汽车工程 ›› 2021, Vol. 43 ›› Issue (5): 721-729.doi: 10.19562/j.chinasae.qcgc.2021.05.011
钟龙飞,彭育辉( ),江铭
),江铭
收稿日期:2020-10-14
修回日期:2021-01-04
出版日期:2021-05-25
发布日期:2021-05-18
通讯作者:
彭育辉
E-mail:pengyuhui@fzu.edu.cn
基金资助:
Longfei Zhong,Yuhui Peng(),Ming Jiang
Received:2020-10-14
Revised:2021-01-04
Online:2021-05-25
Published:2021-05-18
Contact:
Yuhui Peng
E-mail:pengyuhui@fzu.edu.cn
摘要:
为提高分布式驱动电动汽车的操纵稳定性,提出一种基于相平面法的行驶稳定性控制策略。首先,建立非线性车辆2自由度模型,获得不同路面附着系数下车辆质心侧偏角相平面稳定域边界模型。其次,基于质心侧偏角相平面设计分区域控制器,当车辆处于稳定域内时,采用模糊神经网络控制器来决策横摆力矩,使车辆跟随目标变量;当车辆处于稳定域外时,设计失稳度和模糊神经网络联合控制器决策总横摆力矩,使车辆恢复稳定。最后,基于Simulink和CarSim仿真平台在蛇行绕桩和双移线工况下对稳定性控制方法进行仿真,并进行实车测试验证,结果证明了本文中所提控制策略的可行性和有效性。
钟龙飞,彭育辉,江铭. 基于相平面的分布式驱动电动汽车稳定性控制[J]. 汽车工程, 2021, 43(5): 721-729.
Longfei Zhong,Yuhui Peng,Ming Jiang. Stability Control of Distributed Driven Electric Vehicle Based on Phase Plane[J]. Automotive Engineering, 2021, 43(5): 721-729.
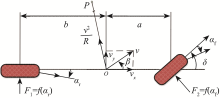
图 1
2自由度车辆模型"
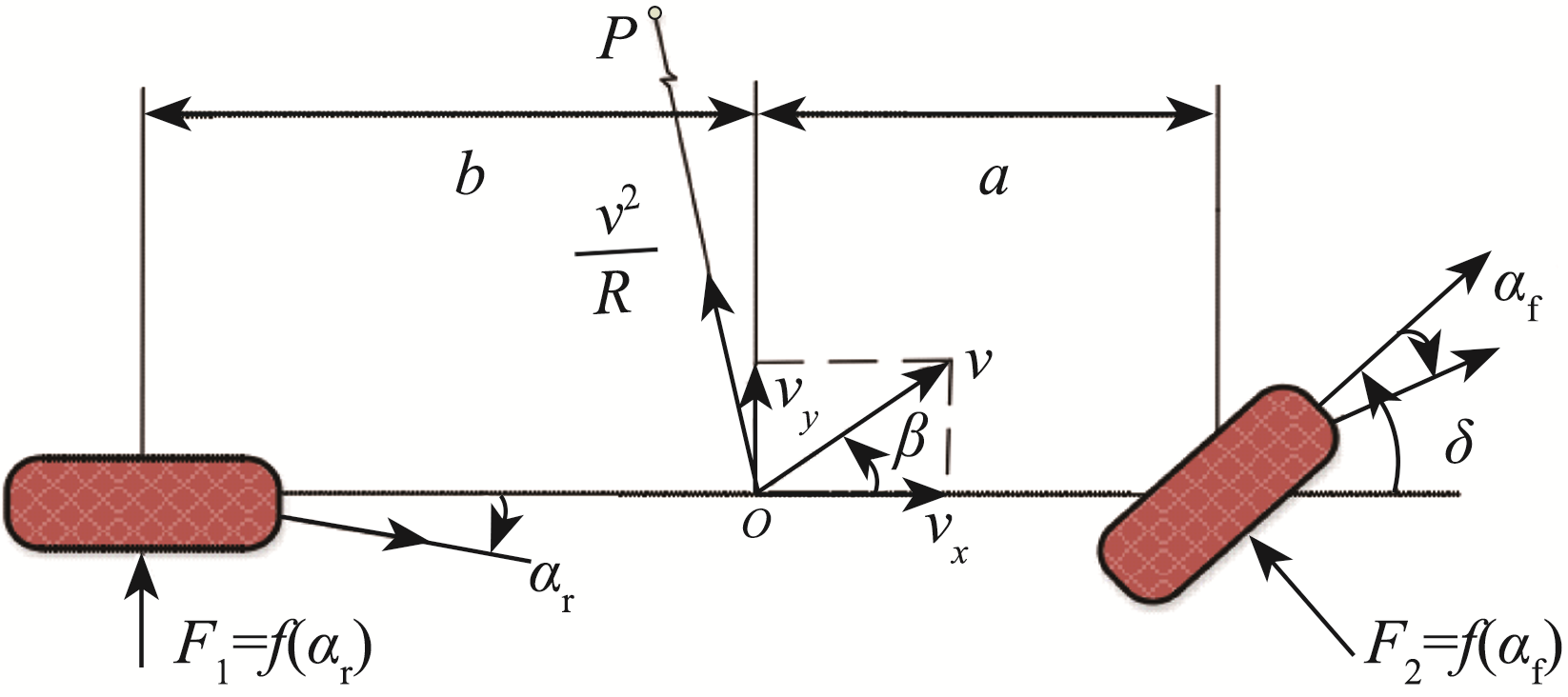
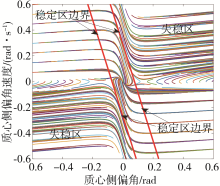
图 2
β-β?相平面图"

表 1
不同路面附着系数β-β?相平面稳定边界参数"
