时预测的均方根误差均有降低,显著提升了预测效果。此外,通过实车试验对模型在实际场景中的表现进行验证,进一步展示了其在复杂交通环境中的应用潜力。
高凯,刘欣宇,胡林,黄向明,邹铁方,刘鹏. 基于稀疏注意力的时空交互车辆轨迹预测[J]. 汽车工程, 2025, 47(5): 809-819.
Kai Gao,Xinyu Liu,Lin Hu,Xiangming Huang,Tiefang Zou,Peng Liu. Vehicle Trajectory Prediction with Spatial-Temporal Interaction Based on Sparse Attention[J]. Automotive Engineering, 2025, 47(5): 809-819.
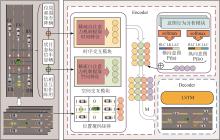
图 1
STEI模型整体框架"
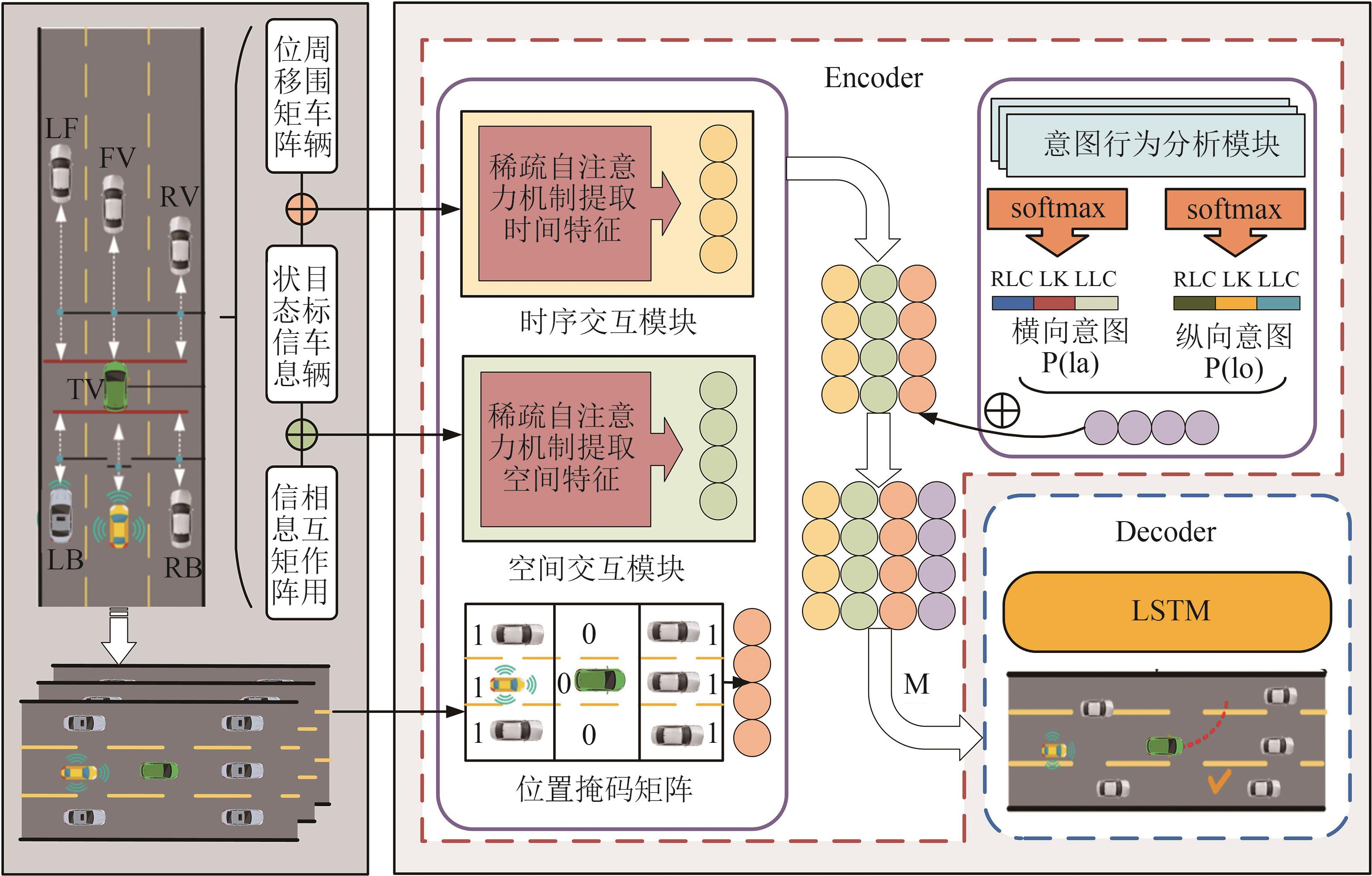
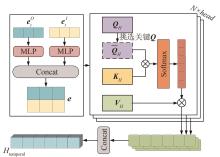
图2
时间交互稀疏注意力模块"
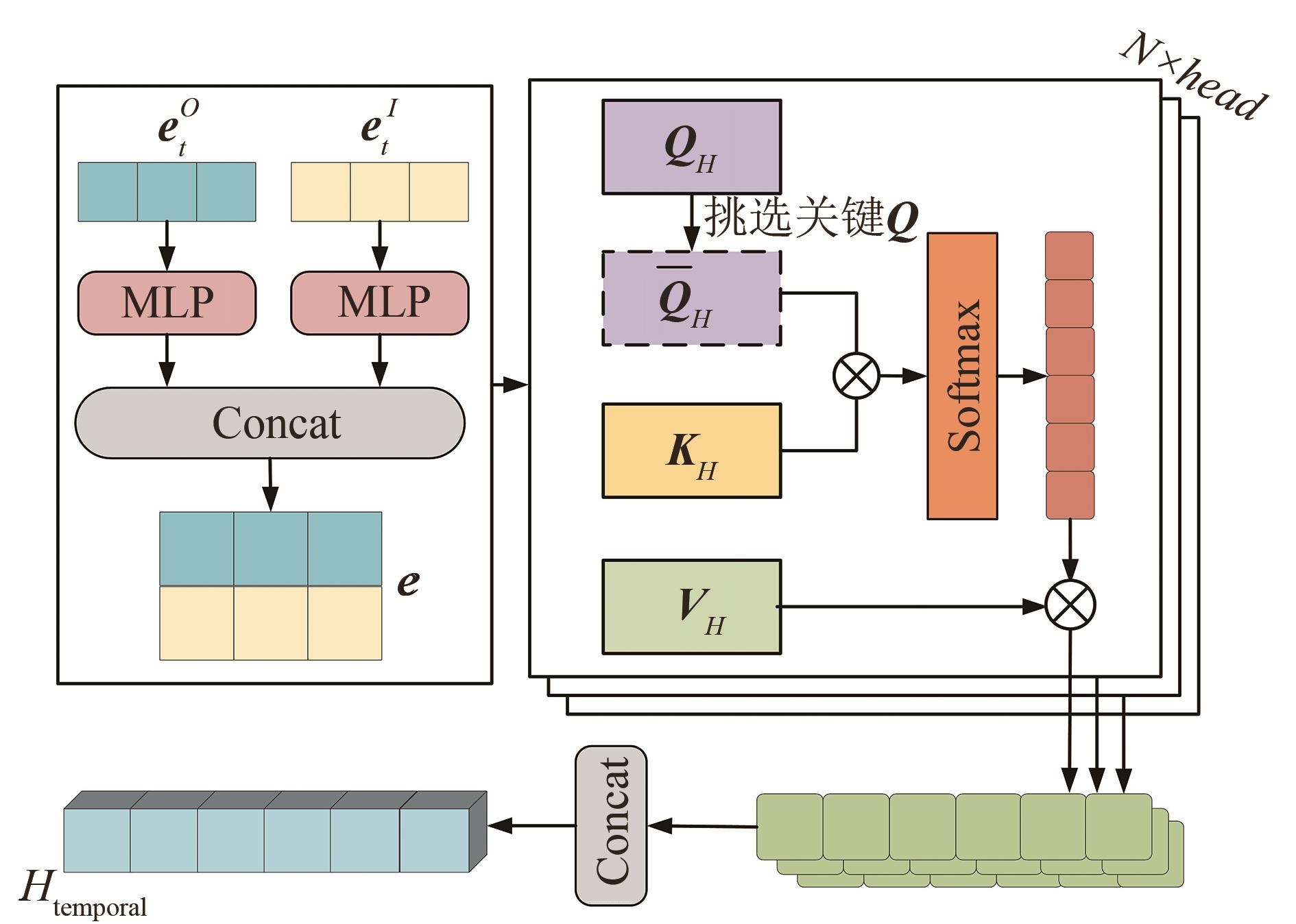
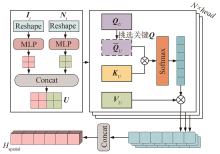
图3
空间交互稀疏注意力模块"
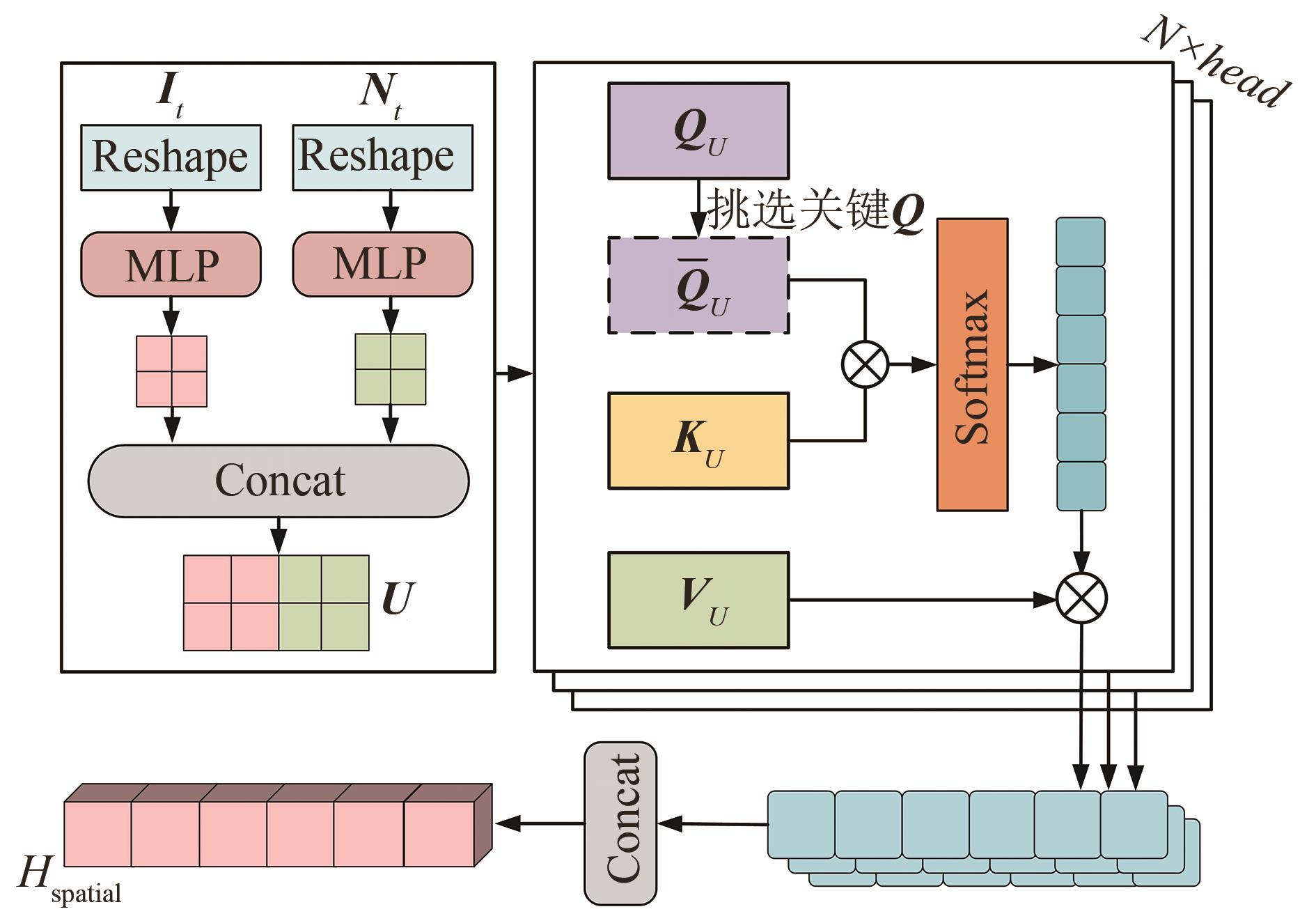

图 4
意图行为分析模块"
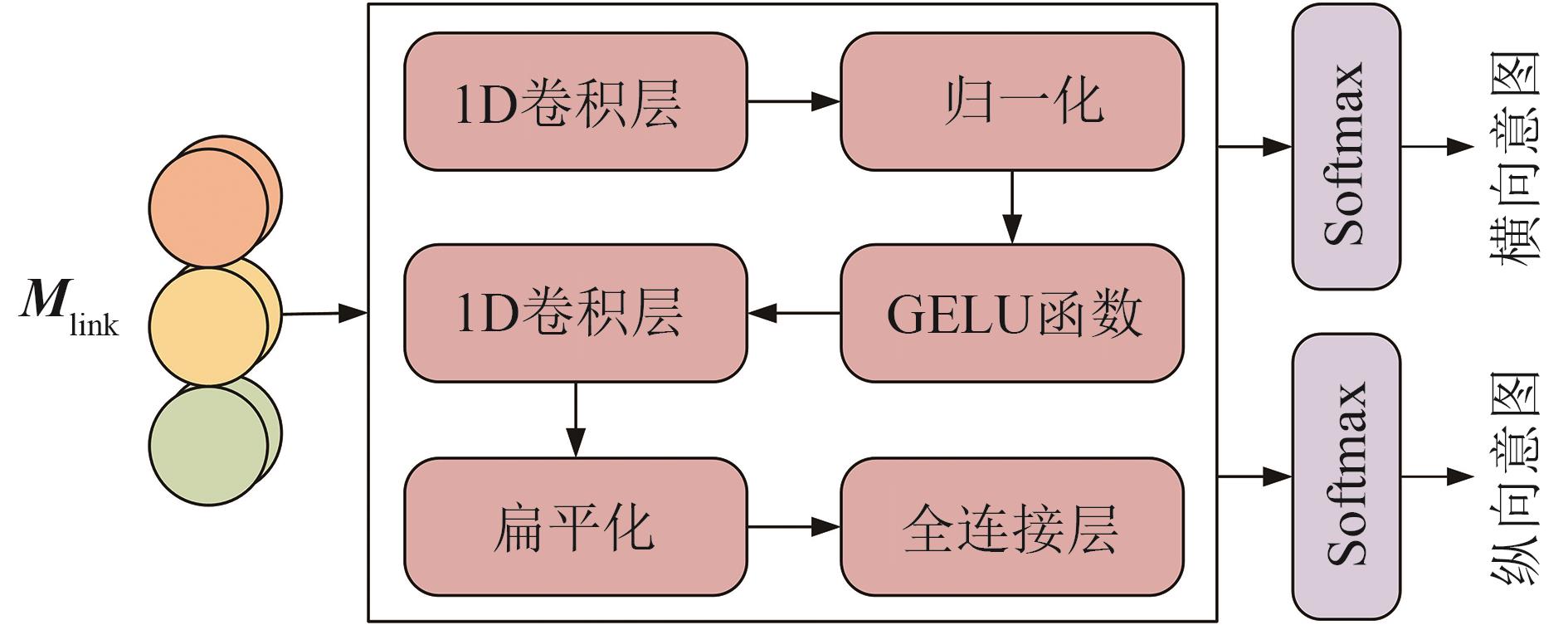
表1
STEI模型参数"
| 参数 | 数值 |
|---|---|
| 输入长度 | 15 |
| 输出长度 | 25 |
| Batch_size | 128 |
| 学习率 | 0.001 |
| Epoch | 2 000 |
| Dropout | 0.1 |
| 头部数目(h) | 5 |
| 特征数(n_features) | 26 |
| 优化算法 | Adam |
| 停止迭代 | 100 patience |
| 损失函数 | NLL |
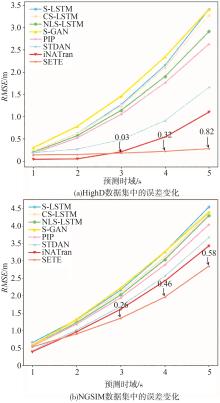
图5
不同模型在公开数据集预测误差随时间变化情况"

表2
不同模型在HighD和NGSIM数据集上的RMSE对比"
| 数据集 | 预测时长/s | S-LSTM | CS-LSTM | NLS-LSTM | S-GAN | PIP | STDAN | iNATran | STEI |
|---|---|---|---|---|---|---|---|---|---|
| HighD | 1 | 0.22 | 0.22 | 0.2 | 0.3 | 0.17 | 0.19 | 0.04 | 0.14 |
| 2 | 0.62 | 0.61 | 0.57 | 0.78 | 0.52 | 0.27 | 0.05 | 0.15 | |
| 3 | 1.27 | 1.24 | 1.14 | 1.46 | 1.05 | 0.48 | 0.21 | 0.18↓ | |
| 4 | 2.15 | 2.1 | 1.9 | 2.34 | 1.76 | 0.91 | 0.54 | 0.22↓ | |
| 5 | 3.41 | 3.27 | 2.91 | 3.41 | 2.63 | 1.66 | 1.10 | 0.28↓ | |
