汽车工程 ›› 2025, Vol. 47 ›› Issue (8): 1559-1572.doi: 10.19562/j.chinasae.qcgc.2025.08.012
• • 上一篇
陈毅,贺湘宇( ),周希亮,范厚禄,吴卓禹
),周希亮,范厚禄,吴卓禹
收稿日期:2024-10-29
修回日期:2025-01-07
出版日期:2025-08-25
发布日期:2025-08-18
通讯作者:
贺湘宇
E-mail:hexiangyu@csust.edu.cn
基金资助:
Yi Chen,Xiangyu He(),Xiliang Zhou,Houlu Fan,Zhuoyu Wu
Received:2024-10-29
Revised:2025-01-07
Online:2025-08-25
Published:2025-08-18
Contact:
Xiangyu He
E-mail:hexiangyu@csust.edu.cn
摘要:
四轴重载无人车辆是一种新型特种工程车辆,具有多轴、高承载和大转弯半径的特点,因此,全轮转向系统的研究成为一大难点。本文设计了一种新型四轴重载无人车辆的电液全轮转向系统,并开展了路径跟踪方法的研究。首先,构建了四轴重载无人车辆2自由度模型(2-DOF),基于转向阻力和车桥结构的分析,设计了一种新型电液全轮转向系统;然后,提出了一种基于预瞄控制的滑模控制器(PSMC)的路径跟踪方法,实现了对车辆四轴转角的精确控制;最后,基于不同工况,利用联合仿真模型对本文研究内容进行了验证。为验证电液转向系统的稳定性和可行性,搭建了实验平台,展现了该系统良好的动态性能。
陈毅,贺湘宇,周希亮,范厚禄,吴卓禹. 四轴重载无人车辆电液全轮转向系统设计与路径跟踪方法研究[J]. 汽车工程, 2025, 47(8): 1559-1572.
Yi Chen,Xiangyu He,Xiliang Zhou,Houlu Fan,Zhuoyu Wu. Design and Path Tracking Method of Electrohydraulic All-Wheel Steering Systems for Four-Axle Heavy-Duty Unmanned Vehicles[J]. Automotive Engineering, 2025, 47(8): 1559-1572.
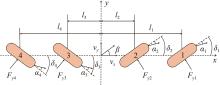
图1
四轴重载无人车辆2-DOF"
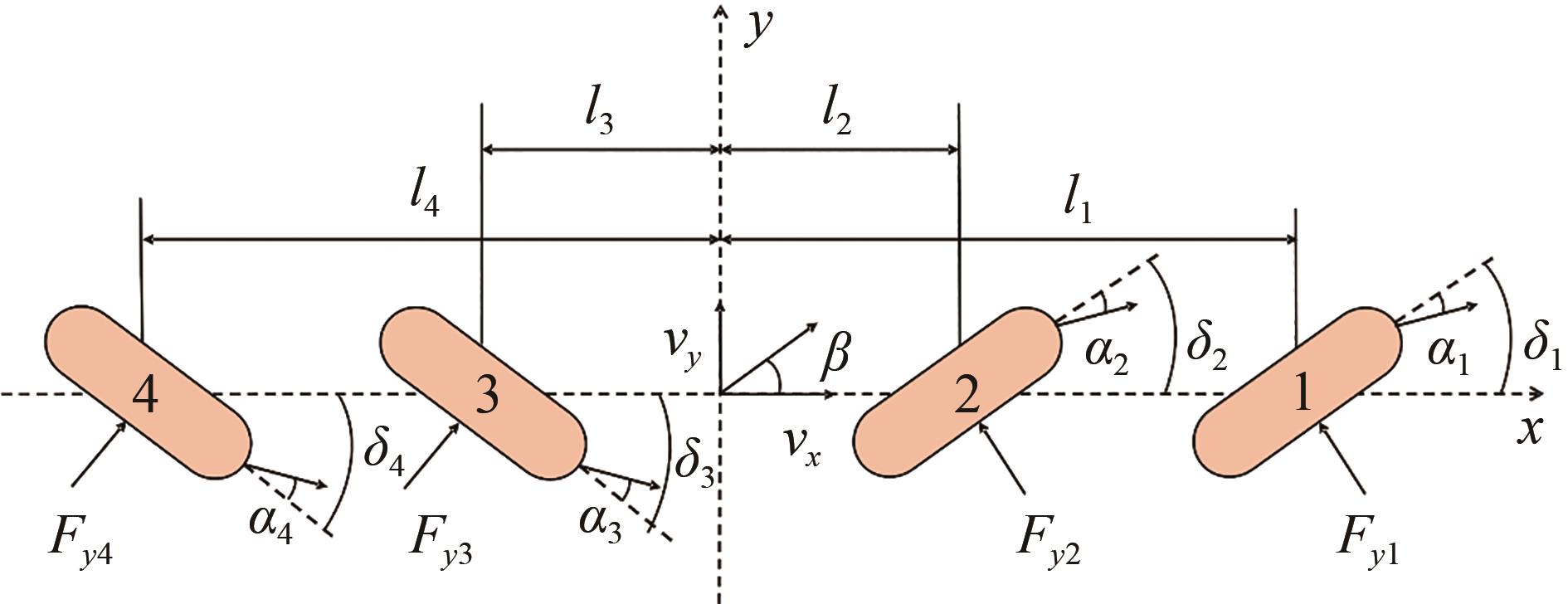