| 路面附着系数μ | c | k |
|---|---|---|
| 0.3 | 0.09 | -1.69 |
| 0.4 | 0.11 | -2.02 |
| 0.5 | 0.14 | -2.37 |
| 0.6 | 0.16 | -2.86 |
| 0.7 | 0.19 | -2.89 |
| 0.8 | 0.21 | -3.04 |
| 0.9 | 0.24 | -3.35 |
| 1.0 | 0.28 | -3.78 |
图 3
车辆稳定性控制器结构图"
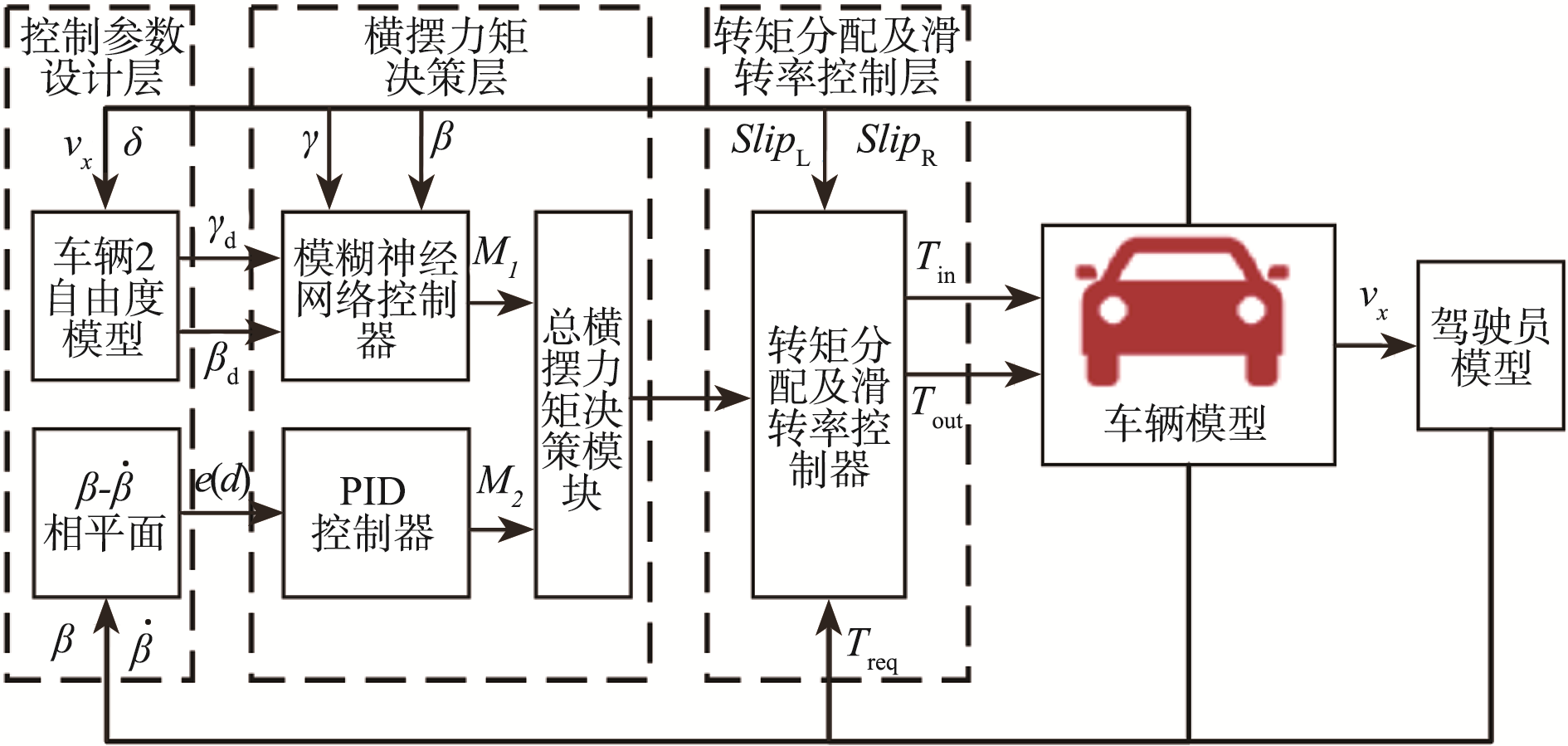
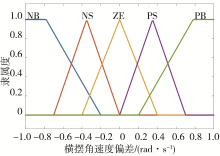
图 4
横摆角速度隶属度"
图 5
质心侧偏角隶属度"
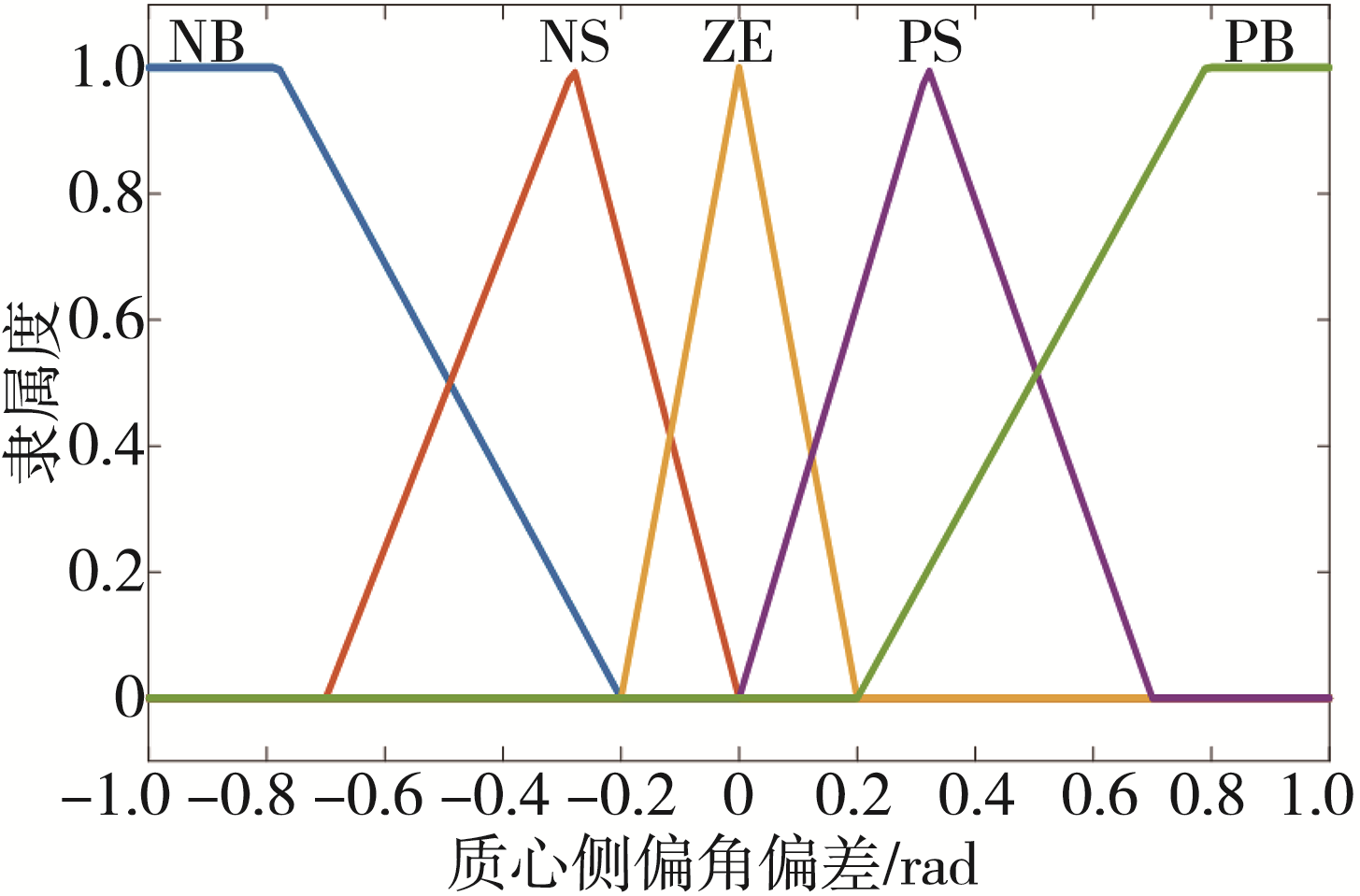
图 6
模糊规则库"

图 7
β-β?相平面控制域划分"
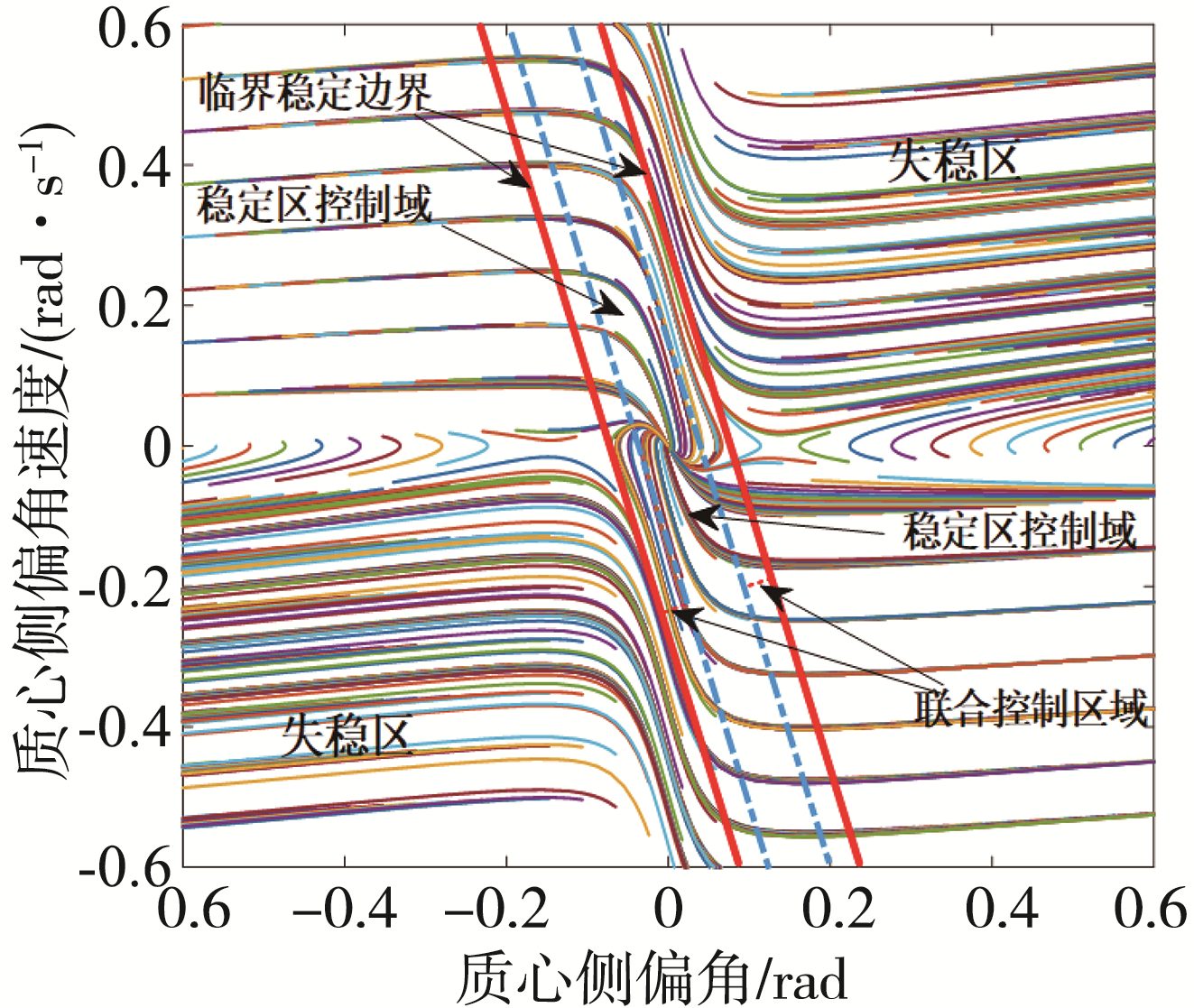
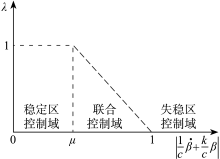
图 8
权重系数λ与相平面控制域关系"
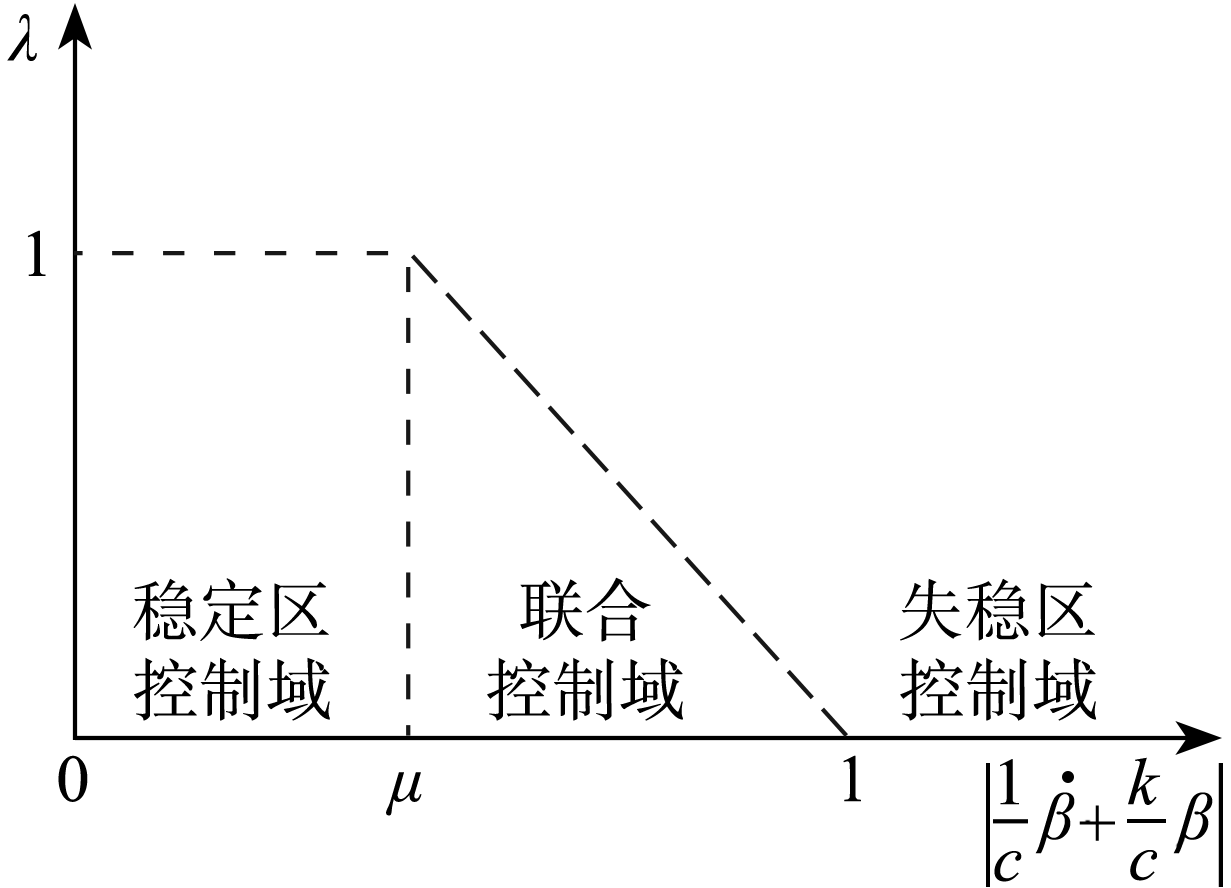
表 2
分布式驱动试验车参数"
| 参数名称 | 数值 | 参数名称 | 数值 |
|---|---|---|---|
| 整车质量 | 286 | 转动惯量 | 203 |
| 前后轴距 | 1.58 | 质心至前轴距离 | 0.805 |
| 轮距 | 1.20 | 质心至后轴距离 | 0.775 |
| 质心高度 | 0.30 | 前轮侧偏刚度 | -25 600 |
| 轮胎半径 | 0.23 | 后轮侧偏刚度 | -20 700 |
| 最高电压 | 403.2 | 电机峰值转矩 | 140 |
图 9
车辆质心行驶轨迹图"
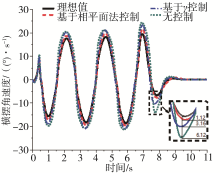
图 10
横摆角速度响应图(仿真)"

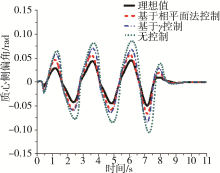
图 11
质心侧偏角响应图(仿真)"
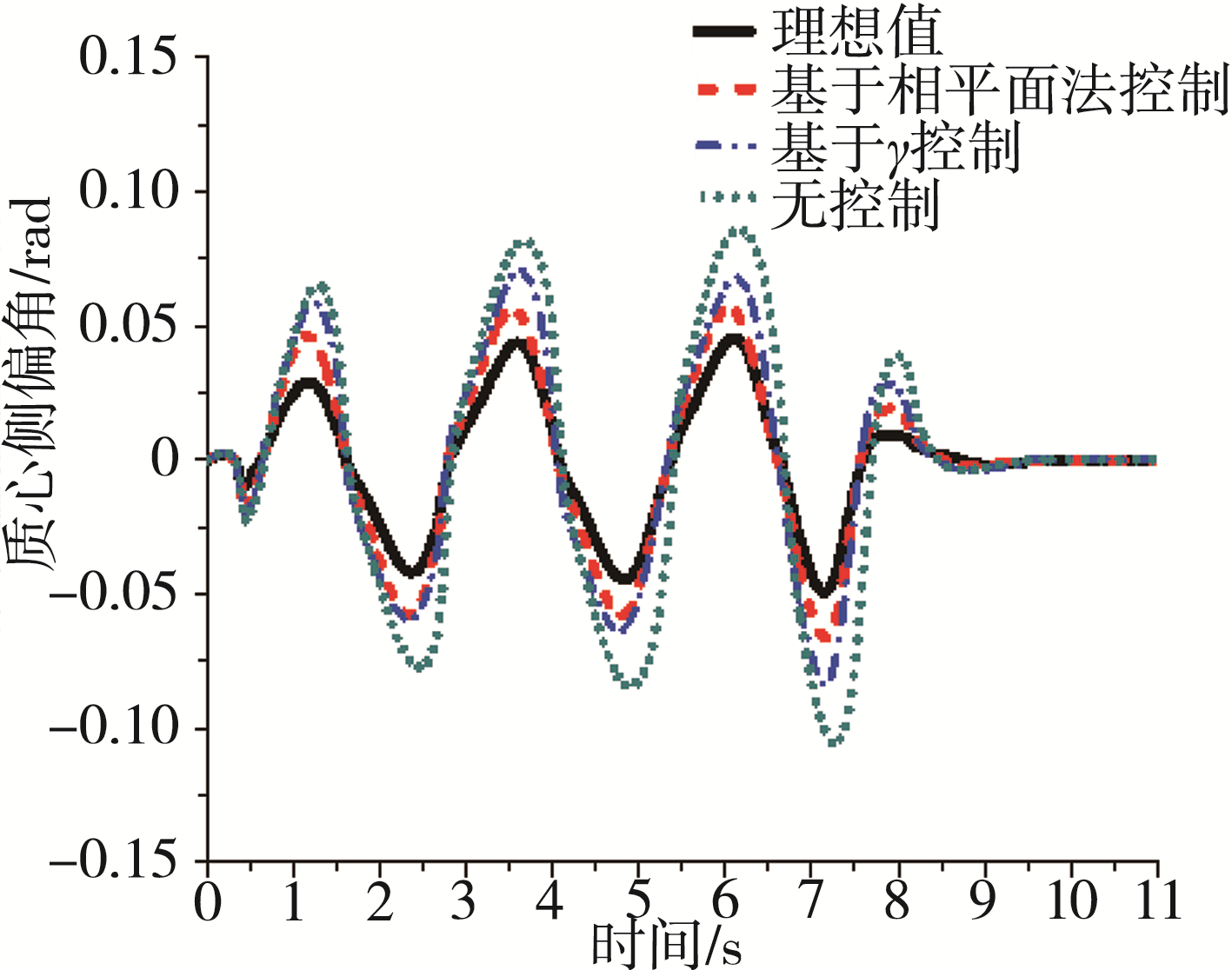
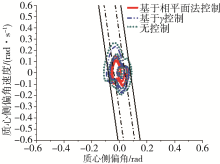
图 12
β-β?相平面图(仿真)"