| NGSIM | 1 | 0.65 | 0.61 | 0.56 | 0.57 | 0.55 | 0.42 | 0.39 | 0.53 |
| 2 | 1.31 | 1.27 | 1.22 | 1.32 | 1.18 | 1.01 | 0.96 | 0.90 | |
| 3 | 2.16 | 2.09 | 2.02 | 2.22 | 1.94 | 1.69 | 1.61 | 1.35↓ | |
| 4 | 3.25 | 3.10 | 3.03 | 3.26 | 2.88 | 2.56 | 2.42 | 1.96↓ | |
| 5 | 4.55 | 4.37 | 4.30 | 4.40 | 4.04 | 3.67 | 3.43 | 2.85↓ |

图6
本文模型在测试集中的轨迹预测误差分布"
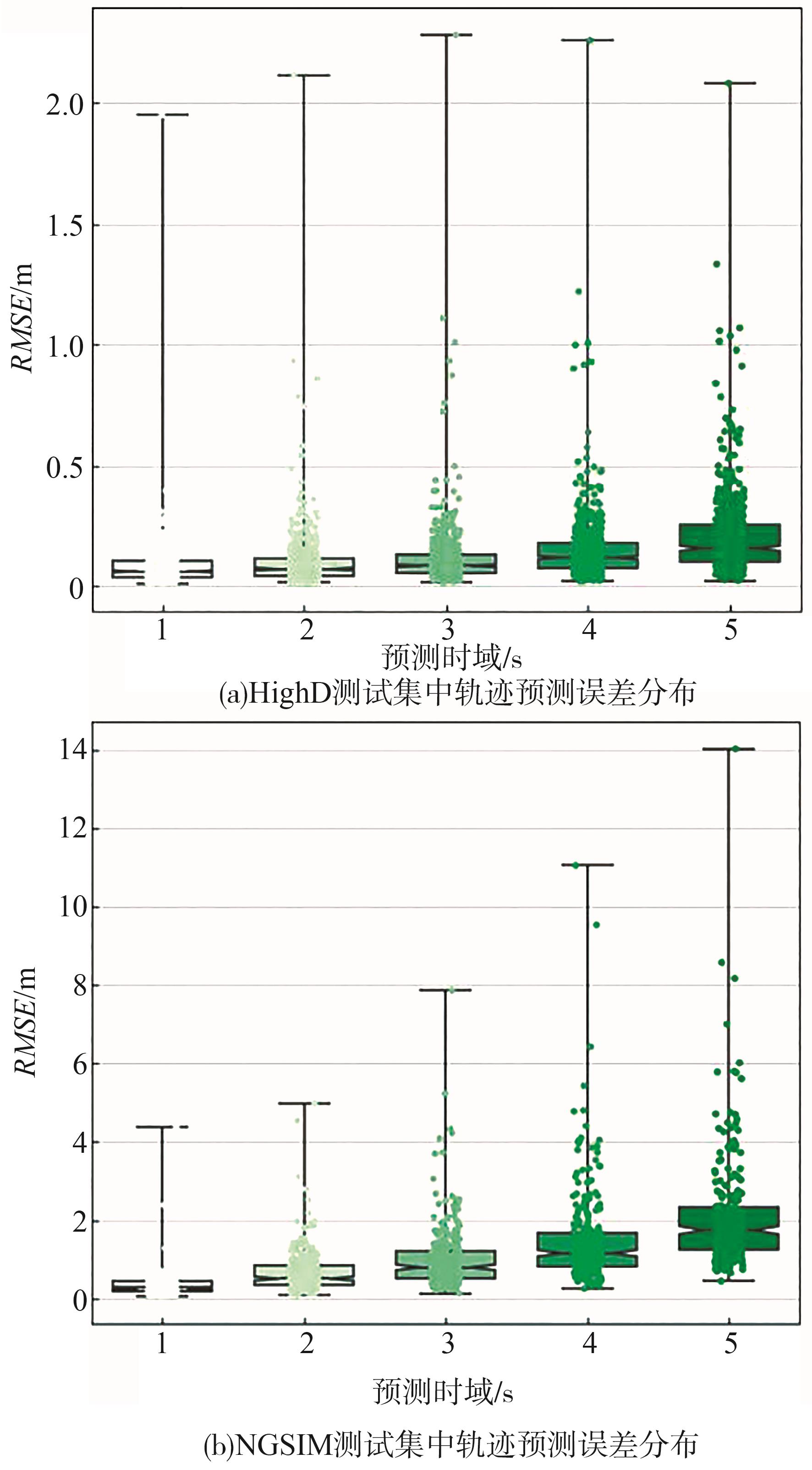
表3
模型复杂度对比"
| 模型 | Time | Memory | Flops/M | Params/M |
|---|---|---|---|---|
| 稀疏注意力 | 3.32 | 0.53 | ||
| 多头注意力 | 3.53 | 0.65 |
表4
移除模型各模块后RMSE和推理时间对比"
| 模块 | 1 s | 2 s | 3 s | 4 s | 5 s | 推理时间/ms |
|---|---|---|---|---|---|---|
| 移除IA | 0.21 | 0.22 | 0.24 | 0.28 | 0.36 | 0.18 |
| 移除PM | 0.18 | 0.20 | 0.24 | 0.28 | 0.35 | 0.19 |
| 移除 TE | 0.20 | 0.21 | 0.23 | 0.27 | 0.33 | 0.15 |
| 移除 SE | 0.28 | 0.30 | 0.31 | 0.36 | 0.44 | 0.16 |
| STEI | 0.14 | 0.15 | 0.18 | 0.22 | 0.28 | 0.21 |
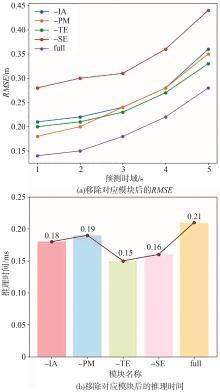
图7
消融试验影响分析"
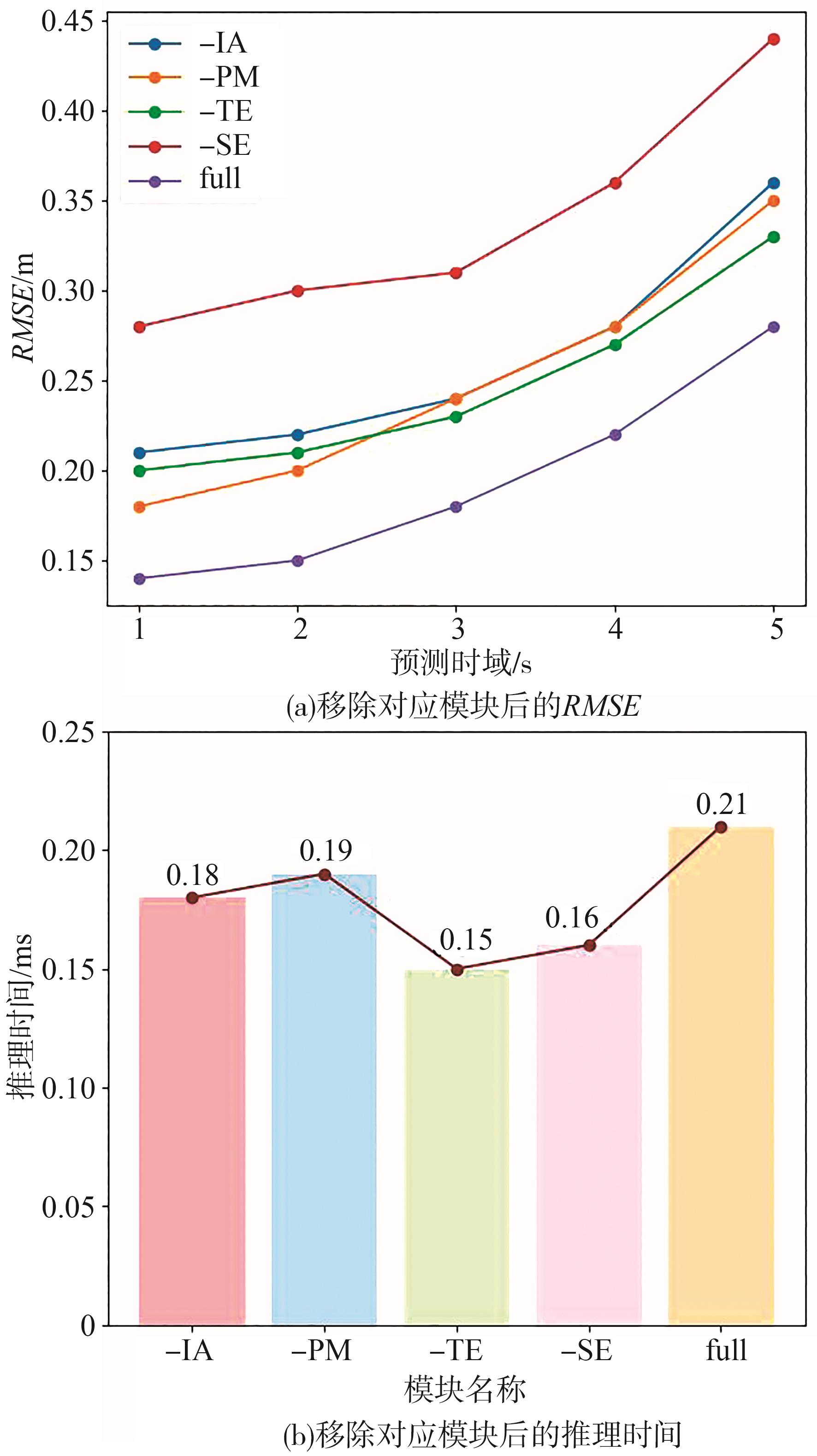
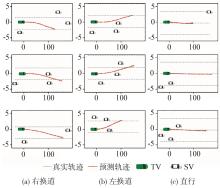
图8
模型预测的目标车辆轨迹结果可视化"
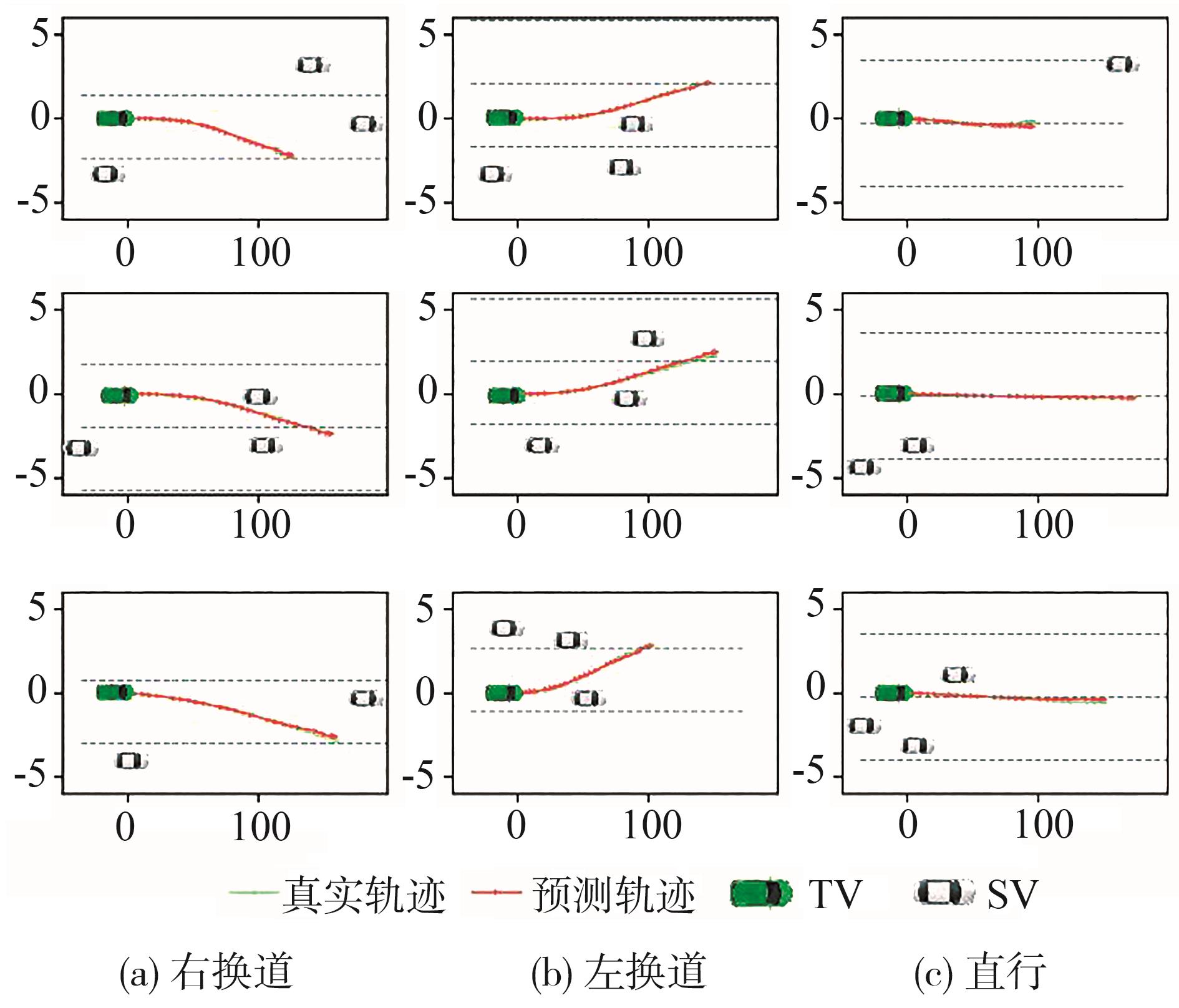

图9
试验场景设置"

表5
实车试验结果"
| 场景 | 轨迹预测 | 意图预测 | |||
|---|---|---|---|---|---|
| Lateral | Longitudinal | Lateral | Longitudinal | ||
右 换 道 | 1 s | 0.16 | 3.89 | RLC预测值 | CON预测值 |
| 2 s | 0.18 | 4.44 | 99.93% | 100% | |
| 3 s | 0.20 | 5.01 | 真实标签 | 真实标签 | |
| 4 s | 0.23 | 5.59 | RLC | CON | |
| 5 s | 0.27 | 6.16 | √ | √ | |
左 换 道 | 1 s | 0.031 | 4.66 | LLC预测值 | DEC预测值 |
| 2 s | 0.040 | 5.18 | 99.98% | 55.43% | |
| 3 s | 0.053 | 5.72 | 真实标签 | 真实标签 | |