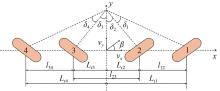
图2
四轴重载无人车辆阿克曼法则原理图"
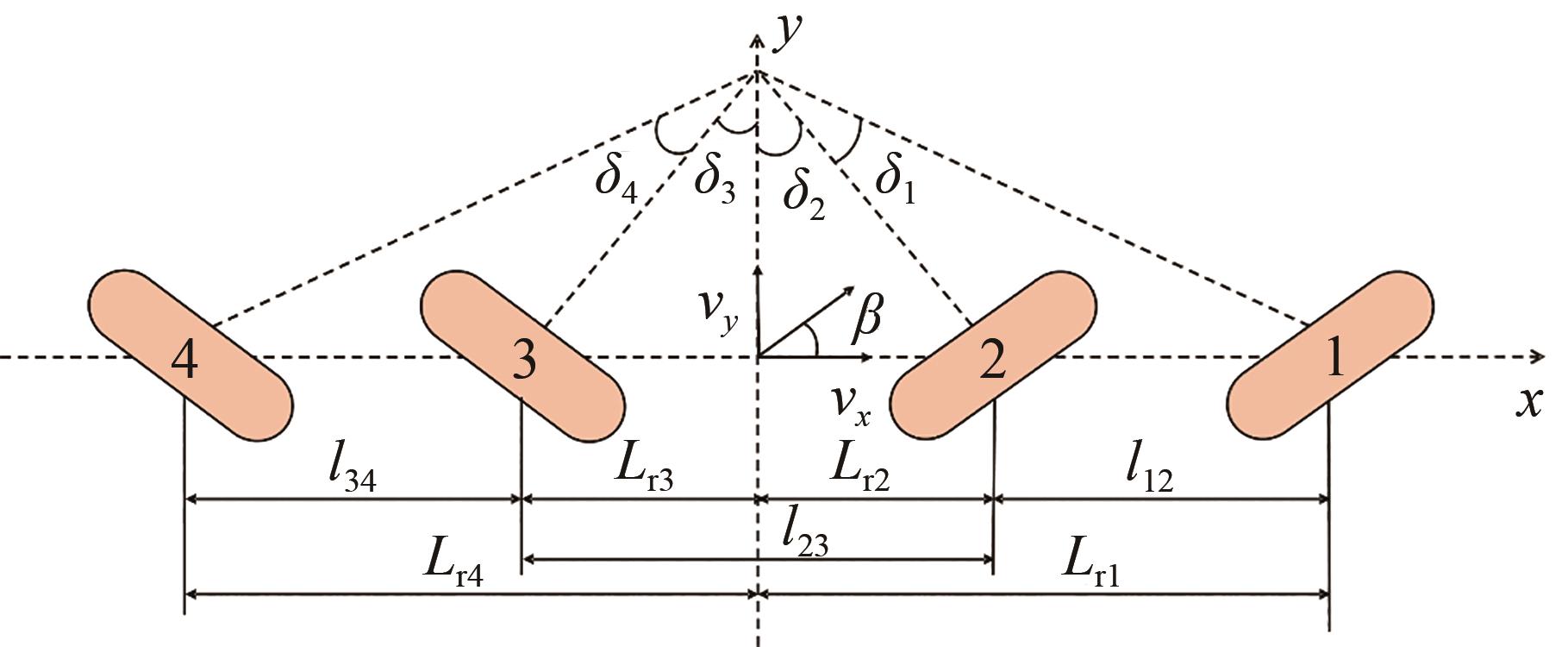
表1
整车参数及仿真条件"
| 参数符号 | 参数名称 | 数值 | 单位 |
|---|---|---|---|
| 整机质量 | 20 560 | ||
| 轮胎宽度 | 375 | ||
| 轮胎滚动半径 | 510 | ||
| 绕z轴转动惯量 | 400 000 | ||
| 第1轴侧偏刚度 | -420 000 | ||
| 第2轴侧偏刚度 | -420 000 | ||
| 第3轴侧偏刚度 | -450 000 | ||
| 第4轴侧偏刚度 | -450 000 | ||
| 质心高度 | 1 175 | ||
| 质心到第1轴的距离 | 4 600 | ||
| 质心到第2轴的距离 | 2 950 | ||
| 质心到第3轴的距离 | 3 050 | ||
| 质心到第4轴的距离 | 4 700 | ||
| 第1轴到第2轴的距离 | 1 650 | ||
| 第2轴到第3轴的距离 | 6 000 | ||
| 第3轴到第4轴的距离 | 1 650 |