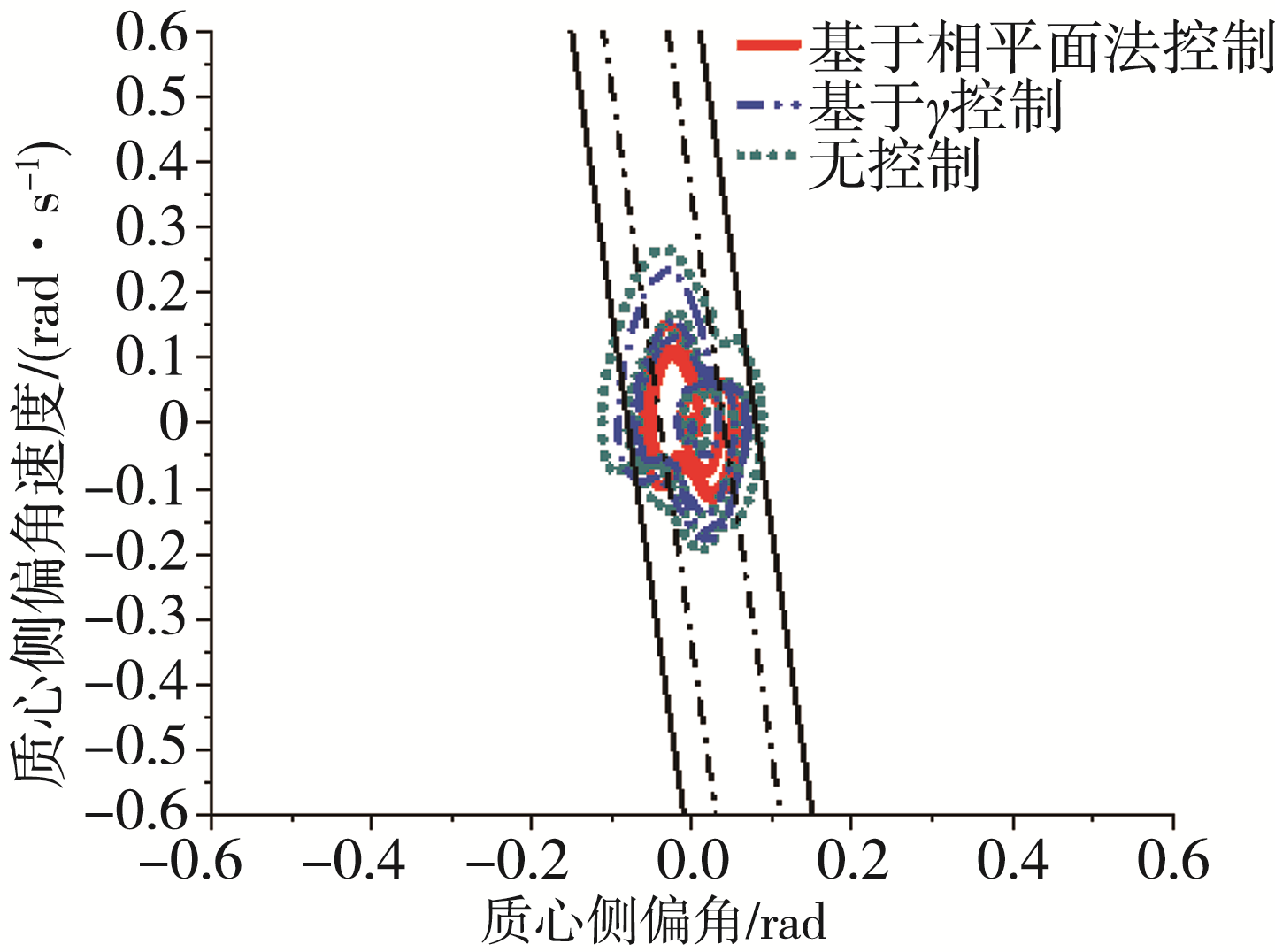
表 3
蛇形工况仿真结果统计表"
| 参数 | 相平面法 | γ控制 | 无控制 |
|---|---|---|---|
| 最大纵向位移/m | 2.51 | 4.59 | 6.13 |
| 最大侧向位移/m | 0.10 | 0.18 | 0.27 |
| 最大横摆角速度偏差/((°)·s-1) | 1.12 | 3.16 | 6.12 |
| 最大质心侧偏角/rad | 0.068 | 0.084 | 0.105 |
| 相平面失稳度/rad | 0 | 0.023 | 0.074 |

图 13
实车测试场景图"

图 14
横摆角速度响应图(试验)"
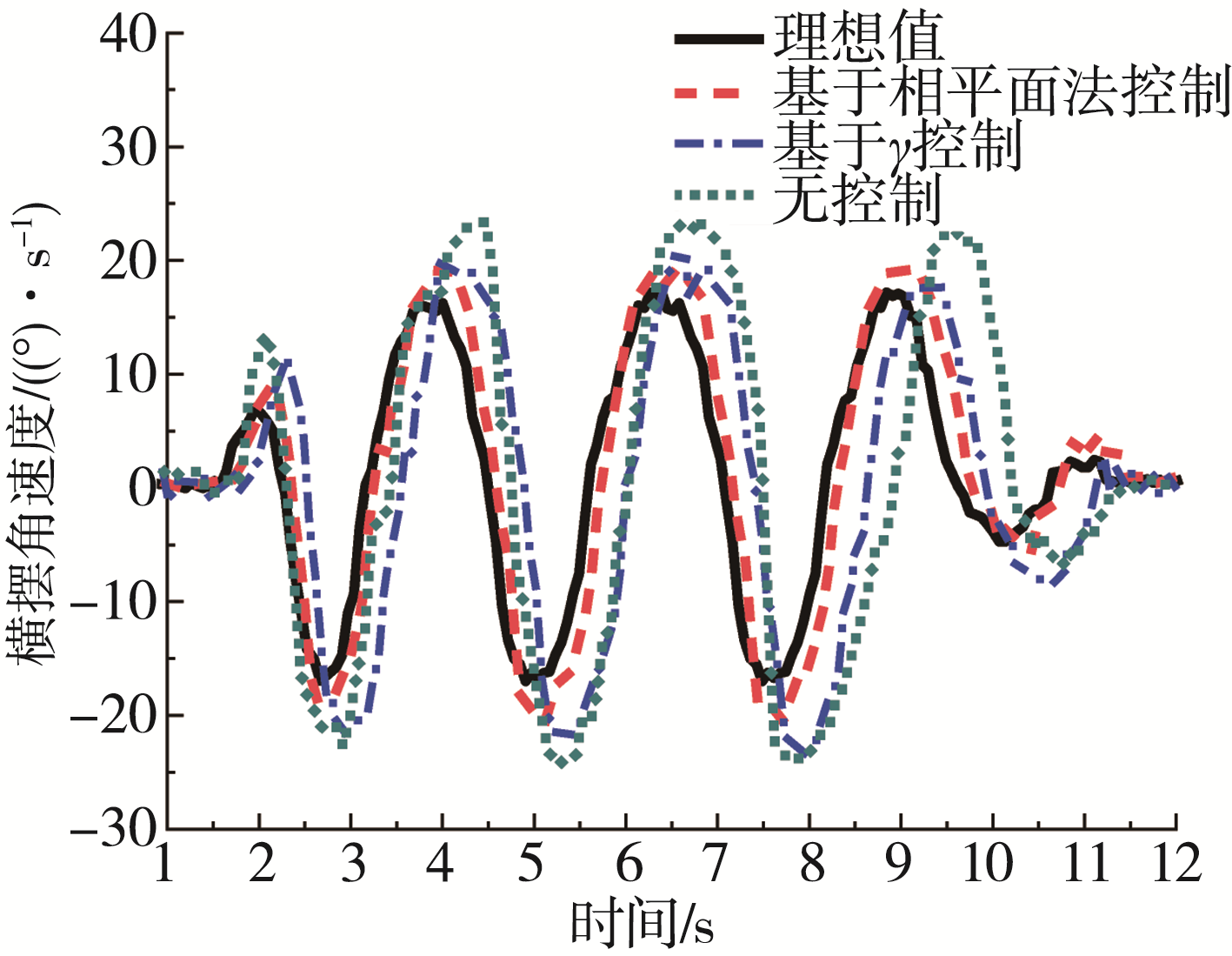
图 15
质心侧偏角响应图(试验)"
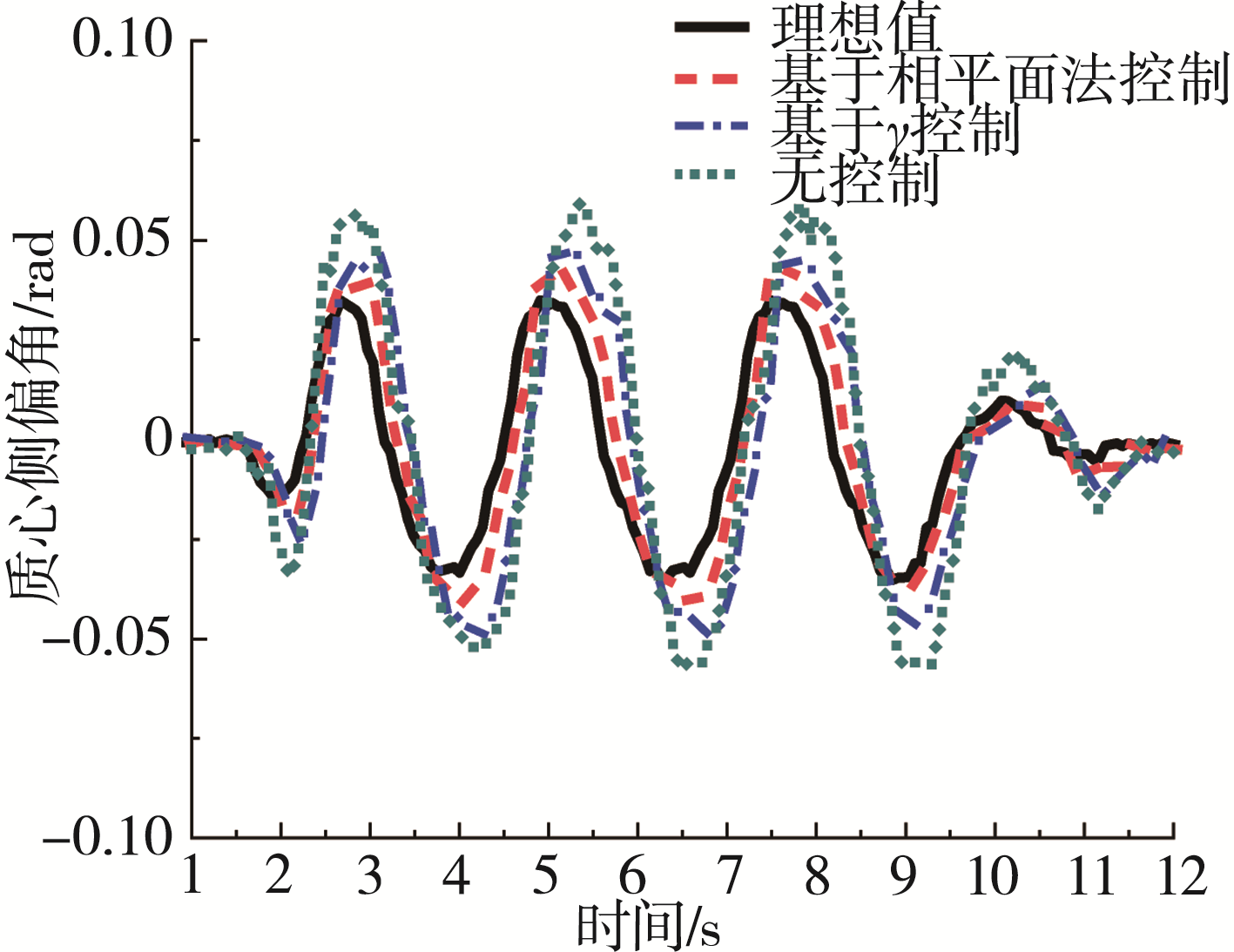
图 16
β-β?相平面图(试验)"
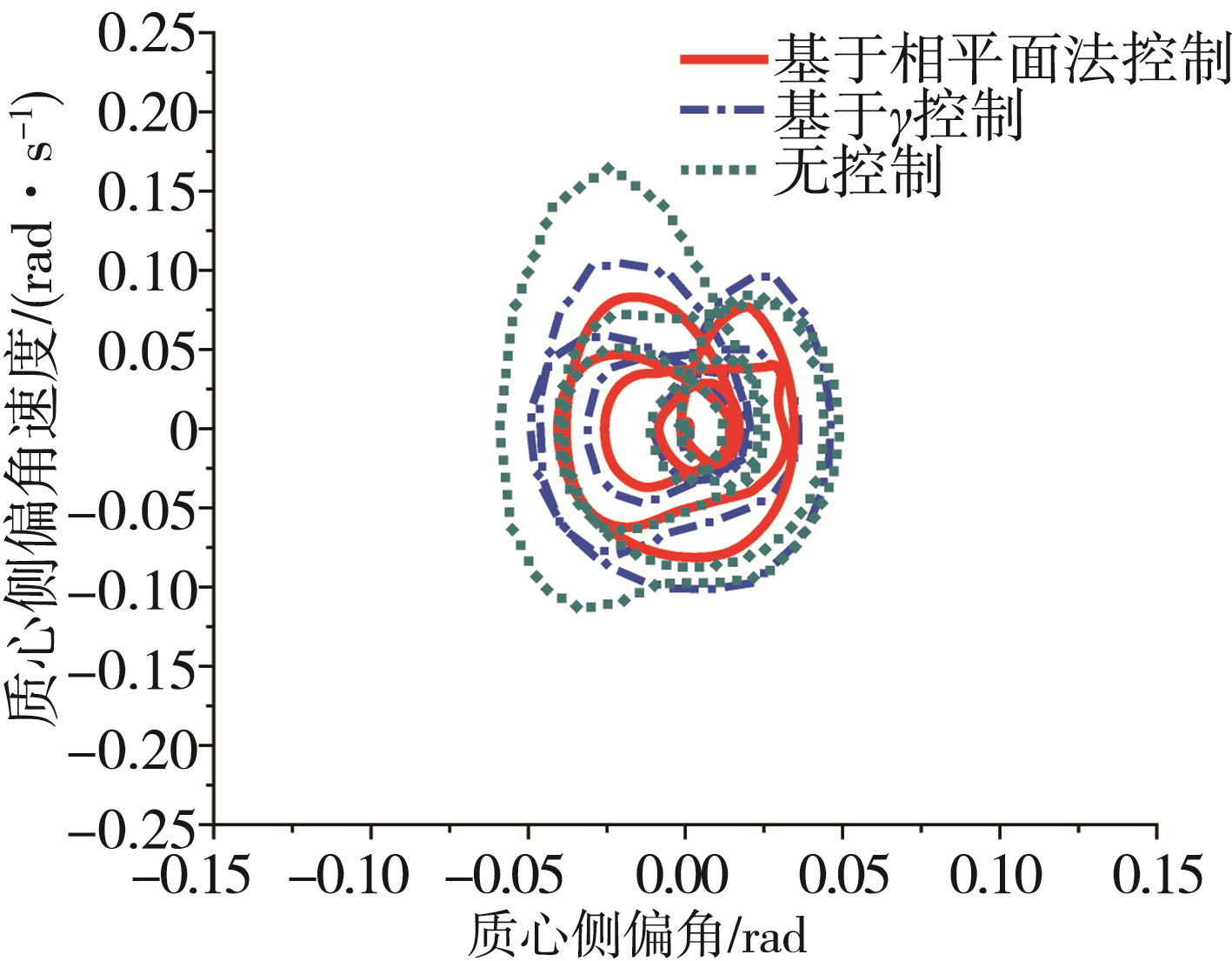
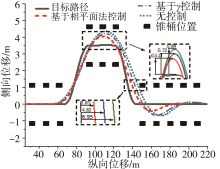
图 17
车辆质心行驶轨迹图"
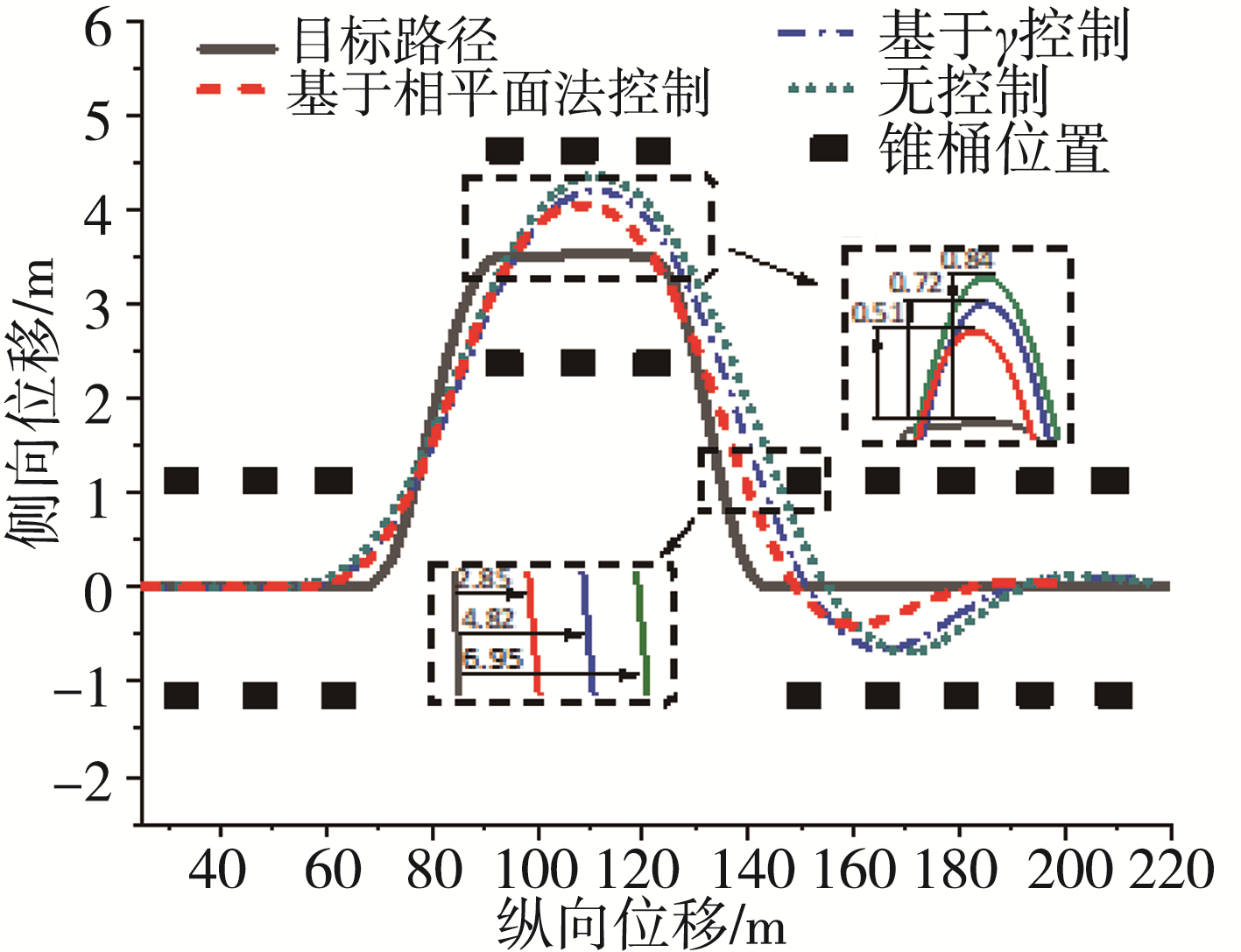
图 18
横摆角速度响应图(仿真)"
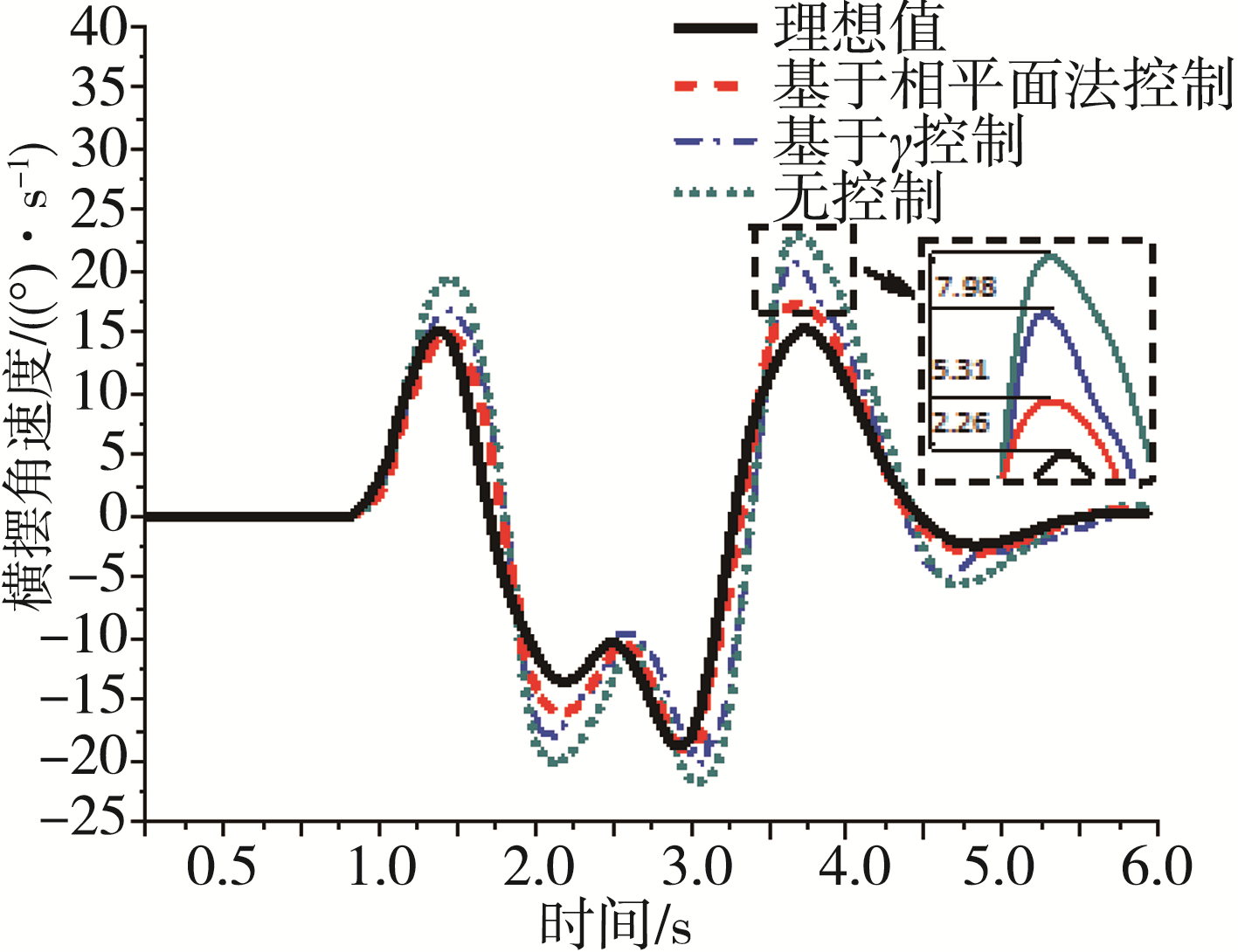
图 19
质心侧偏角响应图(仿真)"
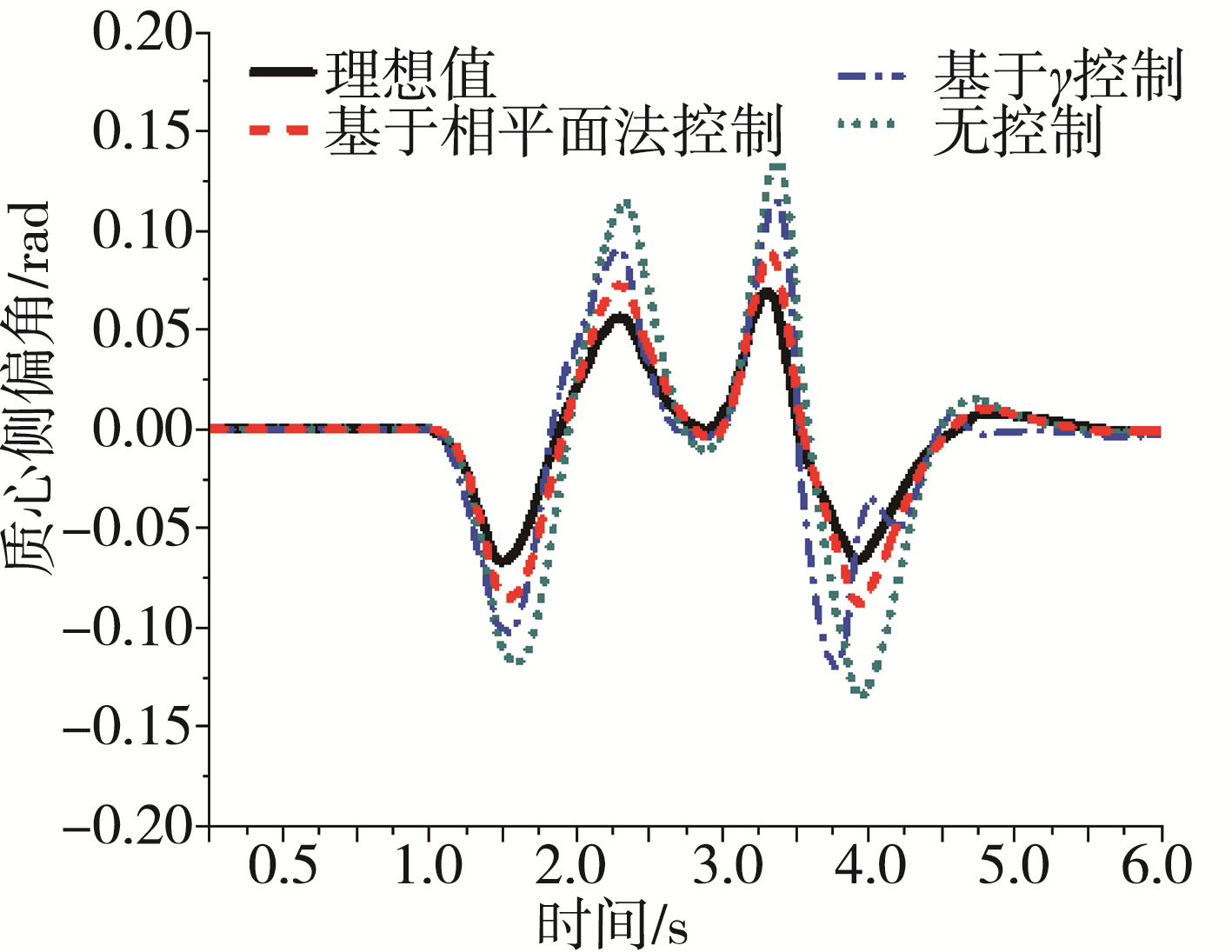
图 20
β-β?相平面图(仿真)"
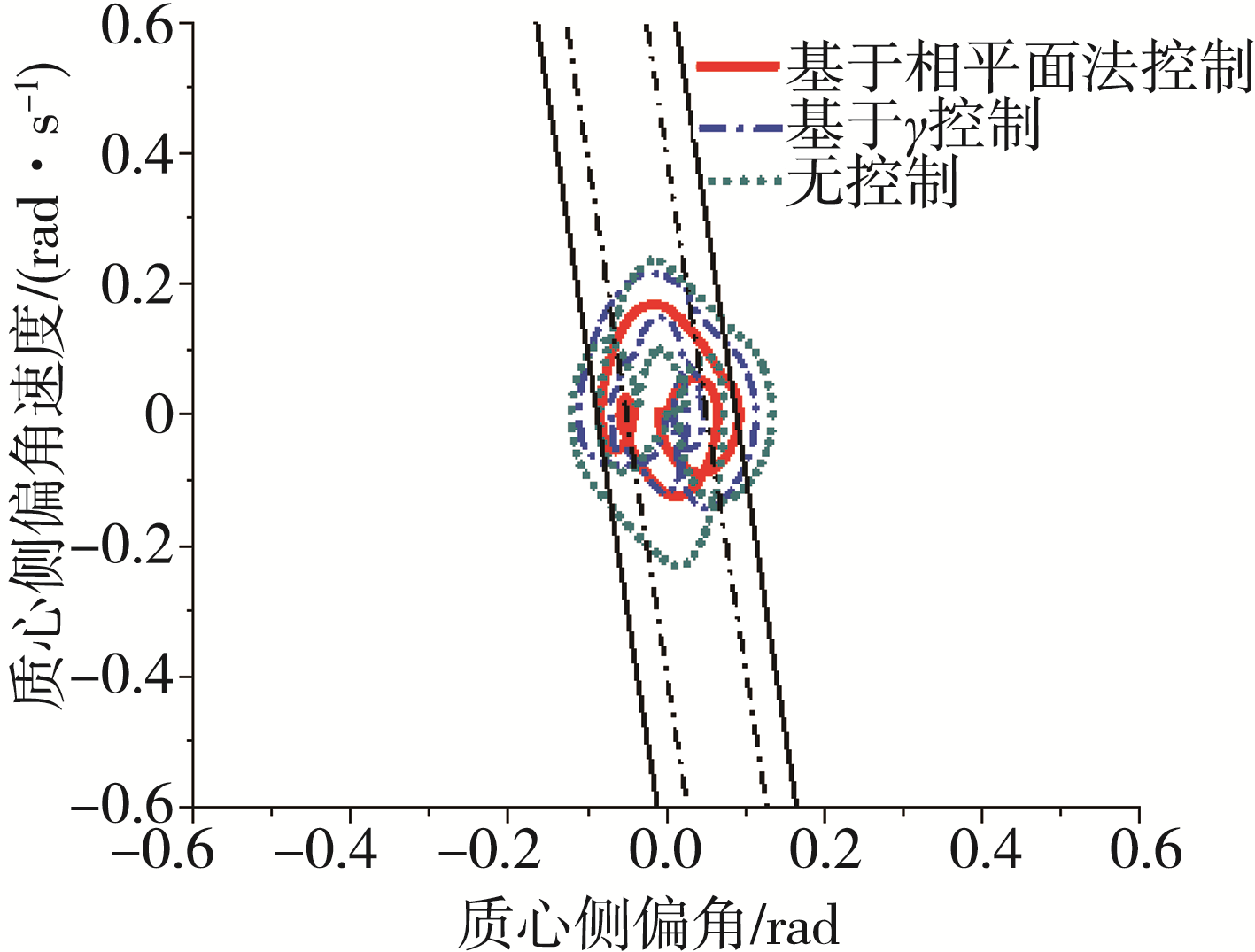
表 4
双移线工况仿真结果统计表"
| 参数 | 相平面法 | γ控制 | 无控制 |
|---|---|---|---|
| 最大纵向位移/m | 2.85 | 4.82 | 6.95 |
| 最大侧向位移/m | 0.51 | 0.72 | 0.84 |
| 最大横摆角速度偏差/((°)·s-1) | 2.26 | 5.31 | 7.98 |
| 最大质心侧偏角/rad | 0.087 | 0.120 | 0.140 |
| 相平面失稳度 | 0.011 | 0.030 | 0.050 |
图 21
横摆角速度响应图(试验)"