| 4 s | 0.069 | 6.30 | LLC | DEC | |
| 5 s | 0.084 | 6.83 | √ | √ | |
不 换 道 | 1 s | 0.075 | 4.54 | LK预测值 | CON预测值 |
| 2 s | 0.070 | 5.01 | 98.69% | 99.99% | |
| 3 s | 0.061 | 5.47 | 真实标签 | 真实标签 | |
| 4 s | 0.067 | 5.97 | LK | CON | |
| 5 s | 0.056 | 6.47 | √ | √ | |
| 1 | GOLI S A, FAR B H, FAPOJUWO A O. Vehicle trajectory prediction with Gaussian process regression in connected vehicle environment[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2018: 550-555. |
| 2 | HUBMANN C, SCHULZ J, BECKER M, et al. Automated driving in uncertain environments: planning with interaction and uncertain maneuver prediction[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3 (1): 5-17. |
| 3 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971. |
| 4 | 季学武,费聪,何祥坤,等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报,2019,32(6): 34-42. |
| JI X W, FEI C, HE X K, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. | |
| 5 | FEI C, HE X K, JI X. Multi-modal vehicle trajectory prediction based on mutual information[J]. IET Intelligent Transport Systems, 2020, 14(3): 148-153. |
| 6 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971. |
| 7 | XIN L, WANG P, CHAN C, et al. Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks[C]. 21st International Conference on Intelligent Transportation Systems. New York: IEEE, 2018: 1441-1446. |
| 8 | HOU L, XIN L, LE S E, et al. Interactive trajectory prediction of surrounding road users for autonomous driving using structural LSTM network[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(11): 4615-4625. |
