汽车工程 ›› 2025, Vol. 47 ›› Issue (7): 1335-1343.doi: 10.19562/j.chinasae.qcgc.2025.07.011
• • 上一篇
朱冰,黄殷梓,赵健( ),张培兴,高质桐,薛经纬
),张培兴,高质桐,薛经纬
Bing Zhu,Yinzi Huang,Jian Zhao(),Peixing Zhang,Zhitong Gao,Jingwei Xue
摘要:
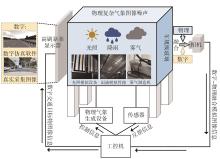
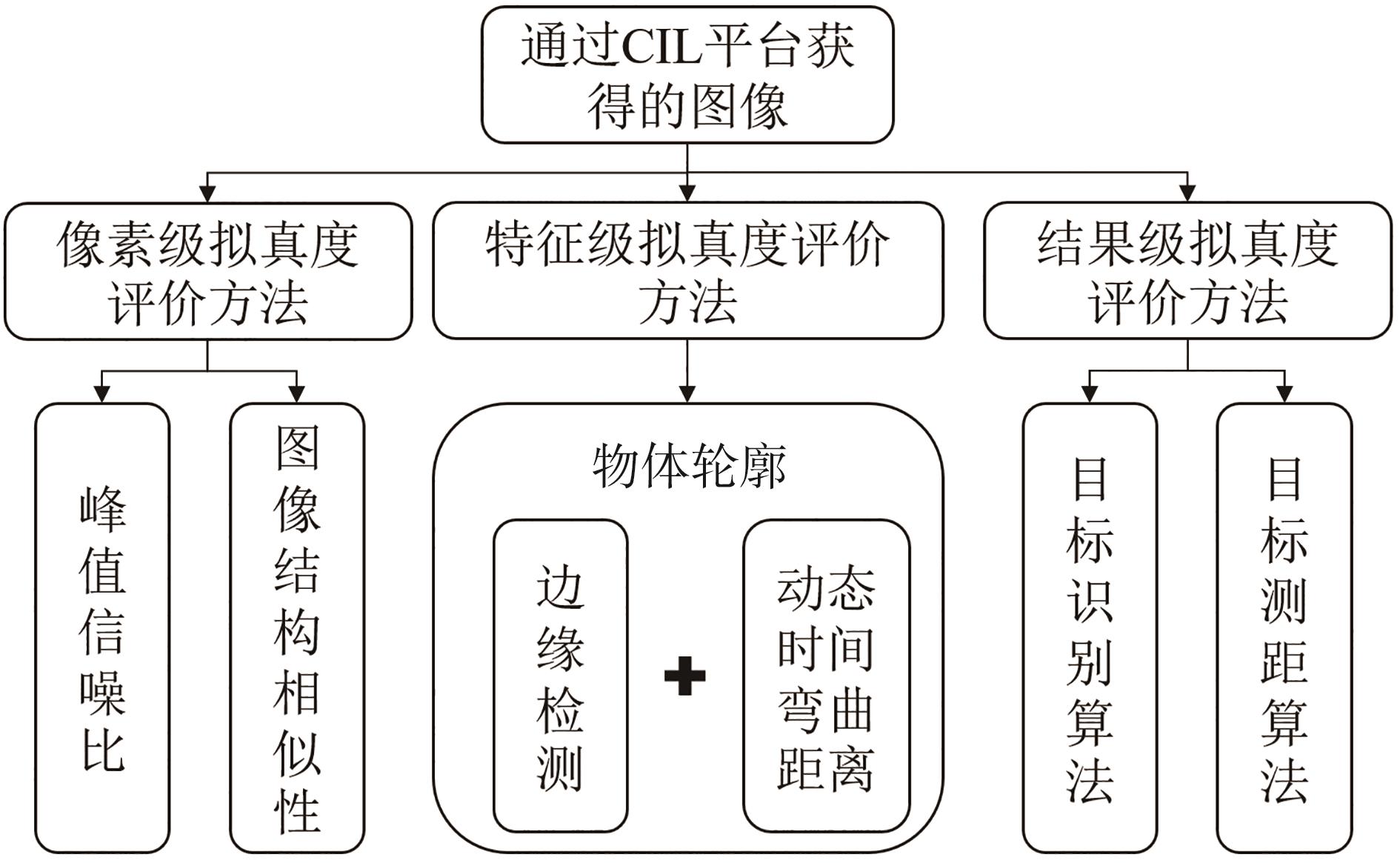
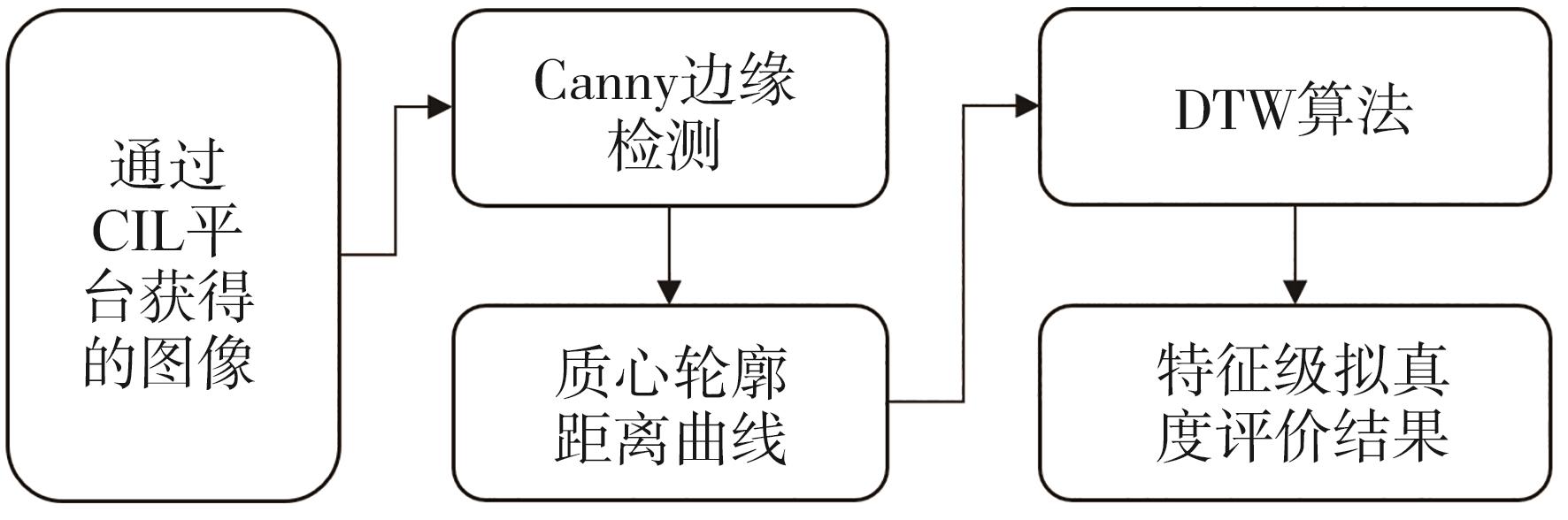
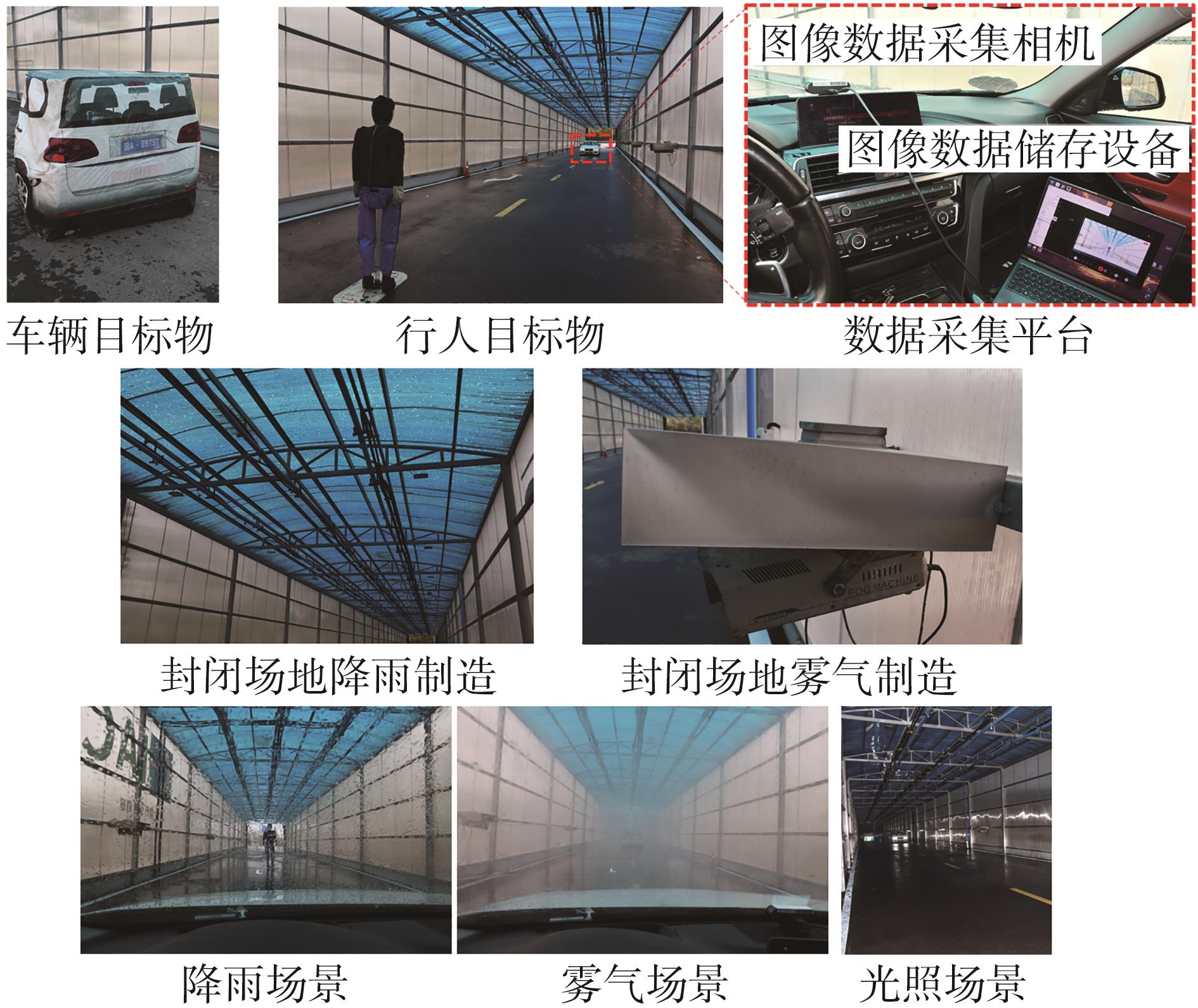
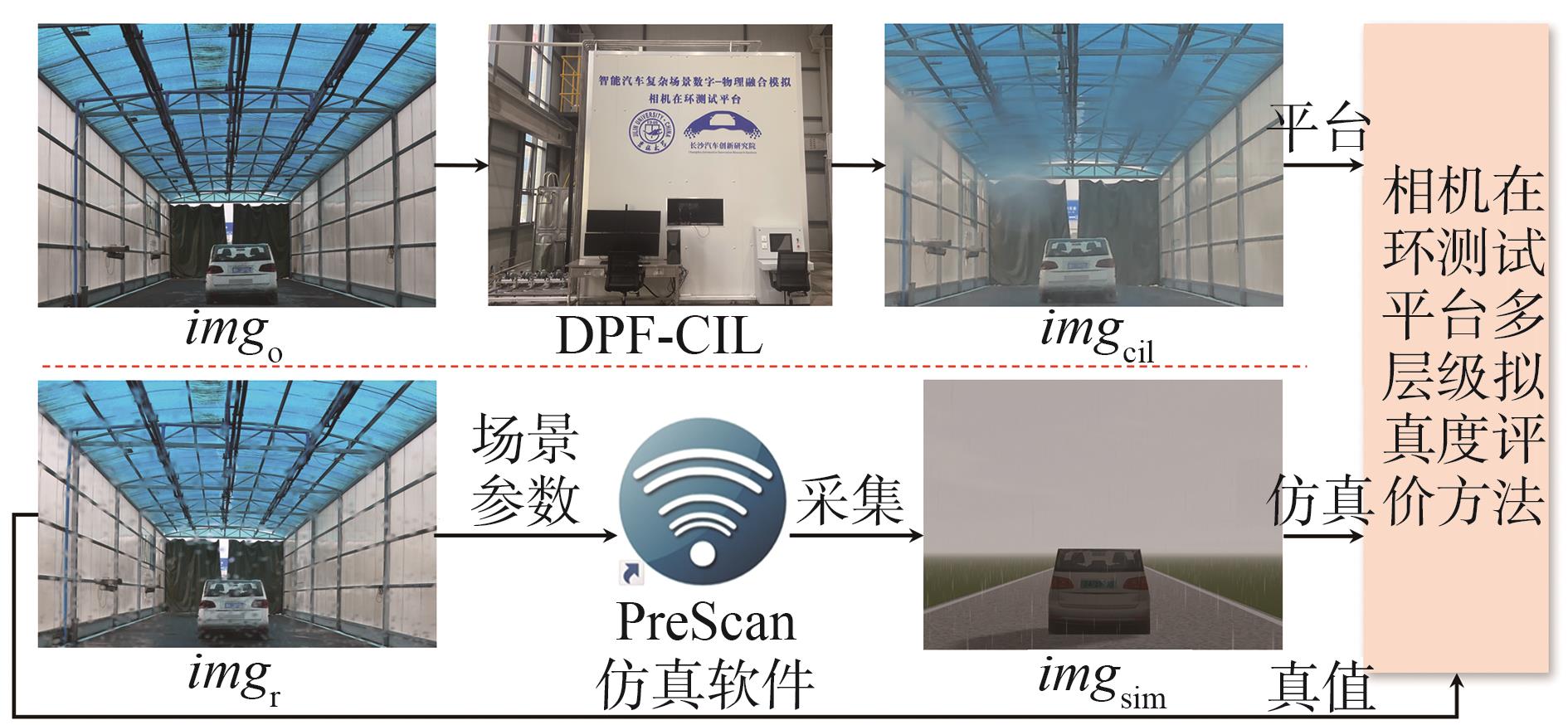
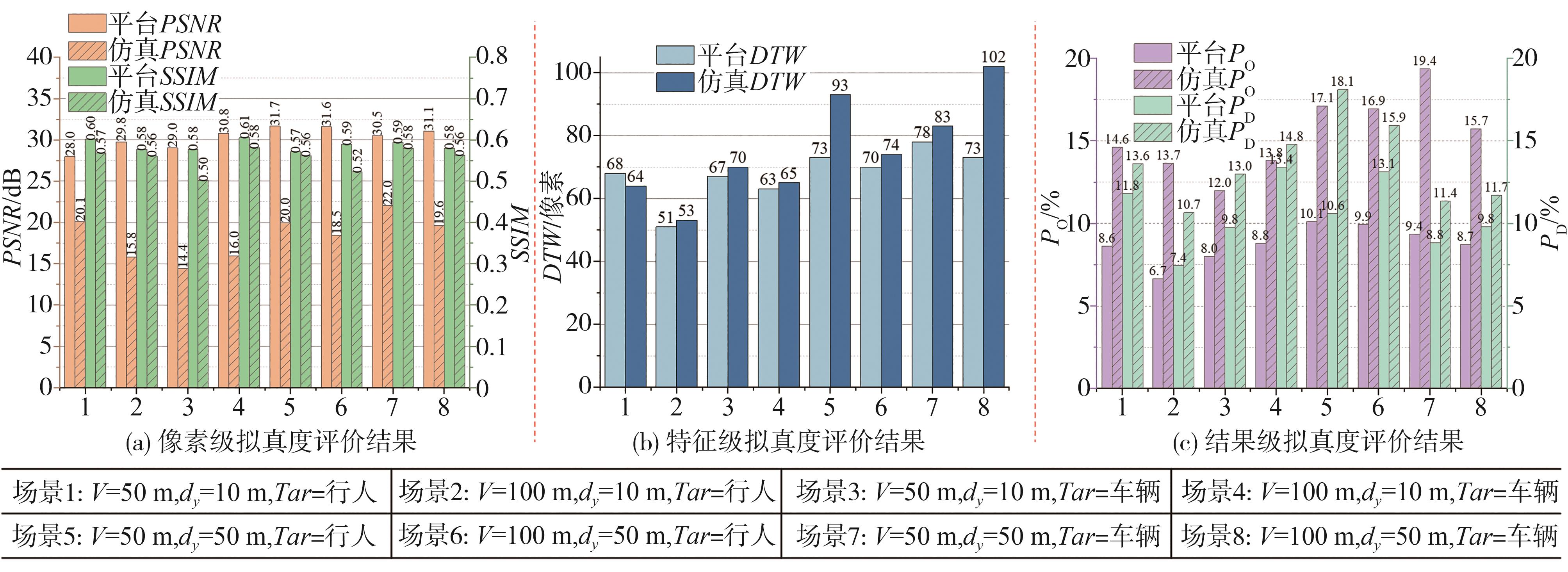
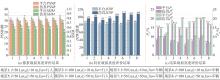
测试相机在复杂气象场景下的性能对提高智能汽车环境适应性具有重要意义。然而,利用数字仿真软件对相机进行测试时存在图像拟真度差的问题,而物理实景测试存在测试成本高、周期长且场景难以精准可控复现的缺点。对此,本文提出一种基于复杂气象数字-物理融合模拟的智能汽车相机在环测试方法,将相机硬件嵌入到数字仿真目标物与物理复杂气象实体共同构成的虚实融合测试环境中对智能汽车相机进行测试。首先,设计并构建复杂气象数字-物理融合模拟相机在环测试平台;其次,从像素级、特征级和结果级3个层级建立面向相机在环测试平台的多层级拟真度评价方法;结果表明,在雨、雾和光照等复杂气象场景的测试中本文提出的相机在环测试方法能够模拟的图像结构最小相似性和峰值信噪比分别为0.571 1和27.991 1 dB,所能够保留目标物体的轮廓信息与真实环境相比最大差距为88像素。在测试目标识别和测距功能时,最大结果差异分别为10.10%和13.39%。多层级拟真度评价结果表明,该测试方法在同等场景条件下优于纯数字仿真方法;相较于物理实景测试,该测试方法具有测试成本低、效率高以及复杂气象场景参数精准可控等优势。