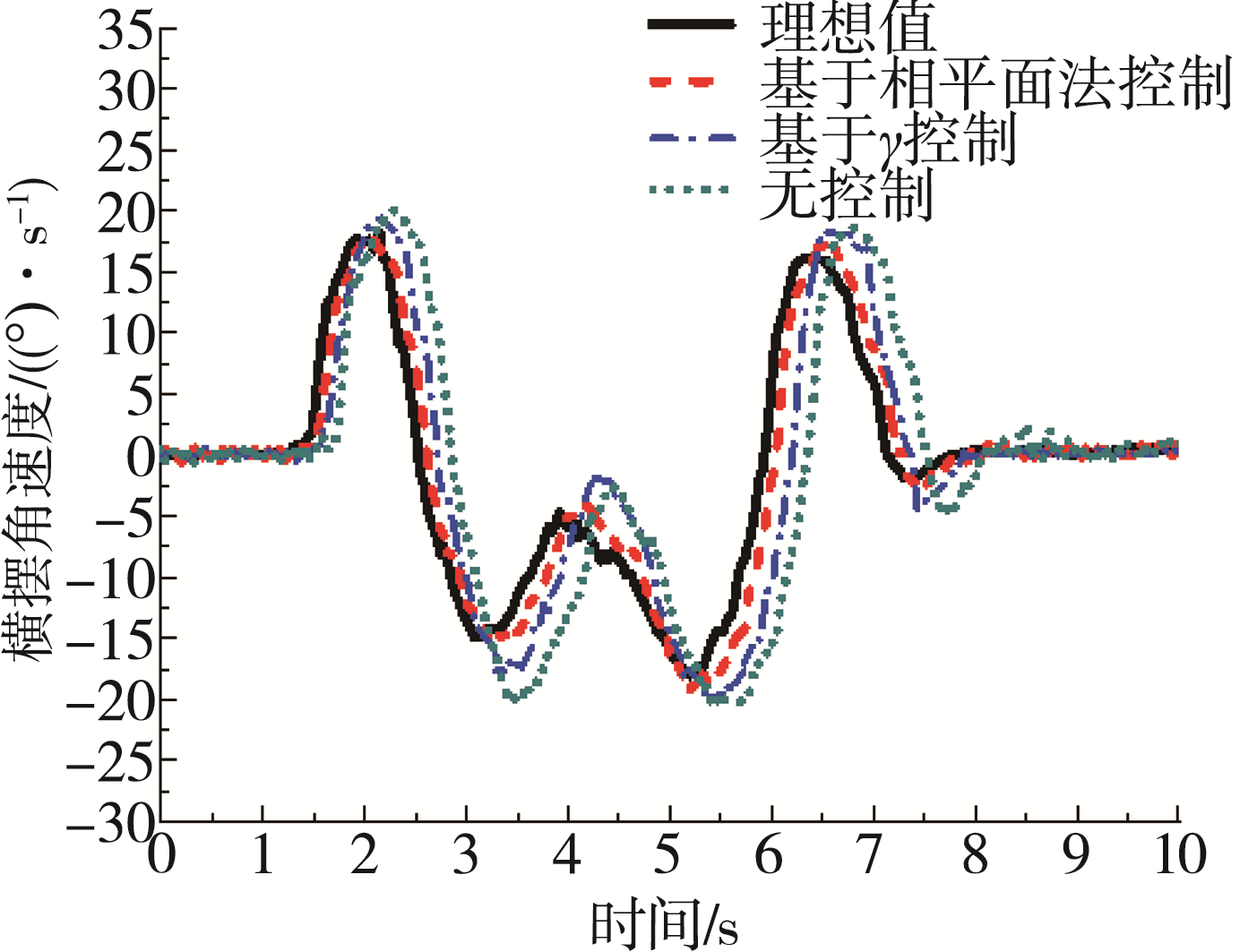
图 22
质心侧偏角响应图(试验)"
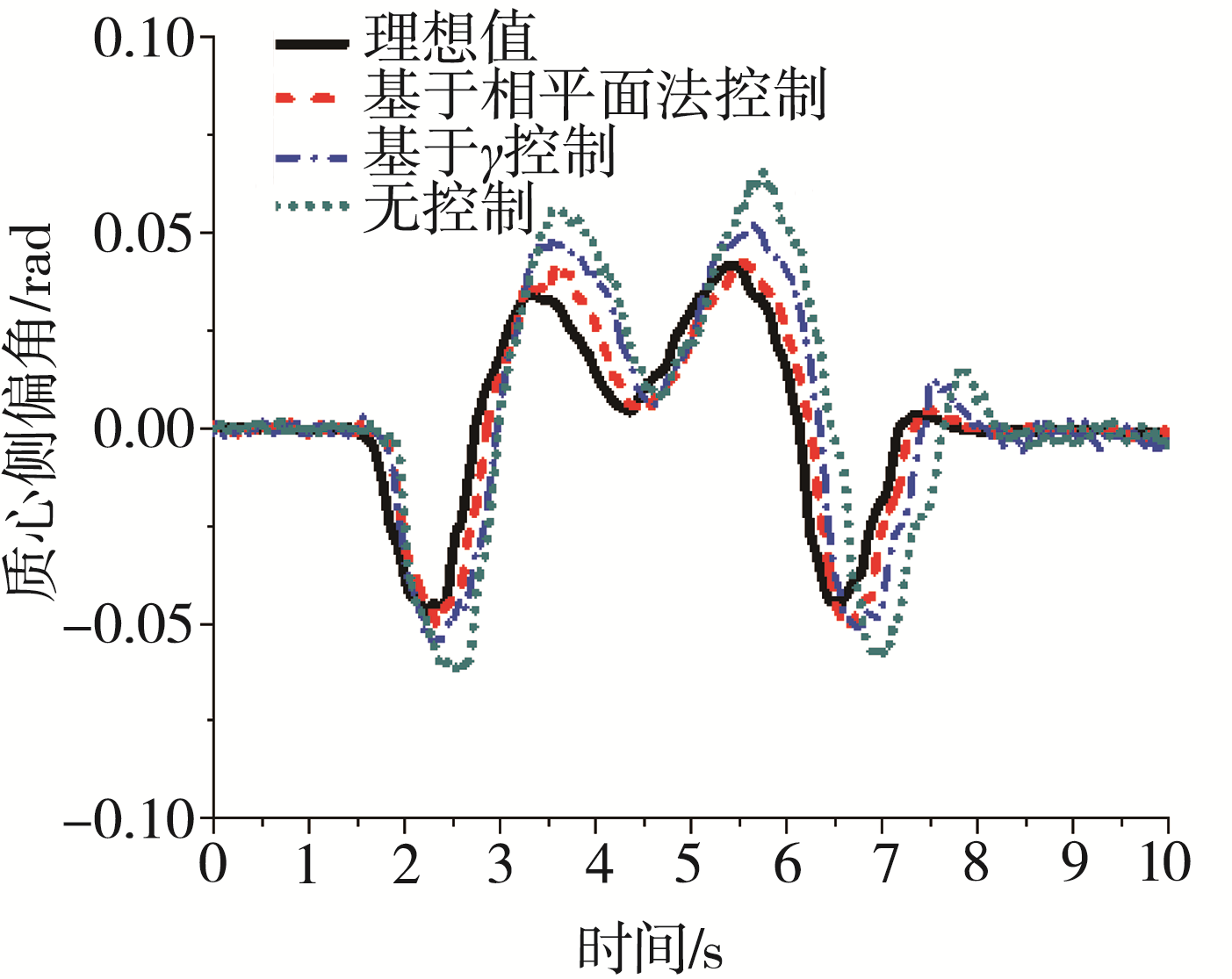
图 23
β-β?相平面图(试验)"

| 1 | VIGNATI M, SABBIONI E, TARSITANO D, et al. Electric powertrain layouts analysis for controlling vehicle lateral dynamics with torque vectoring [C]. Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, 2017. |
| 2 | BOBIER⁃TIU C, BEAL C, KEGELMAN J, et al. Vehicle control synthesis using phase portraits of planar dynamics [J]. Vehicle System Dynamics, 2019, 57(9): 1318-1337. |
| 3 | SACHS H K, SINGH M. Automobile stability⁃a study of the domain of attraction [J]. Vehicle System Dynamics, 2007, 6(2-3): 169-177. |
| 4 | INAGAKI S, KUSHIRO I, YAMAMOTO M. Analysis on vehicle stability in critical cornering using phase⁃plane method [J]. JSAE Review, 1995, 16(2): 287-292. |
| 5 | FARRONI F, RUSSO M, RUSSO R, et al. A combined use of phase plane and handling diagram method to study the influence of tyre and vehicle characteristics on stability [J]. Vehicle System Dynamics, 2013, 51(8): 1265-1285. |