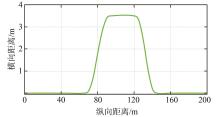
图3
Double lane change轨迹图"
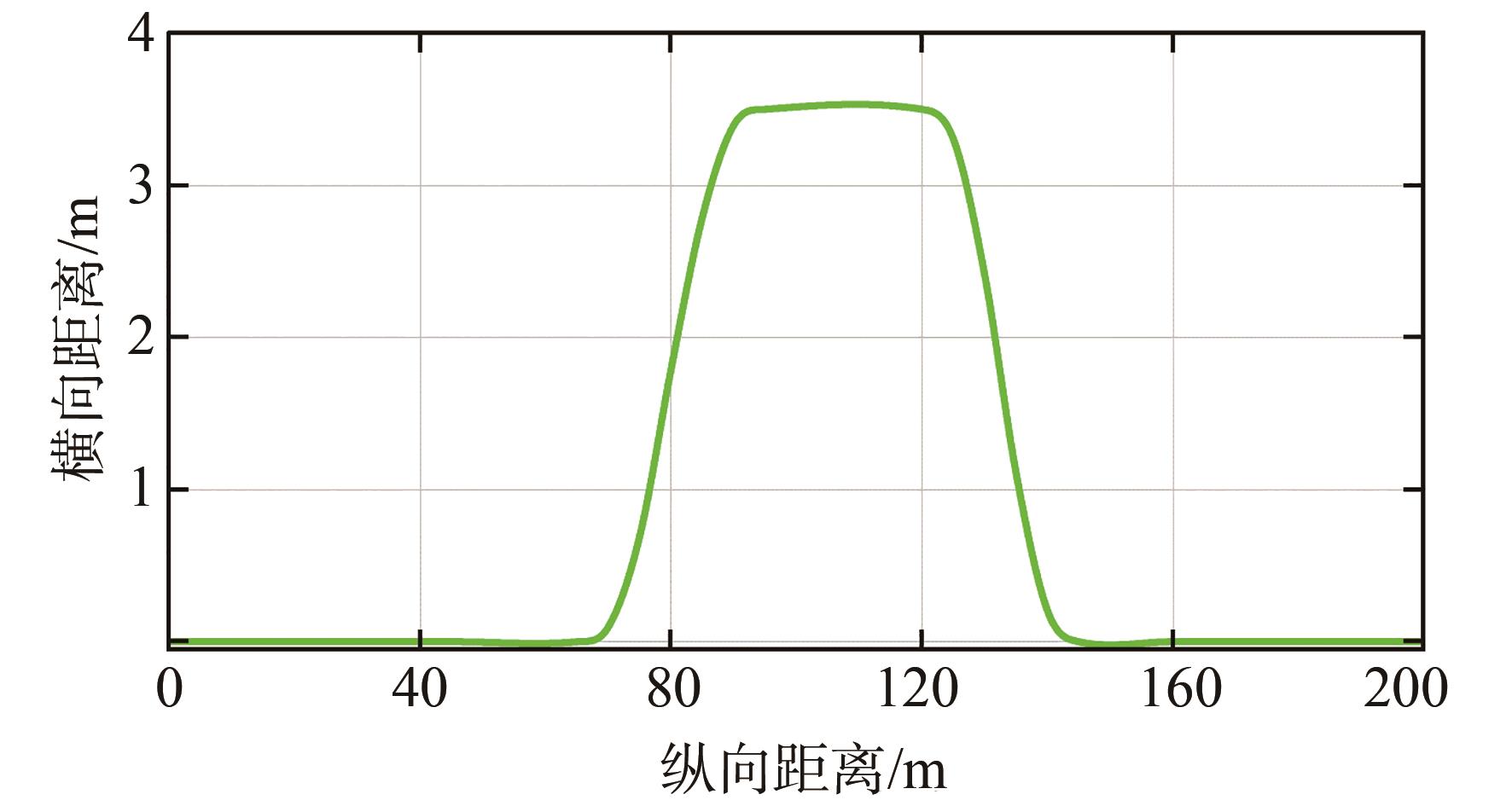
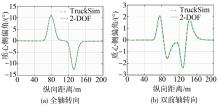
图4
Double lane change工况下的质心侧偏角对比图"
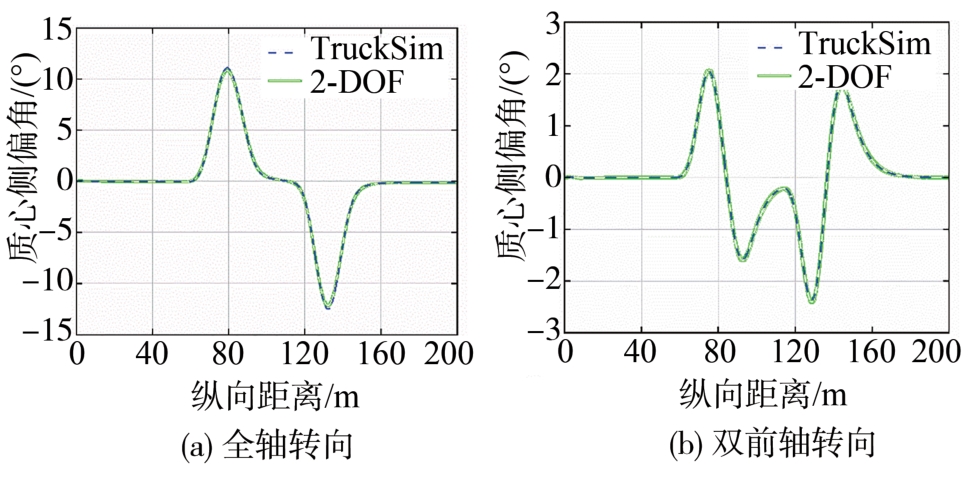
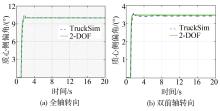
图5
10°角阶跃工况下的质心侧偏角对比图"
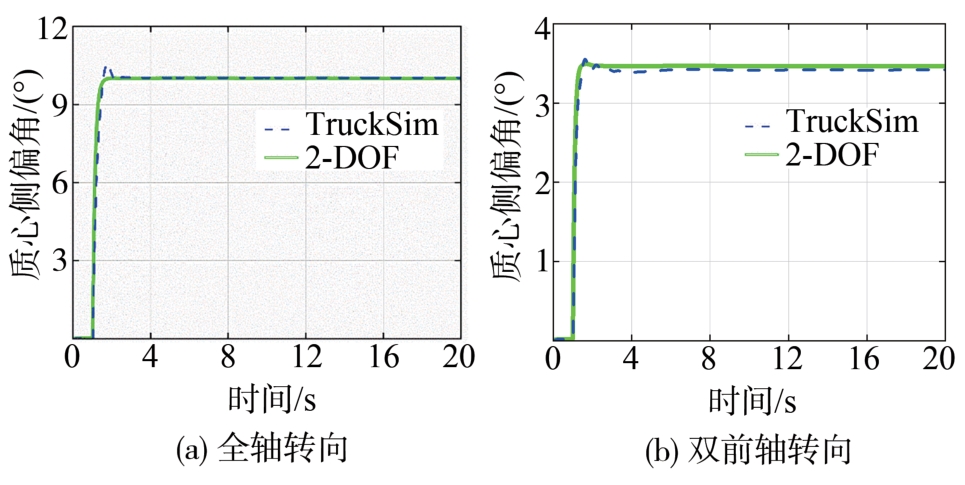
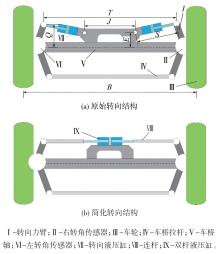
图6
车桥结构图Ⅰ-转向力臂;Ⅱ-右转角传感器;Ⅲ-车轮;Ⅳ-车桥拉杆;Ⅴ-车桥轴;Ⅵ-左转角传感器;Ⅶ-转向液压缸;Ⅷ-连杆;Ⅸ-双杆液压缸。"

表2
车桥结构数据"
| 参数符号 | 参数名称 | 数值 | 单位 |
|---|---|---|---|
| 轮距 | 2 334 | ||
| 左右液压缸与车桥轴连接宽度 | 350 | ||
| 液压缸与车桥轴连接高度 | 200 | ||