| 9 | KIM B, KANG C M, KIM J, et al. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network[C]. IEEE 20th International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 399-404. |
| 10 | WU Y, CHEN G, LI Z, et al. HSTA: a hierarchical spatio-temporal attention model for trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11295-11307. |
| 11 | MO X Y, XING Y, LV C. Interaction-aware trajectory prediction of connected vehicles using CNN-LSTM networks[C]. 46th Annual Conference of the IEEE-Industrial- Electronics Society (IECON). New York: IEEE, 2020: 5057-5062. |
| 12 | XIE G, SHANGGUAN A, FEI R, et al. Motion trajectory prediction based on a CNN-LSTM sequential model[J]. Science China Information Sciences, 2020, 63(11): 1-21. |
| 13 | MUKHERJEE S, WANG S, WEALLACE A. Interacting vehicle trajectory prediction with convolutional recurrent neural networks[C]. IEEE International Conference on Robotics and Automation. New York: IEEE, 2020: 4336-4342. |
| 14 | 高凯,李勋豪,胡林,等. 基于多头注意力的CNN-LSTM的换道意图预测[J]. 机械工程学报,2022,58(22):369-378. |
| GAO K, LI X H, HU L, et al. Lane change intention prediction of CNN-LSTM based on multi-head attention[J]. Journal of Mechanical Engineering, 2022, 58(22): 369-378. | |
| 15 | 金立生,高 铭,郭柏苍,等.基于时空融合 LSTM 网络的驾驶视角轨迹预测[J].中国公路学报,2022,35(4):325-332. |
| JIN L S, GAO M, GUO B C, et al, Driver perspective trajectory prediction based on spatiotemporal fusion LSTM network [J]. China Journal of Highway and Transport, 2022, 35(4): 325-332. | |
