汽车工程 ›› 2023, Vol. 45 ›› Issue (10): 1933-1943.doi: 10.19562/j.chinasae.qcgc.2023.10.014
所属专题: 智能网联汽车技术专题-规划&决策2023年
任明辉1,梁军1( ),陈龙1,张春2,王云2
),陈龙1,张春2,王云2
Minghui Ren1,Jun Liang1(),Long Chen1,Chun Zhang2,Yun Wang2
摘要:
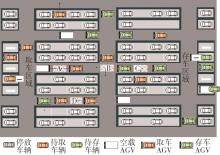
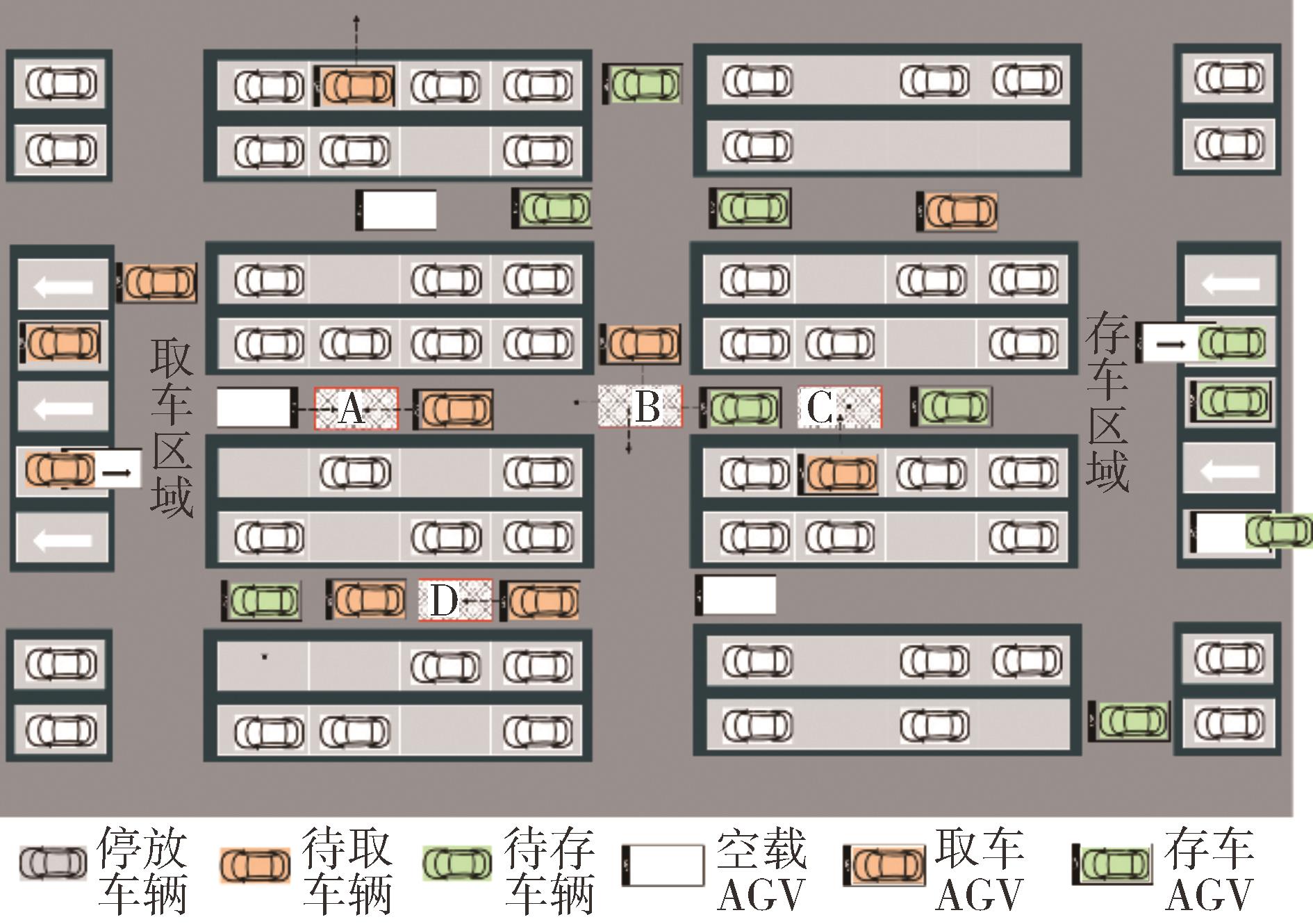
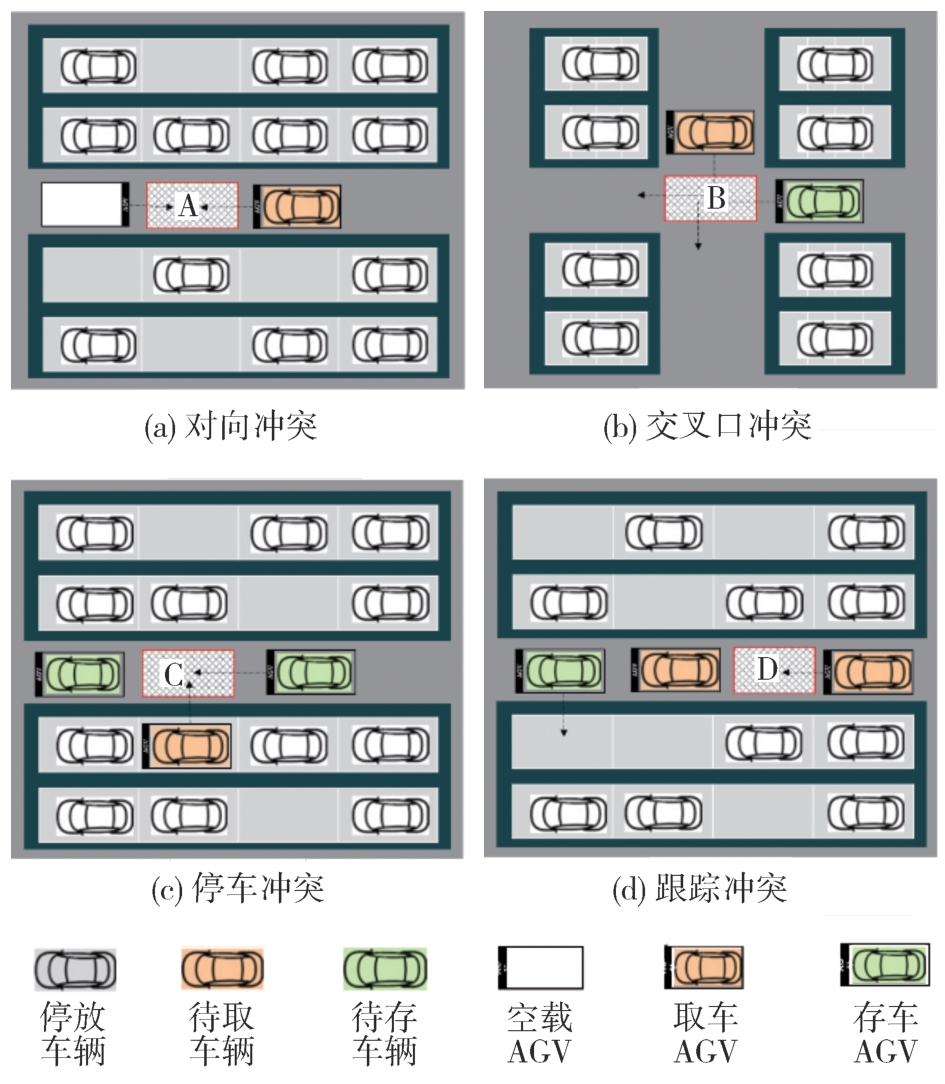
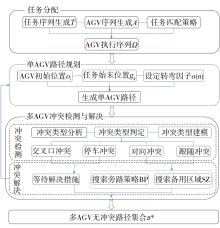