| 左右转向力臂间距 | 1 676 | ||
| 转向力臂高度 | 250 | ||
| 液压缸位于中位长度 | 665 |
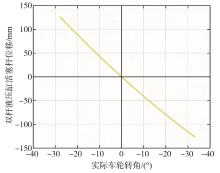
图7
双杆液压缸活塞杆位移与实际转角的关系图"
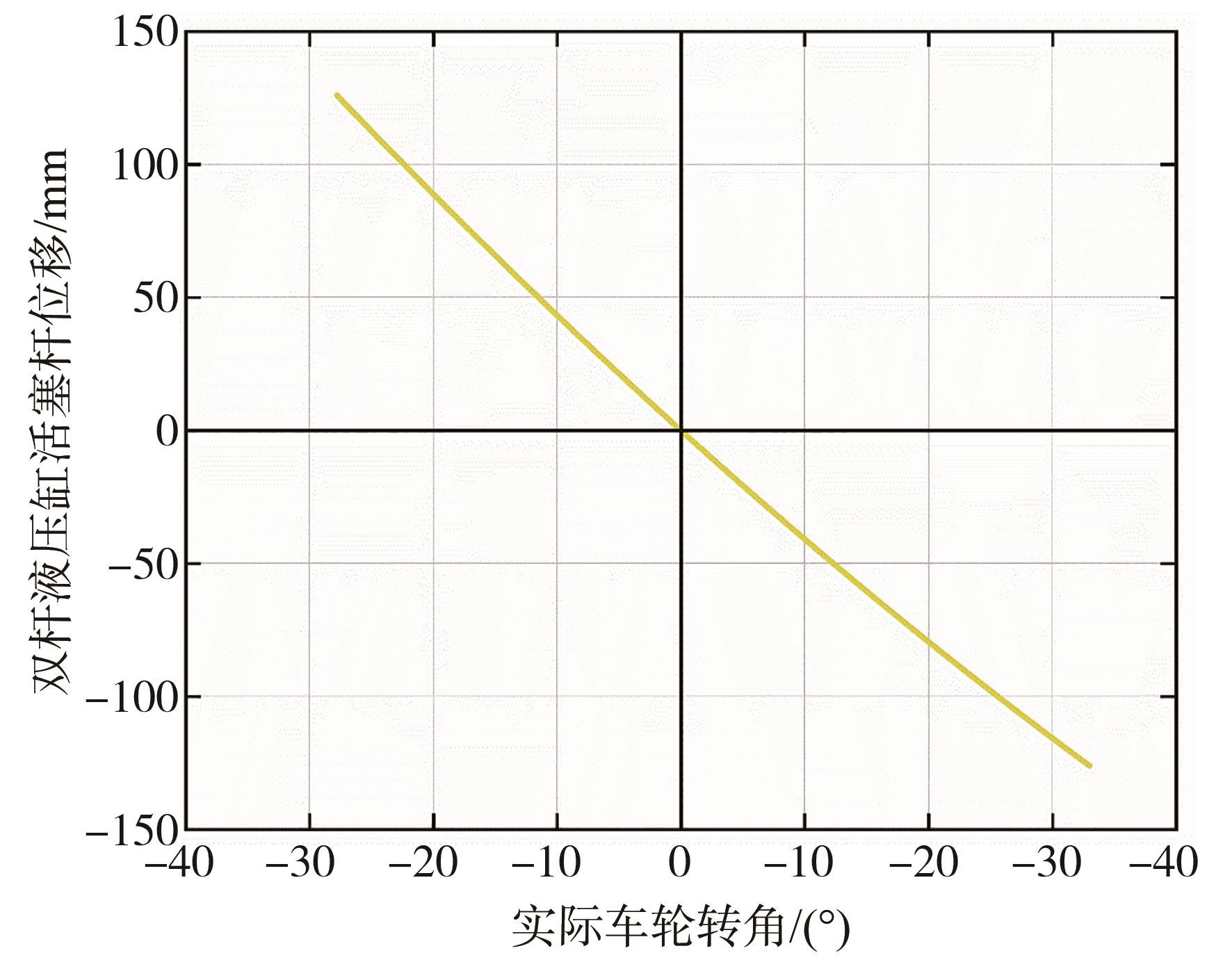
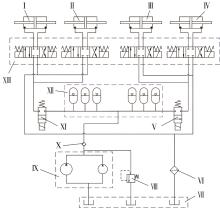
图8
液压原理图Ⅰ-第1轴双杆液压缸;Ⅱ-第2轴双杆液压缸;Ⅲ-第3轴双杆液压缸;Ⅳ-第4轴双杆液压缸;Ⅴ-电磁阀1;Ⅵ-过滤器;Ⅶ-油箱;Ⅷ-溢流阀;Ⅸ-液压泵组;Ⅹ-单向阀;Ⅺ-电磁阀2;Ⅻ-蓄能器组;XIII-转向电磁阀组。"
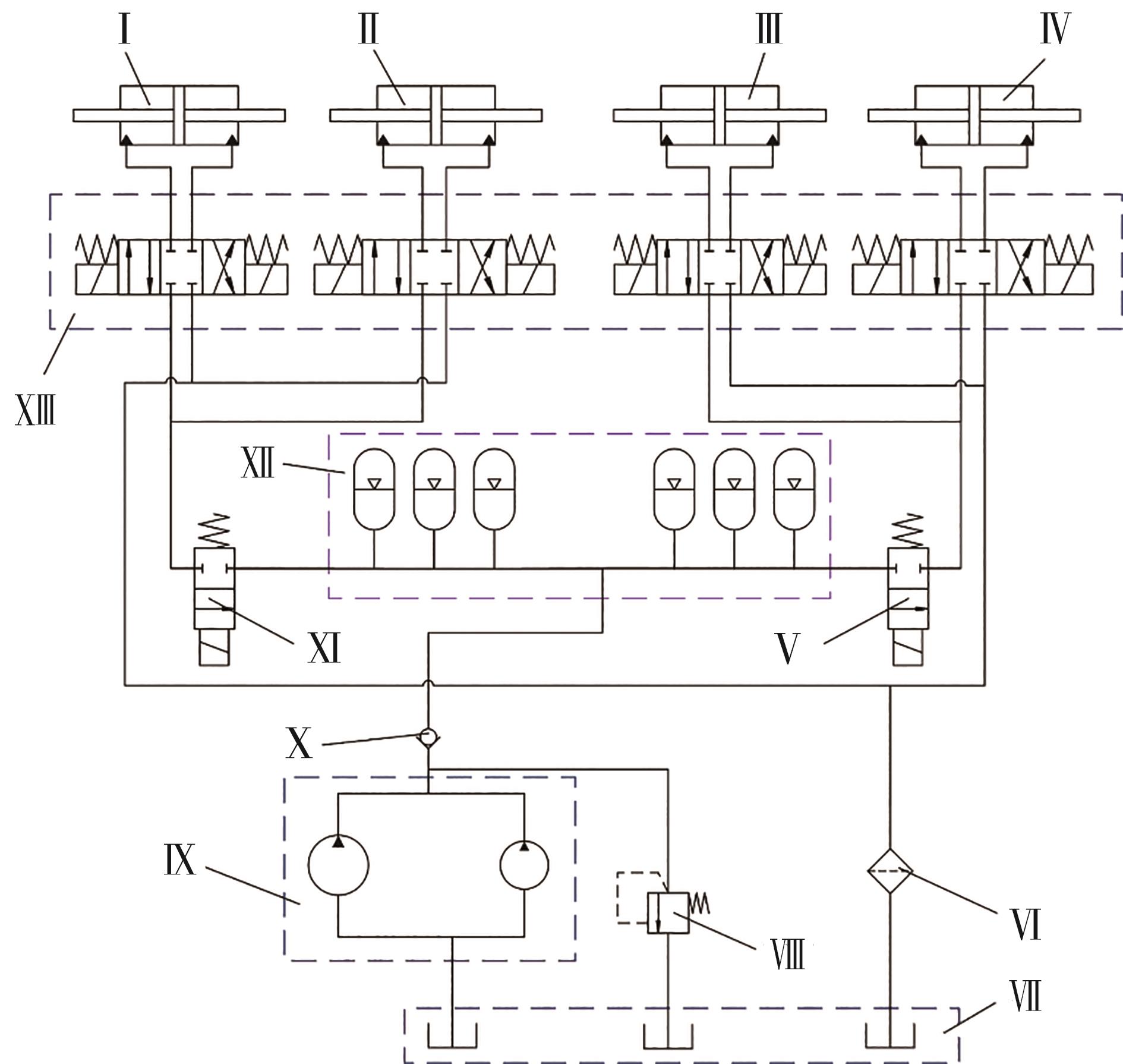
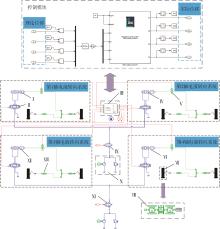
图9
液压仿真图Ⅰ-第1轴双杆液压缸;Ⅱ-转向电磁阀;Ⅲ-联仿模块;Ⅳ-第2轴双杆液压缸;Ⅴ-位移传感器;Ⅵ-第4轴双杆液压缸;Ⅶ-车轮;Ⅷ-质量模块和机械弹簧及阻尼器模块;Ⅸ-电磁阀1;Ⅹ-溢流阀、油箱和液压泵;Ⅺ-电磁阀2;Ⅻ-第3轴双杆液压缸;XIII-线性弹簧。"