| 16 | 曹昊天,施惠杰,宋晓琳,等.基于多特征融合的行人意图以及行人轨迹预测方法研究[J].中国公路学报,2022,35(10):308-318. |
| CAO H T, SHI H J, SONG X L, et al. Prediction of pedestrian intention and trajectory based on multi-feature fusion [J]. China Journal of Highway and Transport, 2022, 35(10): 308-318. | |
| 17 | LI C, LIU Z W, ZHANG J Y, et al. Two-stream LSTM network with hybrid attention for vehicle trajectory prediction [C]. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2022: 1927-1934. |
| 18 | FU M, ZHANG T, SONG W, et al. Trajectory prediction-based local spatio-temporal navigation map for autonomous driving in dynamic highway environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(7): 6418-6429. |
| 19 | CAI Y, WANG Z, WANG H, et al. Environment-attention network for vehicle trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11216-11227. |
| 20 | BECKER S, HUG R, HUBNER W, et al. An evaluation of trajectory prediction approaches and notes on the trajnet benchmark [J/OL]. Computer Vision and Pattern Recognition, 2022. https://arxiv. org/abs/1805.07663. |
| 21 | GIULIARI F, HASAN I, CRISTANI M, et al. Transformer networks for trajectory forecasting[C]. 2020 25th International Conference on Pattern Recognition (ICPR). New York: IEEE, 2021: 10335-10342. |
| 22 | HOU L, LI S E, YANG B, et al. Structural transformer improves speed-accuracy trade-off in interactive trajectory prediction of multiple surrounding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24778-24790. |