| 6 | VIGNATI M, SABBIONI E, CHELI F. A torque vectoring control for enhancing vehicle performance in drifting [J]. Electronics, 2018, 7(12):394. |
| 7 | 柳江, 王政皓, 张业. 车辆主动转向和独立驱动集成控制[J]. 控制理论与应用, 2019, 36(8): 1351-1359. |
| LIU J, WANG Z H, ZHANG Y. Active steering and independent drive integrated control [J]. Control Theory & Applications, 2019, 36(8): 1351-1359. | |
| 8 | LIANG X T, CHEN W W, HU Y P, et al. Study on coordinated control strategy of electric vehicle AFS and DYC based on phase plane method [C]. INTER⁃NOISE and NOISE⁃CON Congress and Conference Proceedings, 2019. |
| 9 | 刘志强, 刘广. 分布式驱动电动汽车稳定性控制仿真与试验[J]. 汽车工程, 2019, 41(7):792-799. |
| LIU Z Q, LIU G. Simulation and test of stability control for distributed drive electric vehicles [J]. Automotive Engineering, 2019,41(7): 792-799. | |
| 10 | 刘学成, 刘俊, 李汉杰. 基于相平面法的车辆直接横摆力矩控制研究[J]. 合肥工业大学学报(自然科学版), 2019, 42(11): 1455-1461. |
| LIU X C, LIU J, LI H J. Research on direct yaw moment control of vehicle based on phase plane method [J]. Journal of Hefei University of Technology (Natural Science), 2019, 42(11): 1455-1461. | |