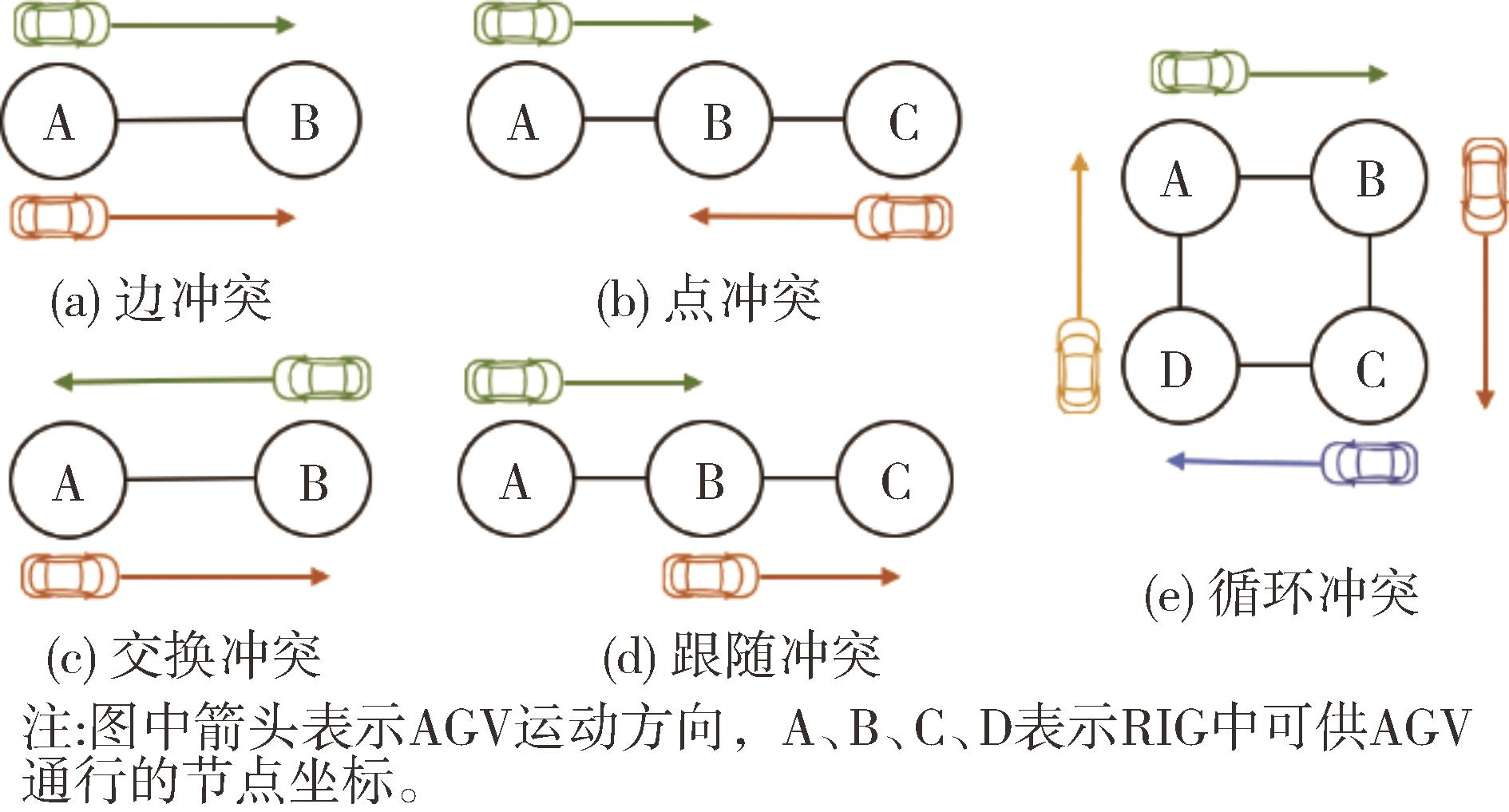
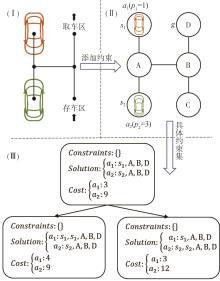
智能车库中多自主引导车(automated guided vehicle, AGV)的路径规划问题直接影响存取车的效率和安全性。针对智能车库中AGV的任务执行优先级问题,提出了基于改进冲突搜索的路径规划模型(improved conflict-based search with priority, iCBS-pri),该改进模型主要由任务分配(task allocation, TA)、单AGV路径规划(path planning, PP)、多AGV冲突检测与解决(conflict detection and resolution, CDAR)3个模块组成,TA模块将未分配任务分配给AGV,PP模块通过设置直线惩罚函数,减少路径的转弯次数对AGV运行时间的影响以提高AGV任务完成效率,CDAR模块包括冲突检测(conflict detection,CD)子模块和冲突解决(conflict resolution, CR)子模块,CR子模块针对CD子模块检测出的冲突类型,制定基于备用区域(spare zone, SZ)和旁路规划(bypass, BP)的冲突解决策略,以规划多AGV无冲突路线。仿真实验验证了典型场景下的该模型,结果表明:(1)PP模块所提改进A*相较于传统A*算法在路径长度和拐点数量分别减少8.82%和38.62%;(2)任务分配算法的分配成功率达到100%,任务一致性的概率达88.9%;(3)iCBS-pri算法在任务规划成功率方面比iCBS算法平均提升11.3%,算法平均运行时间提升5.93%,进一步提升了智能车库存取车效率。