| 23 | 刘占文,李文倩,林杉,等. 基于稀疏权重共享的多模态轨迹预测[J]. 中国公路学报,2023,36(9): 244-256. |
| LIU Z W, LI W Q, LIN S, et al. Multimodal trajectory prediction based on sparse weight sharing[J]. China Journal of Highway and Transport, 2023, 36(9): 244-256. | |
| 24 | GOLI S A, FAR B H, FAPOJUWO A O. Vehicle trajectory prediction with Gaussian process regression in connected vehicle environment[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2018: 550-555. |
| 25 | 李文礼,韩迪,石晓辉,等. 基于时-空注意力机制的车辆轨迹预测[J]. 中国公路学报, 2023,36(1): 226-239. |
| LI W L, HAN D, SHI X H, et al. Vehicle trajectory prediction based on spatial-temporal attention mechanism[J]. China Journal of Highway and Transport, 2023, 36(1): 226-239. | |
| 26 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. Advances in Neural Information Processing Systems (NIPS). New York: NIPS, 2017: 5998-6008. |
| 27 | ZHOU H, ZHANG S, PENG J, et al. Informer: beyond efficient transformer for long sequence time-series forecasting[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(12): 11106-11115. |
| 28 | ZHAO M, ZHONG S, FU X, et al. Deep residual networks with adaptively parametric rectifier linear units for fault diagnosis[J]. IEEE Transactions on Industrial Electronics, 2020, 68(3): 2587-2597. |
| 29 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highd dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2018: 2118-2125. |
| 30 | COLYAR J,HALKIAS J. Us highway 101 dataset[R]. Federal Highway Administration (FHWA), Tech. Rep. FHWA-HRT-07-030, 2007:27-69. |