| 11 | VELENIS E, KATZOURAKIS D, FRAZZOLI E. Steady⁃state drif⁃ting stabilization of RWD vehicles [J]. Control Engineering Practice, 2011, 19(11): 1363-1376. |
| 12 | 王亚琴, 田杰, 蔡隆玉. 基于相平面的车辆稳定性DYC控制[J]. 制造业自动化, 2014, 36(12): 38-40. |
| WANG Y Q, TIAN J, CAI L Y. Direct yaw control of vehiclestability based on the phase plane theory [J]. Manufacturing Automation, 2014, 36(12): 38-40. | |
| 13 | ALAGAPPAN A V, RAO K V N, KUMAR R K. A comparison of various algorithms to extract magic formula tire model coefficients for vehicle dynamics simulations [J]. Vehicle System Dynamics, 2015, 53(2): 154-178. |
| 14 | 李绍松, 郭孔辉, 仇韬. 极限工况下主动前轮转向汽车稳定性控制[J]. 汽车工程, 2020, 42(2): 191-198. |
| LI S S, GUO K H, QIU T. Stability control of vehicle with active front steering under extreme conditions [J]. Automotive Engineering, 2020, 42(2): 191-198. | |
| 15 | 高月磊. 基于相平面稳定域边界的轻型车稳定性控制研究[D]. 长春: 吉林大学, 2013. |
| GAO Y L. Stability control study based on the stability boundary of phase plane for light vehicle [D]. Changchun: Jilin University, 2013. | |
