汽车工程 ›› 2022, Vol. 44 ›› Issue (6): 799-808.doi: 10.19562/j.chinasae.qcgc.2022.06.001
所属专题: 智能网联汽车技术专题-规划&控制2022年
• • 下一篇
谈东奎1,4,胡港君1,4,朱波1,4( ),金来2,张捷3
),金来2,张捷3
Dongkui Tan1,4,Gangjun Hu1,4,Bo Zhu1,4(),Lai Jin2,Jie Zhang3
摘要:
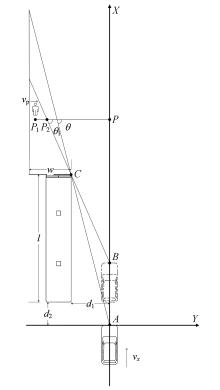
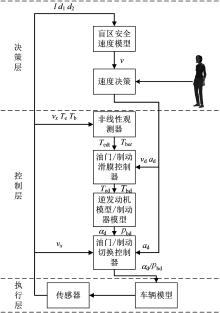
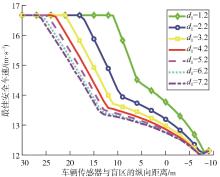
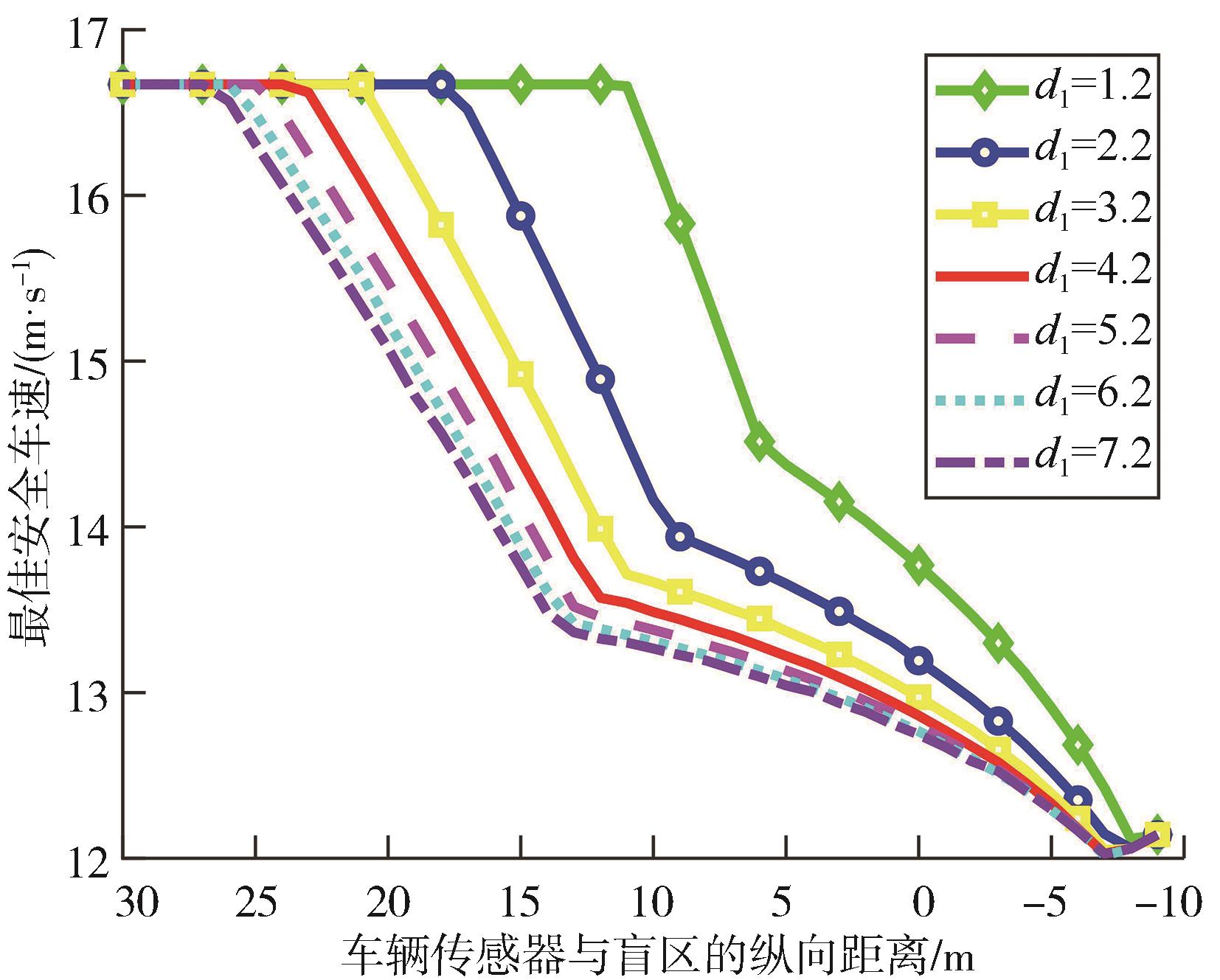