| 31 | ABADI M, AGARWAL A, BARHAM P, et al. Tensorflow: large-scale machine learning on heterogeneous distributed systems[J]. arXiv preprint arXiv:, 2016. |
| 32 | LI Z, WANG Y, ZUO Z. Interaction-aware prediction for cut-in trajectories with limited observable neighboring vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(3): 2148-2161. |
| 33 | SONG H,DING W,CHEN Y,et al. Pip: planning-in-formed trajectory prediction for autonomous driving [C]. Computer Vision-ECCV 2020: 16th European Conference. Berlin: Springer International Publishing, 2020:598-614. |
| 34 | ALAHI A,GOEL K,RAMANATHAN V,et al. Social LSTM: human trajectory prediction in crowded spaces[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971. |
| 35 | DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE, 2018: 1468-1476. |
| 36 | MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Non-local social pooling for vehicle trajectory prediction[C]. 2019 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2019: 975-980. |
| 37 | GUPTA A, JOHNSON J, FEI-FEI L, et al. Social GAN: socially acceptable trajectories with generative adversarial networks[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2018: 2255-2264. |
| 38 | CHEN X, ZHANG H, ZHAO F, et al. Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19471-19483. |
| 39 | CHEN X, ZHANG H, ZHAO F, et al. Vehicle trajectory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for internet of vehicles[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-12. |