| 16 | 阳贵兵, 廖自力, 刘春光. 基于β-β相平面法的电传动车辆稳定性控制方法[J]. 装甲兵工程学院学报, 2016, 30(3): 59-63. |
| YANG G B, LIAO Z L, LIU C G. Stability control method of electric drive vehicle based on β-β phase plane method [J]. Journal of Academy of Armored Force Engineering, 2016, 30(3): 59-63. | |
| 17 | 龚天洋, 谢宪毅. 基于相平面法的车辆电子稳定控制策略研究[J].交通信息与安全, 2019, 37(2): 83-90. |
| GONG T X, XIE X Y. A control strategy of vehicle electronic stability based on phase plane method [J]. Journal of Transport Information and Safety, 2019, 37(2): 83-90. | |
| 18 | 王立标, 李军, 范剑. 车辆横向稳定性自适应神经网络控制策略研究[J]. 汽车工程, 2010, 32(6): 493-496. |
| WANG L B, LI J, FAN J. A study on the control strategy of adaptive neural network for vehicle yaw stability [J]. Automotive Engineering, 2010, 32(6): 493-496. | |
| 19 | 汽车操纵稳定性试验方法: [S].2014. |
| Controllability and stability test procedure for automobile: [S]. 2014. |
| [1] | 张念忠,宋强,王冠峰,王明生. 车用永磁同步电机无电流传感器控制研究[J]. 汽车工程, 2024, 46(2): 281-289. |
| [2] | 焦志鹏, 马建, 赵轩, 张凯, 孟德安, 韩琪, 张昭. 基于电动汽车制动安全检测的短时工况及方法研究[J]. 汽车工程, 2024, 46(1): 109-119. |