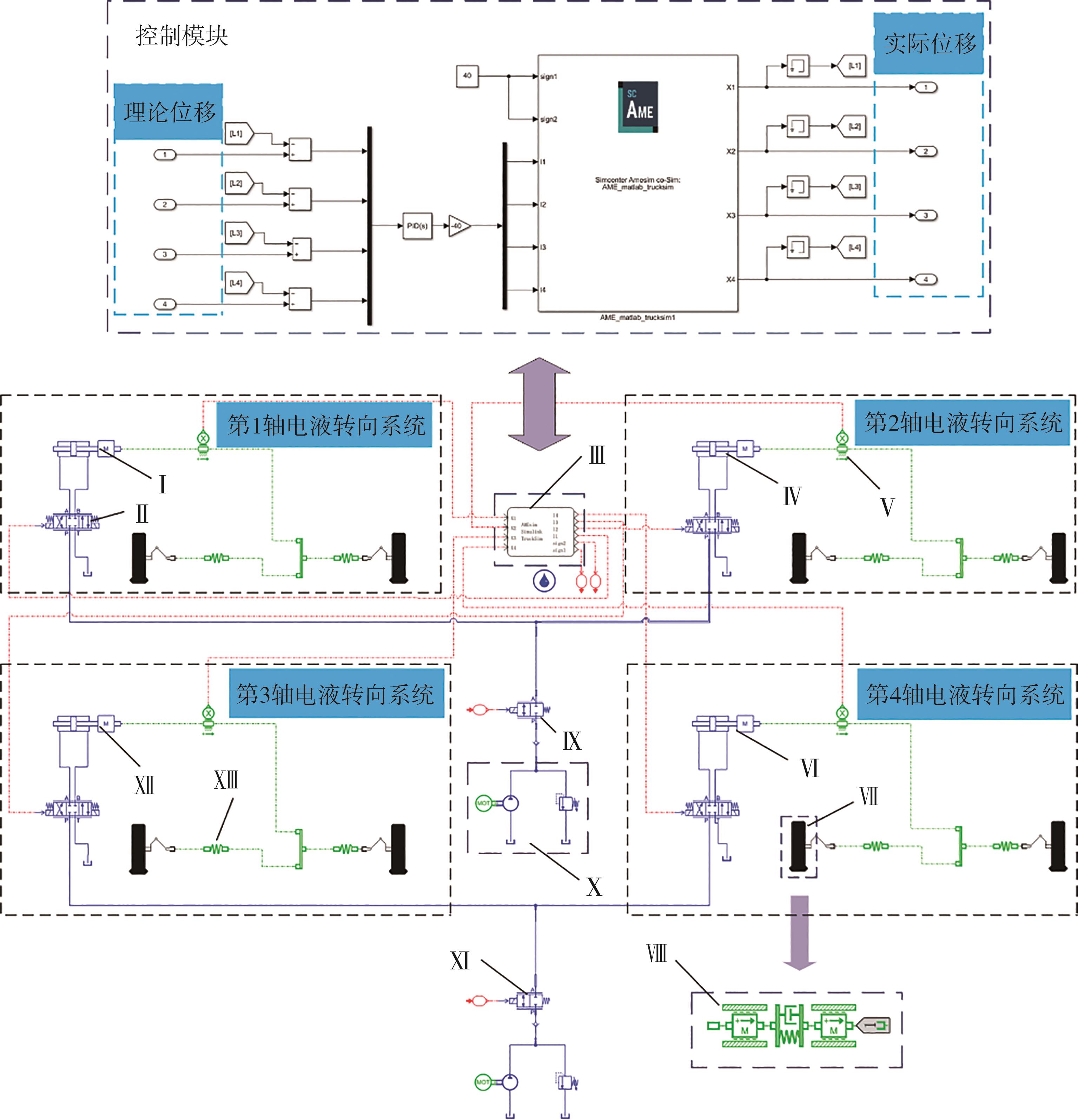
表3
液压元件参数"
| 参数符号 | 参数名称 | 数值 | 单位 |
|---|---|---|---|
| 双杆液压缸缸径 | 80 | ||
| 双杆液压缸活塞杆径 | 50 | ||
| 双杆液压缸行程 | |||
| 液压泵排量 | 39 | ||
| 液压泵转速 | 2 000 | r/min | |
| 蓄能器充气压力 | 12.5 | ||
| 蓄能器公称容积 | 10 | ||
| 蓄能器额定压力 | 33 | ||
| 溢流阀开口压力 | 25 | ||
| 质量模块 | 1 060 | ||
| 机械弹簧的弹簧刚度 | |||
| 阻尼器的阻尼率 | 30 000 | ||
| 线性弹簧的弹簧刚度 |
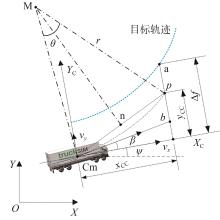
图10
目标轨迹预测图"
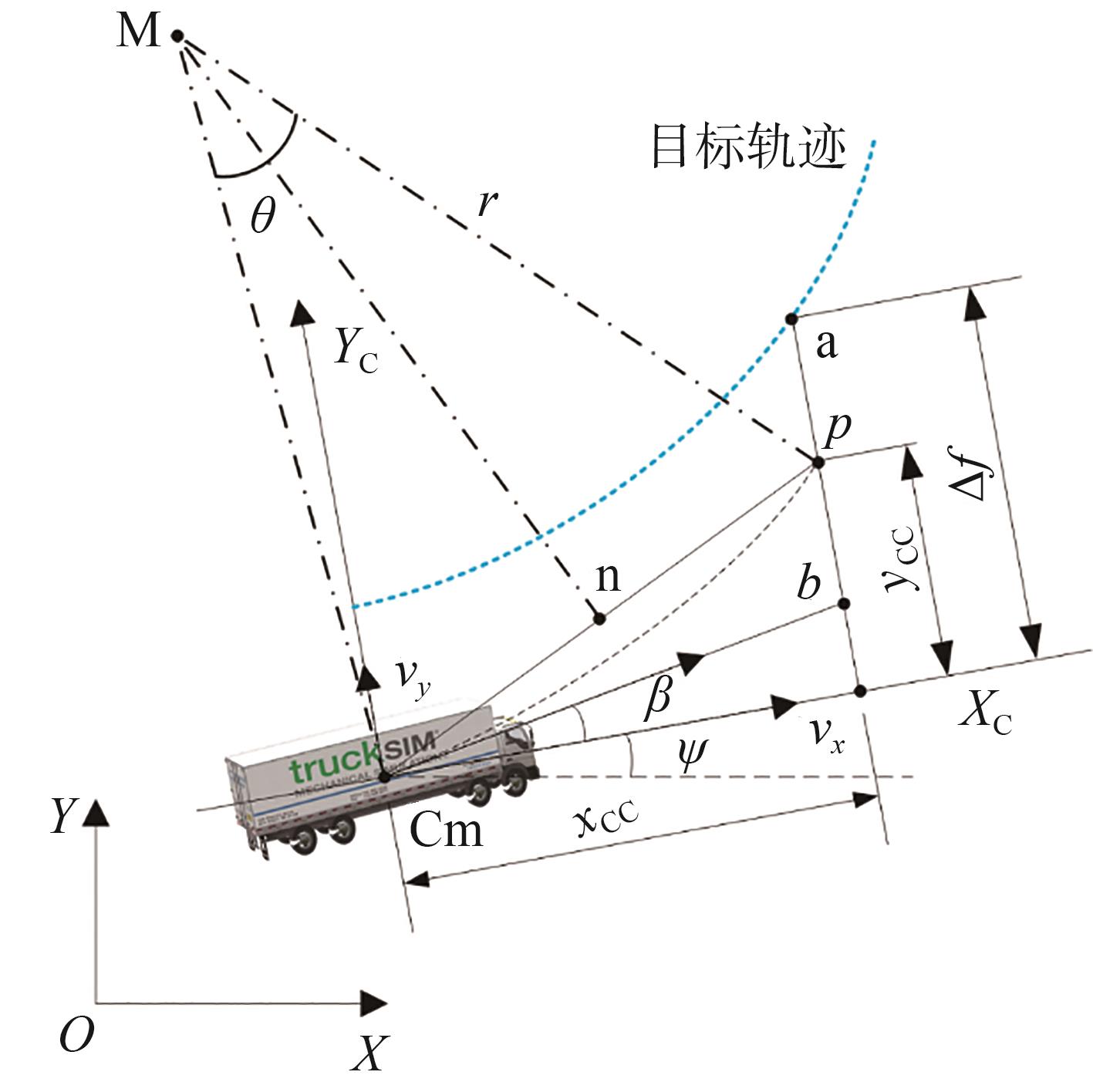
图11
PSMC模型结构图"
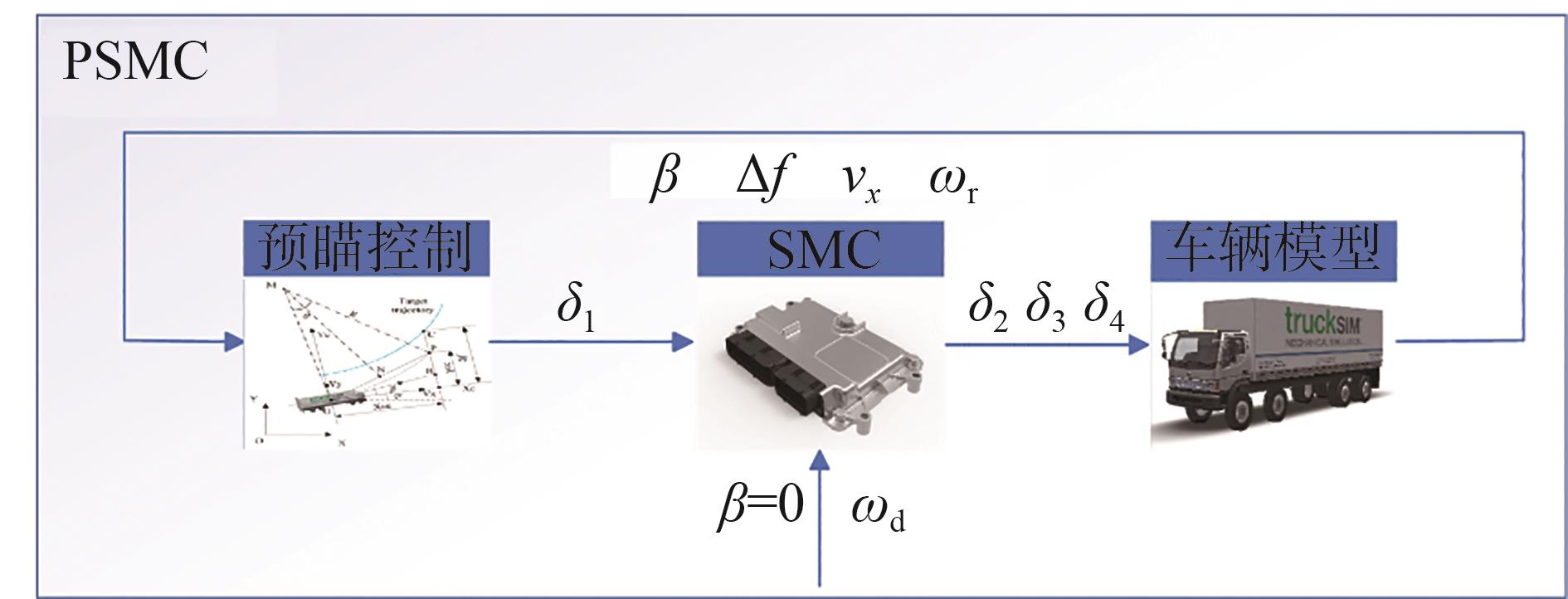
图12
整体控制流程图"
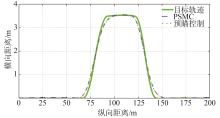
图13