| 40 | DEO N, WOLFF E, BEIJBOM O. Multimodal trajectory prediction conditioned on lane-graph traversals[C]. Conference on Robot Learning. New York: PMLR, 2022: 203-212. |
| [1] | 刘宸宇,王海,蔡英凤,陈龙. 面向自动驾驶道路场景的相机与毫米波融合的多目标检测算法[J]. 汽车工程, 2025, 47(5): 829-838. |
| [2] | 秦启瑞,王海,蔡英凤,陈龙,李祎承. 基于实例激活图的自动驾驶实时实例分割算法[J]. 汽车工程, 2025, 47(4): 614-624. |
| [3] | 李道飞,潘豪. 场景复杂度评估在轨迹预测和驾驶决策中的应用[J]. 汽车工程, 2024, 46(9): 1556-1563. |
| [4] | 朱冰,范天昕,赵健,张培兴,宋东鉴,薛越,赵文博. 自动驾驶拟人连续交互测试场景生成方法[J]. 汽车工程, 2024, 46(9): 1600-1607. |
| [5] | 陶乐,王海,蔡英凤,陈龙. 面向自动驾驶场景的多目标点云检测算法[J]. 汽车工程, 2024, 46(7): 1208-1218. |
| [6] | 李琳辉,付一帆,王霆,王雪成,连静. 引入自监督预训练的轨迹预测方法[J]. 汽车工程, 2024, 46(7): 1219-1227. |
| [7] | 王海,张桂荣,罗彤,邱梦,蔡英凤,陈龙. 面向自动驾驶道路场景中异常案例的多模态数据挖掘算法[J]. 汽车工程, 2024, 46(7): 1239-1248. |
| [8] | 杨志刚,李俣静,夏超,王梦佳,余磊. 基于LSTM-POD的汽车湍流尾迹的高时间分辨速度场重构[J]. 汽车工程, 2024, 46(7): 1302-1313. |
| [9] | 黄晶,刘祥臻,邓潇阳,陈然. 基于多模态轨迹预测的智能车轨迹规划研究[J]. 汽车工程, 2024, 46(6): 965-974. |
| [10] | 曾娟,王昊,许博,张洪昌. 基于强弱感知设计的驾驶员危险感知状态识别模型研究[J]. 汽车工程, 2024, 46(6): 995-1005. |
| [11] | 梁弘毅,陈继开,刘万里,兰凤崇,莫丙达,陈吉清. 融合K-means聚类和序列分解的实车锂电池剩余使用寿命预测[J]. 汽车工程, 2024, 46(4): 634-642. |
| [12] | 周亦威,夏莫,朱冰. 城市道路场景下考虑多类交通参与者的多模态车辆轨迹预测方法研究[J]. 汽车工程, 2024, 46(3): 396-406. |
| [13] | 桑海峰,赵梓杉,王金玉,陈旺兴. 基于车辆轨迹预测对抗性攻击与鲁棒性研究[J]. 汽车工程, 2024, 46(3): 407-417. |
| [14] | 高嵩,周江邻,高博麟,芦健,王鹤,徐月云. 基于多信息融合网络的行人轨迹预测方法[J]. 汽车工程, 2024, 46(11): 1973-1982. |
| [15] | 石琴,李志伟,程腾,张强,王文冲. 基于证据深度学习的CAN网络入侵检测框架[J]. 汽车工程, 2024, 46(11): 2039-2045. |
|
||