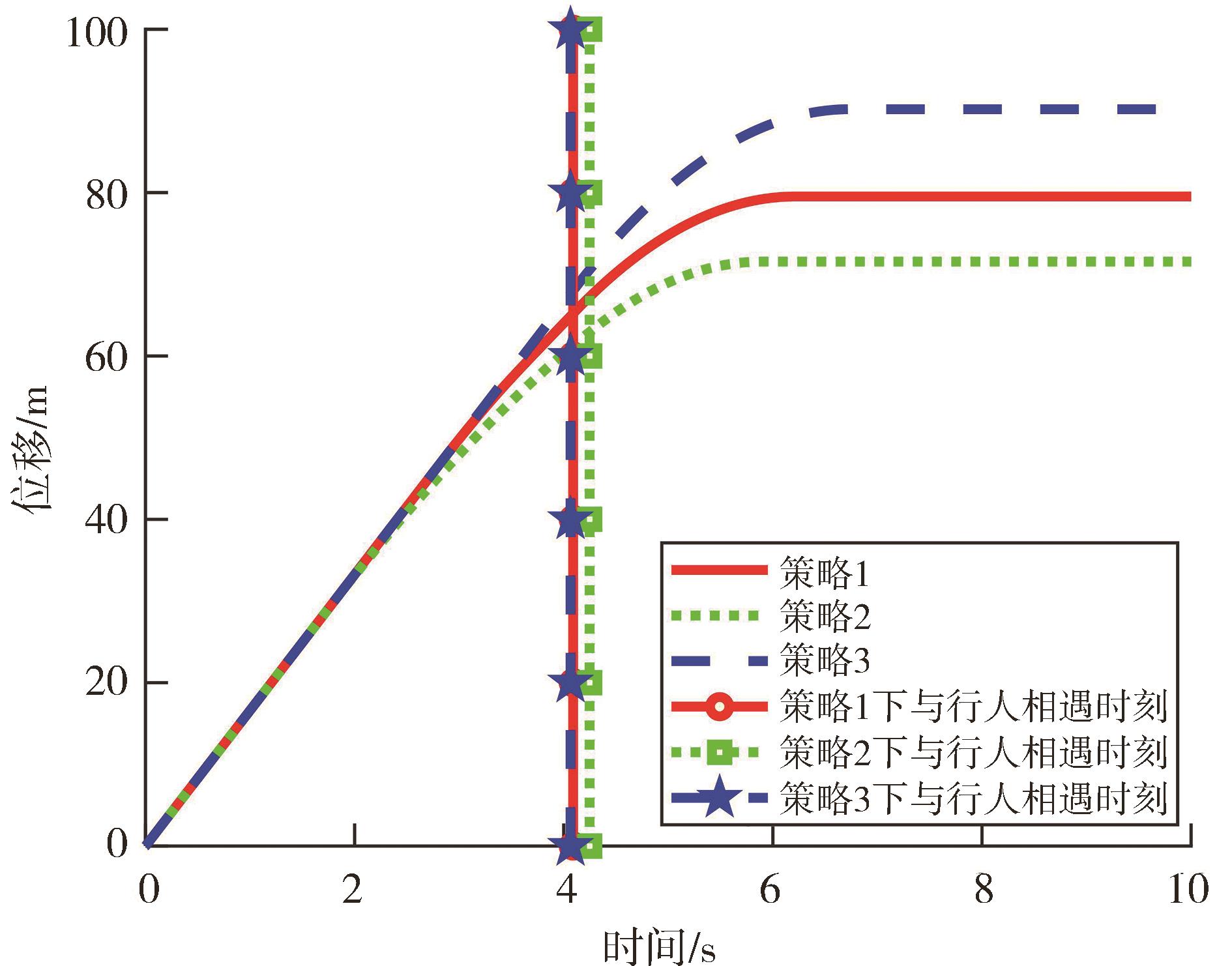
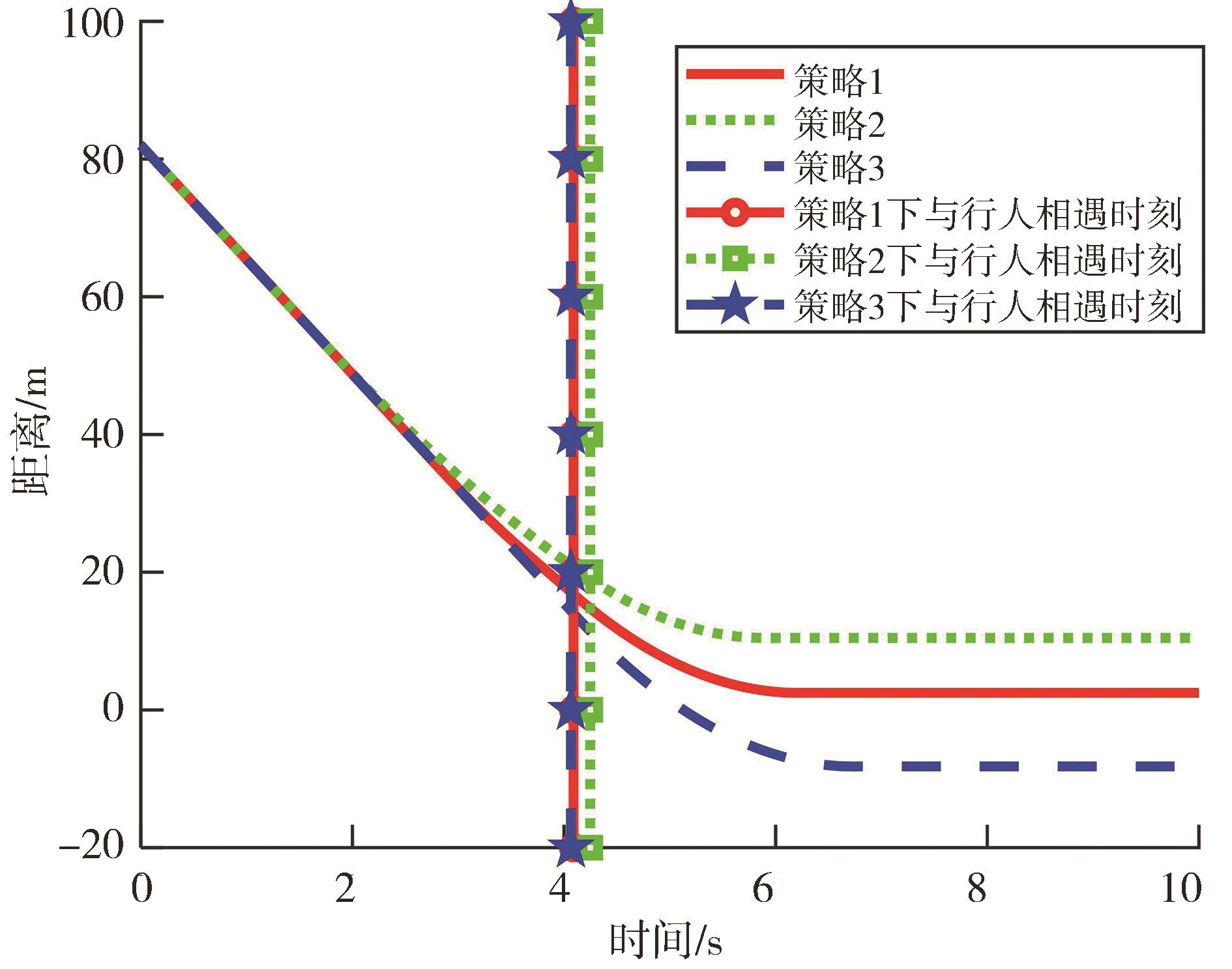
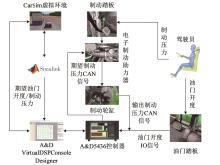
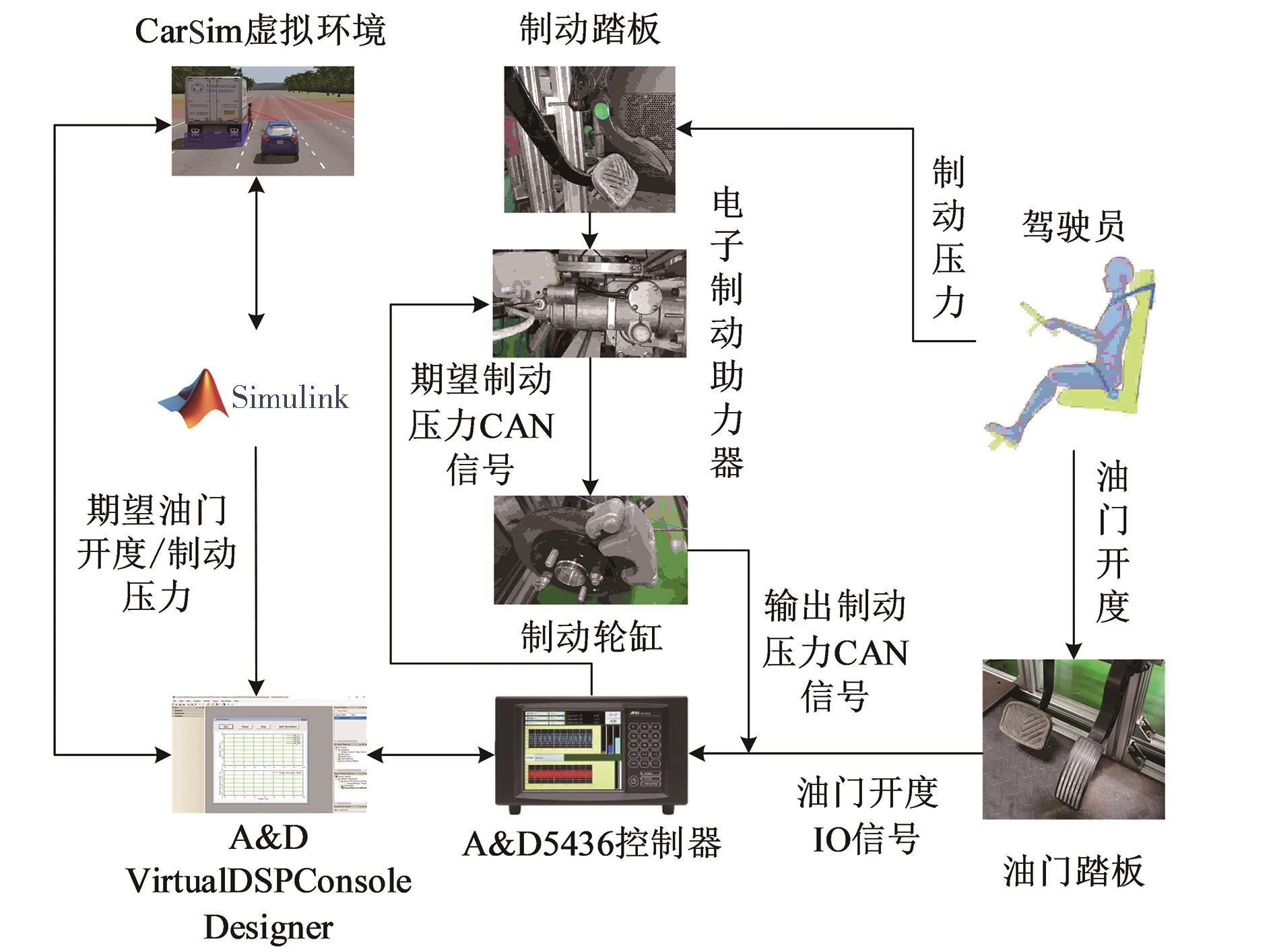
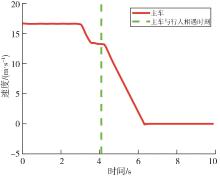