Double lane change工况下跟踪对比效果图"
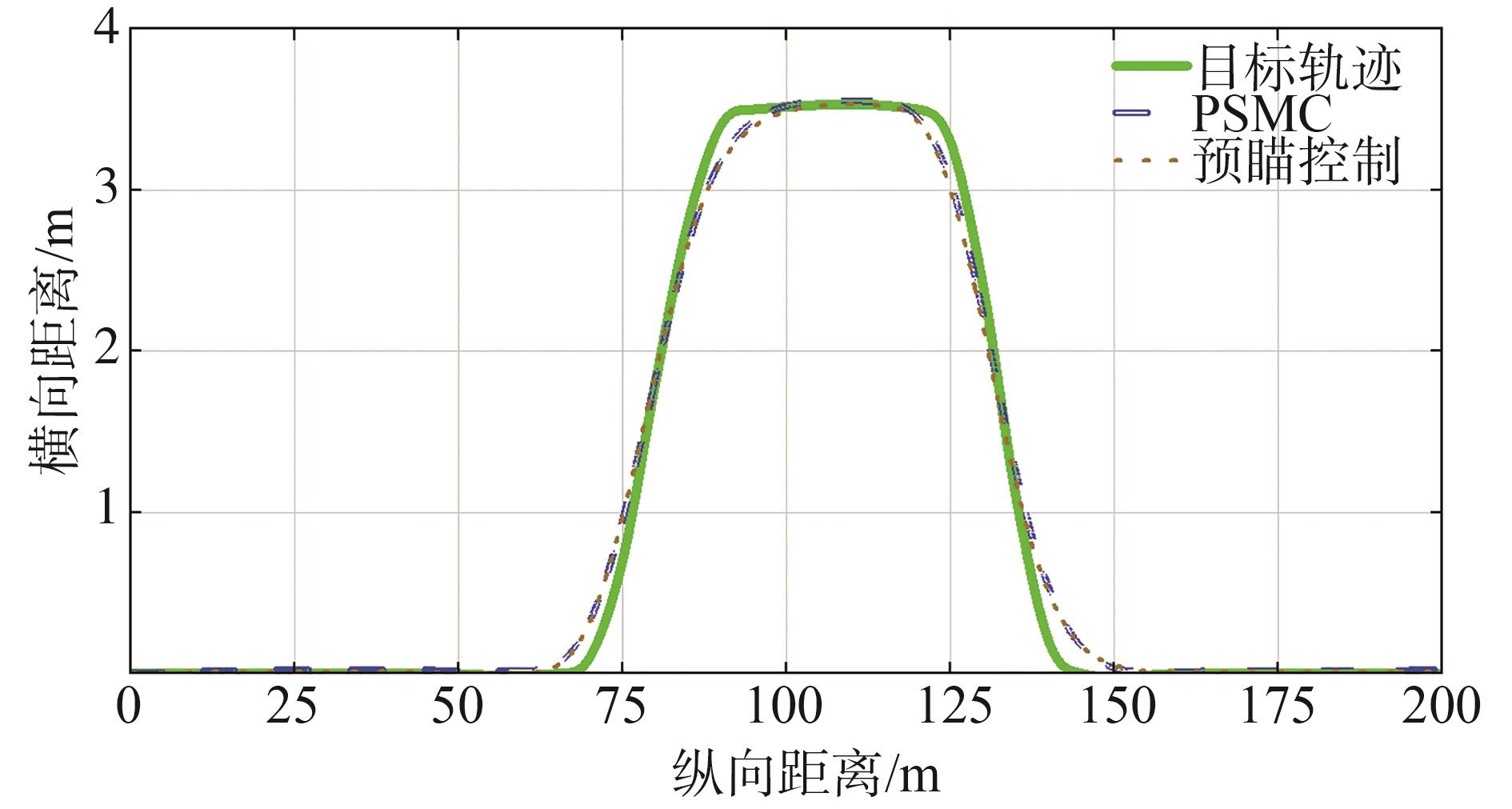
图14
Double lane change工况下横向误差图"
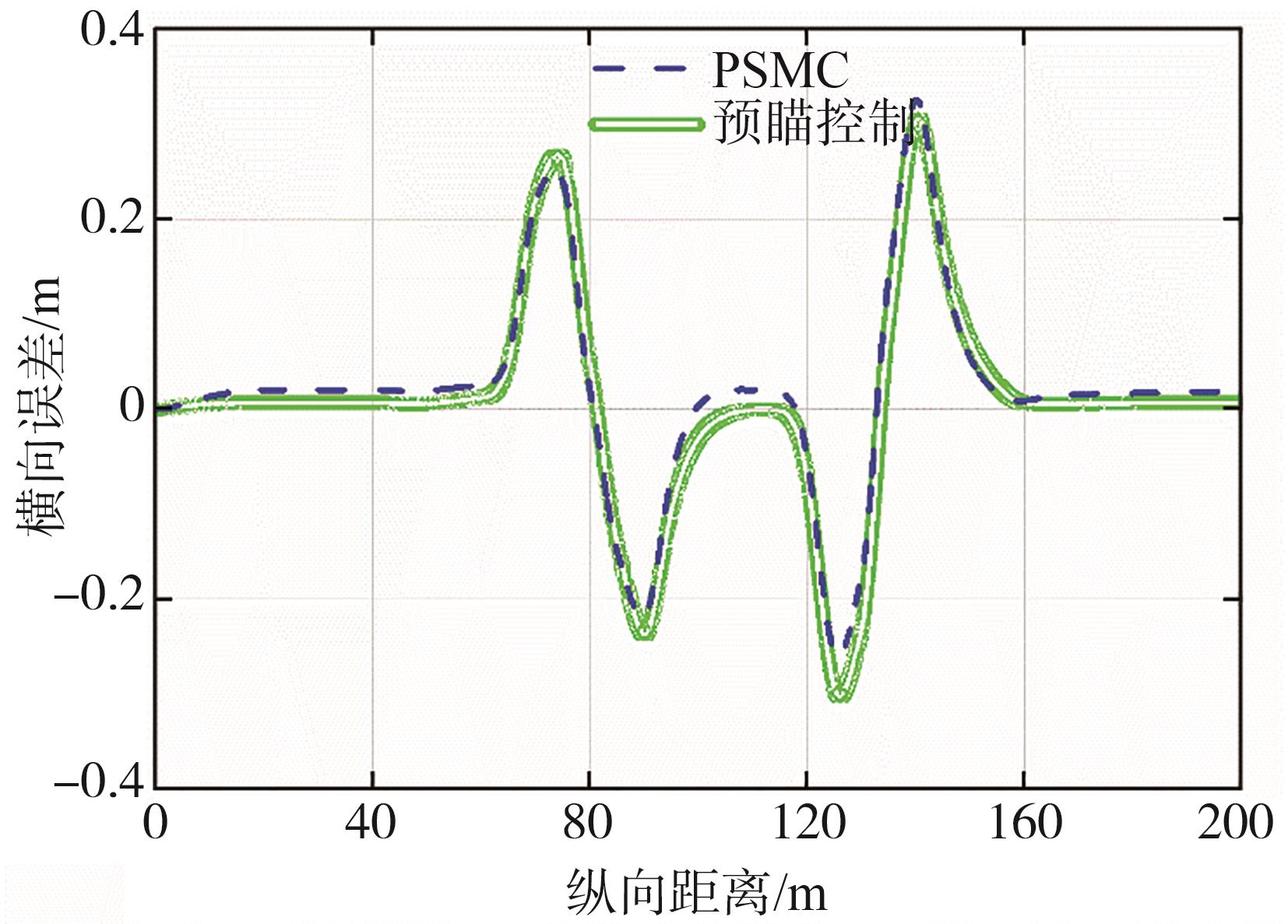
图15
Double lane change工况的车辆航向角误差"
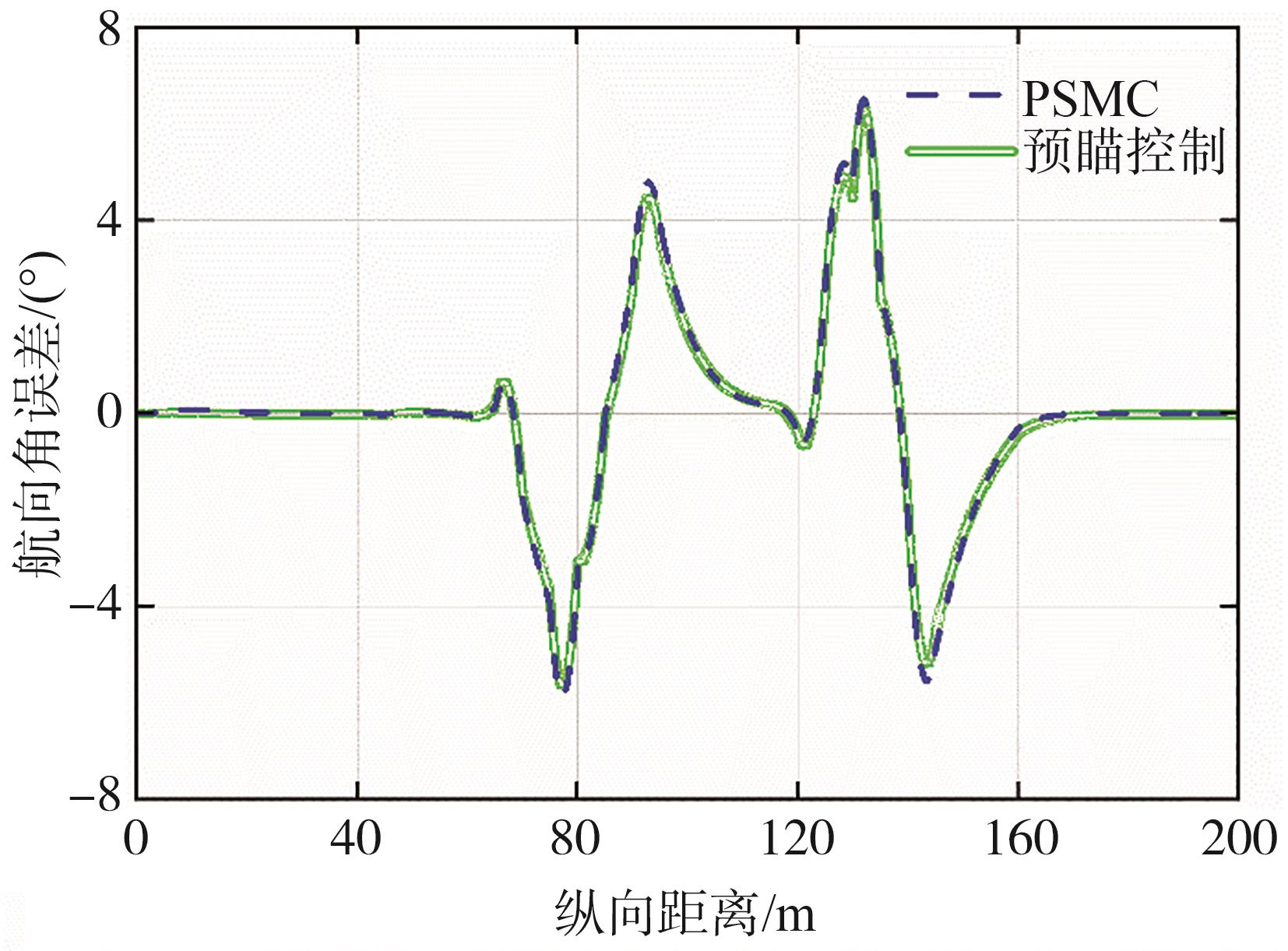
表4
横向跟踪误差均方值比较"
| 道路名称 | PSMC | 预瞄控制 | 性能提升 |
|---|---|---|---|
| Double lane change | 0.107 4 | 0.011 86 | |
| Handing course | 0.017 05 | 0.031 38 |
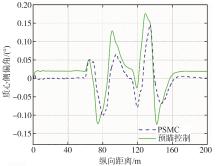
图16
不同控制的质心侧偏角对比图"
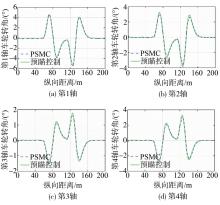
图17
Double lane change工况下各轴转角对比图"
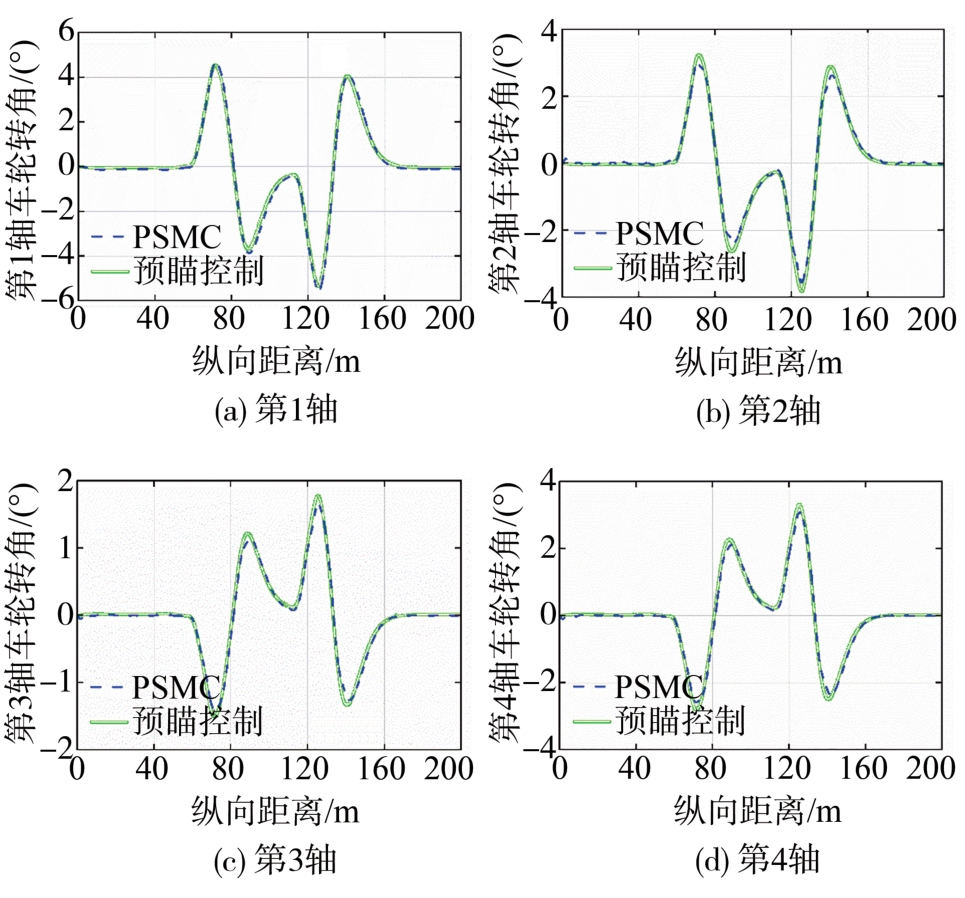
表5
Double lane change工况下的PSMC转角优化"