| [3] | 原江鑫, 何莉萍, 李耀东, 李罡. 电动汽车BMS从控板热分析及散热优化[J]. 汽车工程, 2024, 46(1): 128-138. |
| [4] | 张鹏博, 陈仁祥, 邵毅明, 孙世政, 闫凯波. 纯电动汽车电驱动系统故障诊断研究进展[J]. 汽车工程, 2024, 46(1): 61-74. |
| [5] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [6] | 梁海强,何洪文,代康伟,庞博,王鹏. 融合经验老化模型和机理模型的电动汽车锂离子电池寿命预测方法研究[J]. 汽车工程, 2023, 45(5): 825-835. |
| [7] | 周兵,魏佳宝,柴天,吴晓建,王鹤. 基于最优方法的碰后辅助驾驶控制策略[J]. 汽车工程, 2023, 45(4): 561-571. |
| [8] | 吴忠强,张长兴. 考虑配电网负荷的电动汽车分布式充电控制[J]. 汽车工程, 2023, 45(4): 598-608. |
| [9] | 吴志恒,刘爱民. 汽车永磁同步电机切换函数式混合控制策略[J]. 汽车工程, 2023, 45(4): 619-627. |
| [10] | 康宇航,李韶华,杨泽坤. 基于相空间三维动态稳定域的重型车辆稳定性控制策略研究[J]. 汽车工程, 2023, 45(4): 637-646. |
| [11] | 王军年,高守林,杨钫,管畅洋,杨志华. 多行星排转矩定向分配电驱动桥振动特性优化[J]. 汽车工程, 2023, 45(3): 421-429. |
| [12] | 朱成,刘頔,滕欣余,张国华,于丹,刘沙,胡苧丹. 新能源汽车综合经济性对比分析及预测研究[J]. 汽车工程, 2023, 45(2): 333-340. |
| [13] | 李琴,汤建明,张博远,陈勇,王勇. 分布式驱动电动汽车多执行器容错控制研究[J]. 汽车工程, 2023, 45(12): 2251-2259. |
| [14] | 于天蝉,王源,石文星,梁辰吉昱,李先庭,岑俊平,罗敏. 基于三介质换热器的电动汽车热管理系统及其性能分析[J]. 汽车工程, 2023, 45(11): 2001-2013. |
| [15] | 宋强,王冠峰,商赫,张念忠. 基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究[J]. 汽车工程, 2023, 45(11): 2104-2112. |
|