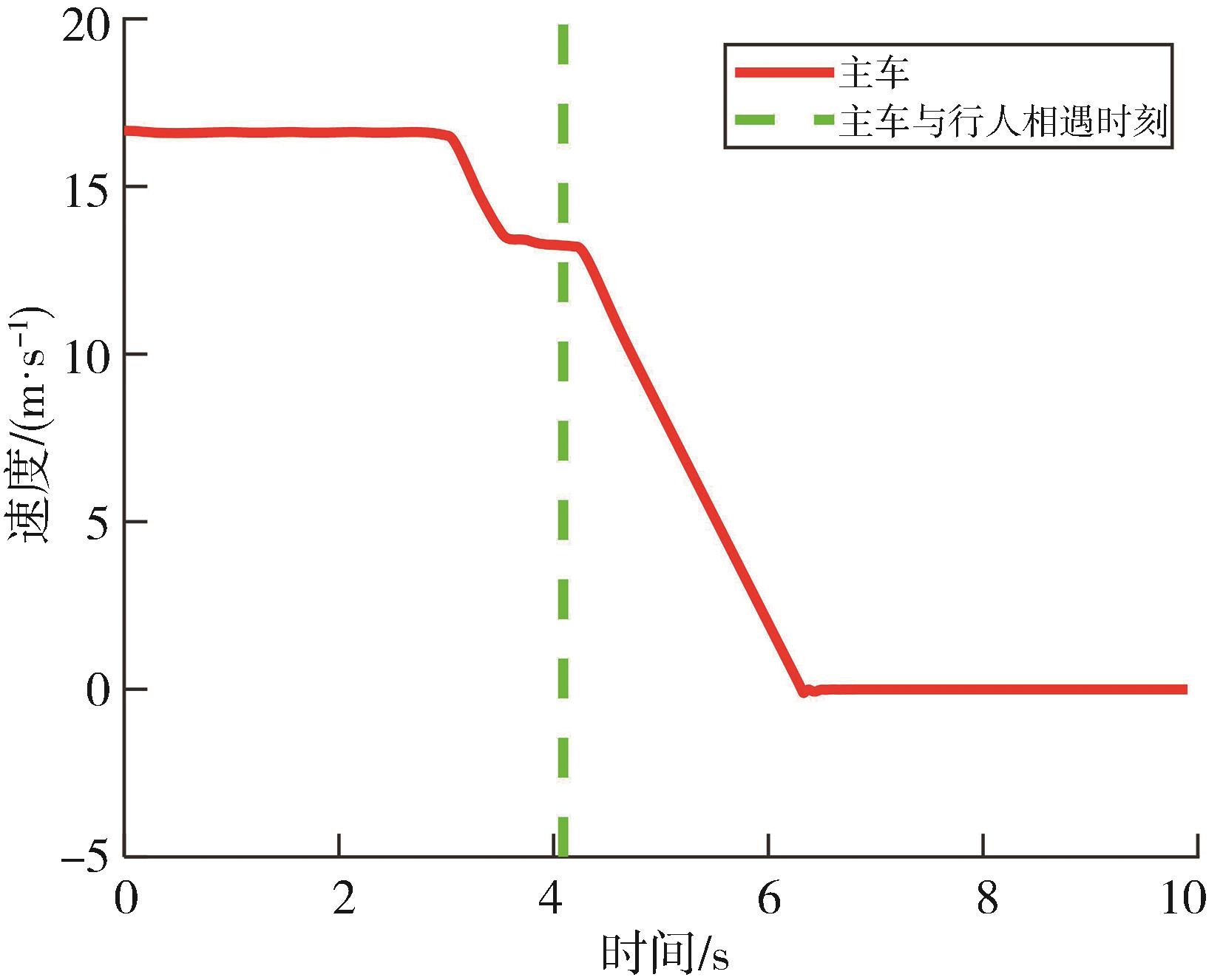
预期功能安全的提出,使得传统的自动紧急制动系统的安全性受到了挑战。为此,本文中利用基于系统理论过程分析(systems-theoretic process analysis,STPA)方法得到了自动紧急制动系统的预期功能安全要求,在传统的自动紧急制动系统基础上增加了感知盲区安全车速规划策略。然后基于盲区场景下车辆与行人相遇运动学模型,构造盲区安全车速公式。接着设计加入非线性干扰观测器的速度滑模控制器,对该速度进行跟踪控制,最后在CarSim与Simulink联合平台上开展仿真试验,比较此系统与没有增加预期功能安全要求的自动紧急制动系统的安全性,并进一步在硬件在环仿真试验台上验证。结果表明,考虑预期功能安全的自动紧急制动系统能有效降低行人碰撞风险,并确保车辆安全通过盲区的行驶效率。