| 参数名称 | PSMC | 预瞄控制 | 优化结果 |
|---|---|---|---|
| 最大质心侧偏角 | |||
| 第2轴最大转角 | |||
| 第3轴最大转角 | |||
| 第4轴最大转角 |
图18
Double lane change工况下各轴双杆液压缸位移图"
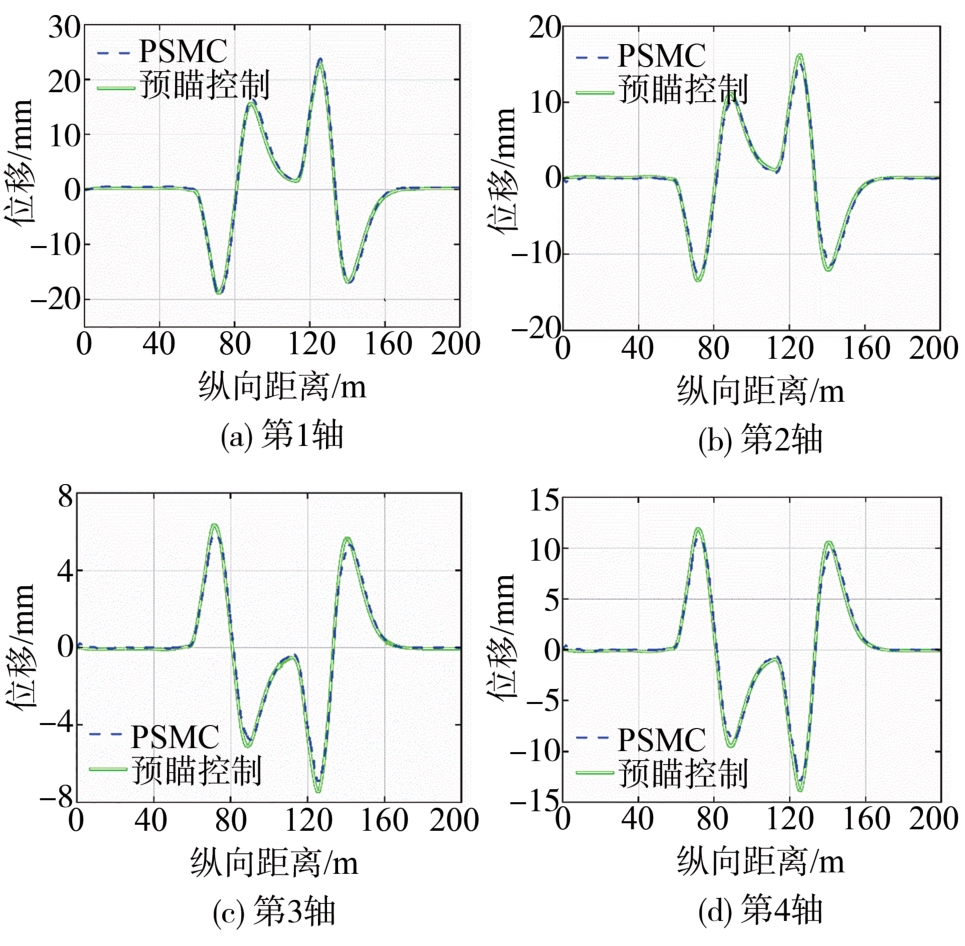
图19
Double lane change工况下各轴双杆液压缸流量图"


图20
Handing course曲线跟踪效果图"
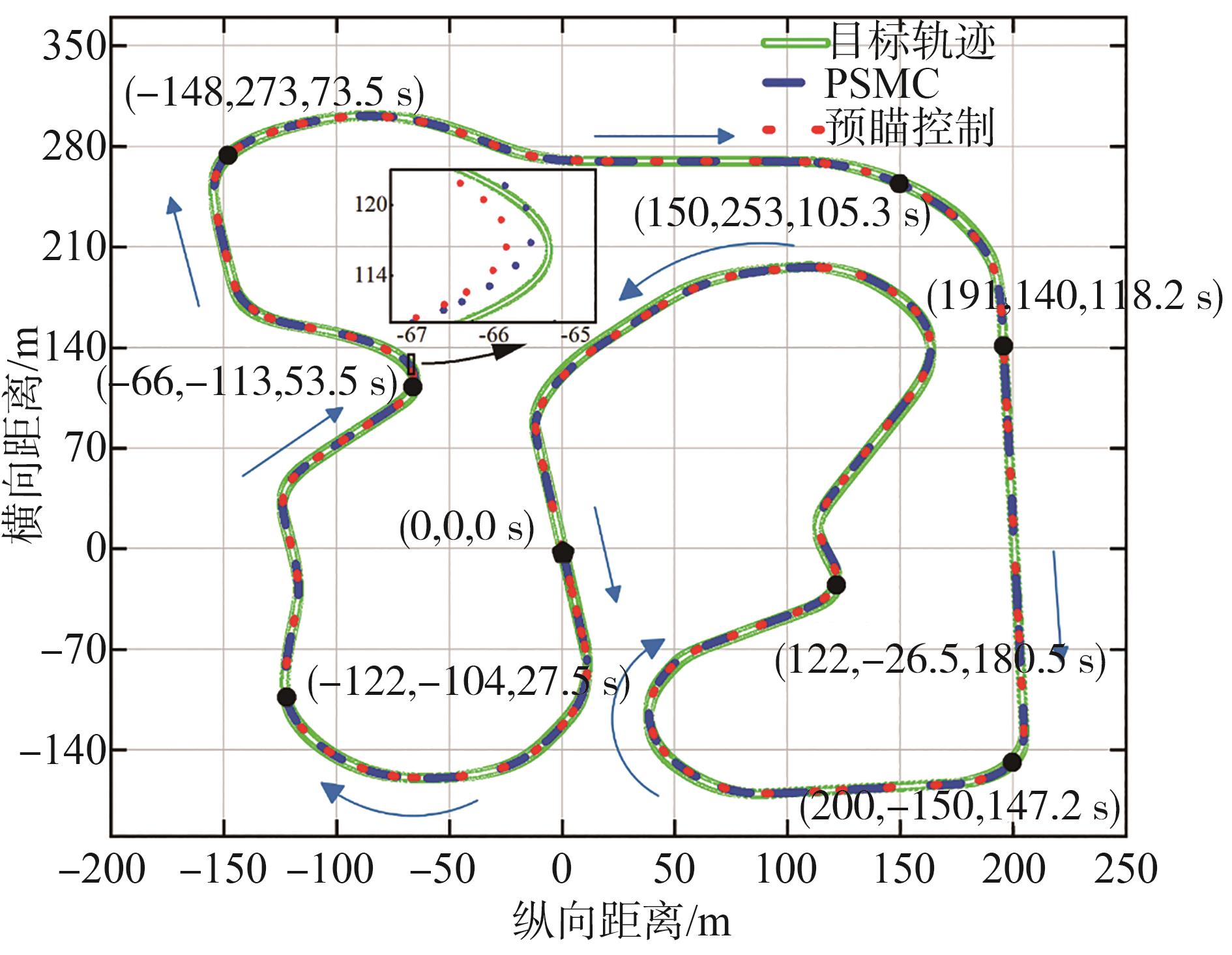
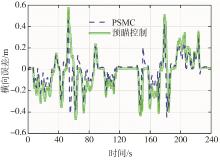
图21
Handing course横向跟踪误差图"
图22
Handing course曲线下的车辆航向角"
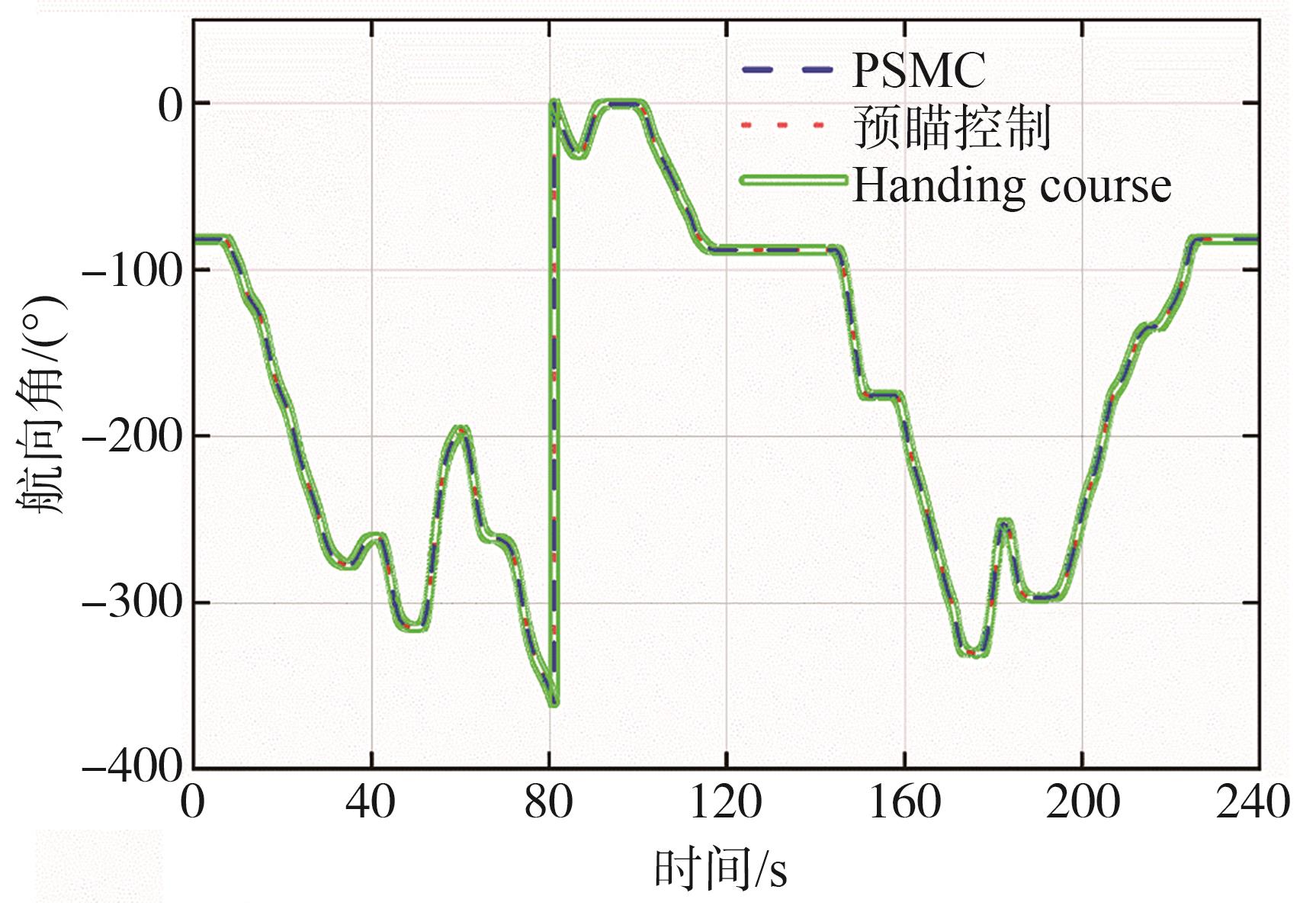
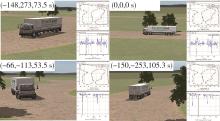
图23
车辆实时位置和场景"
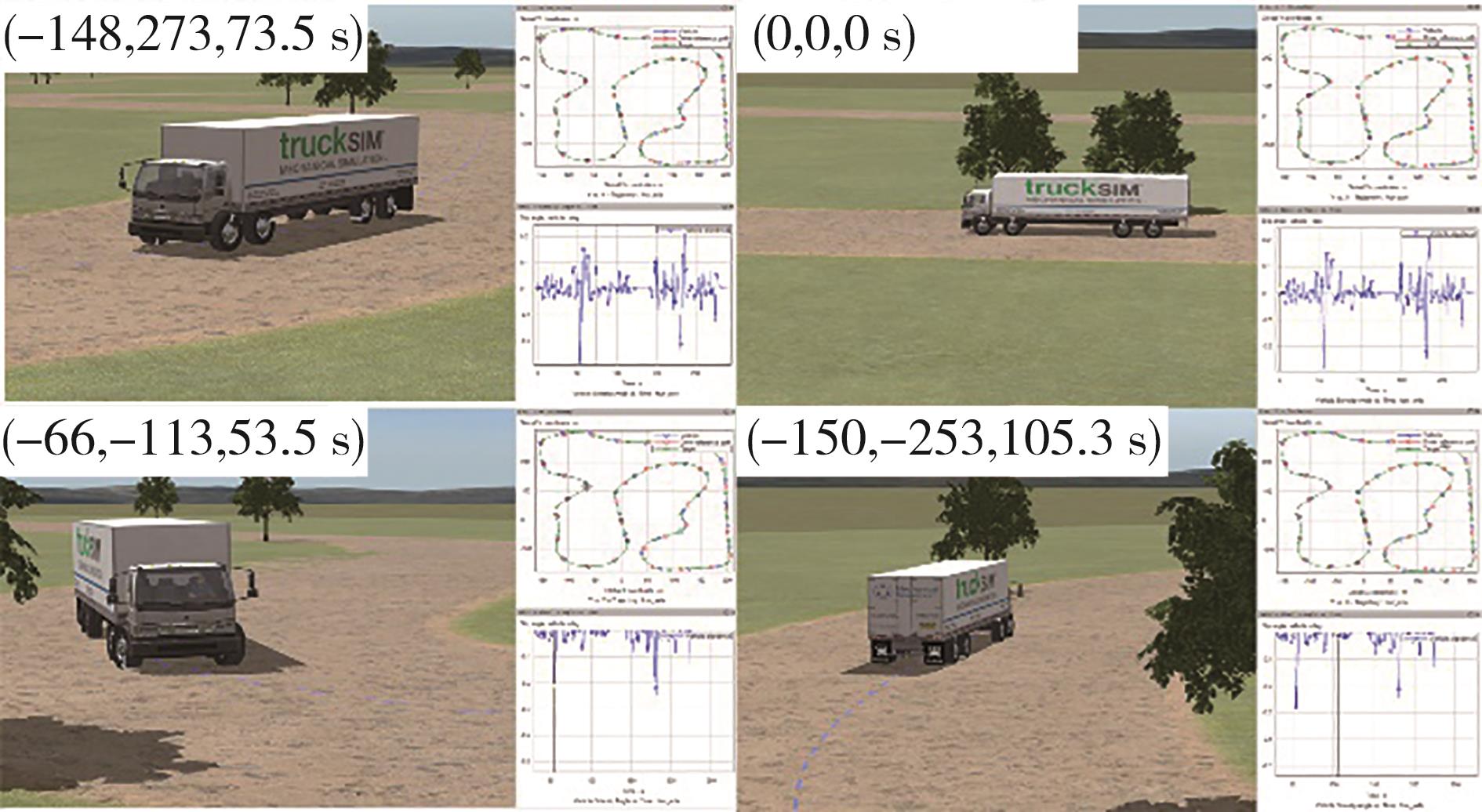
图24
不同控制的质心侧偏角对比图"
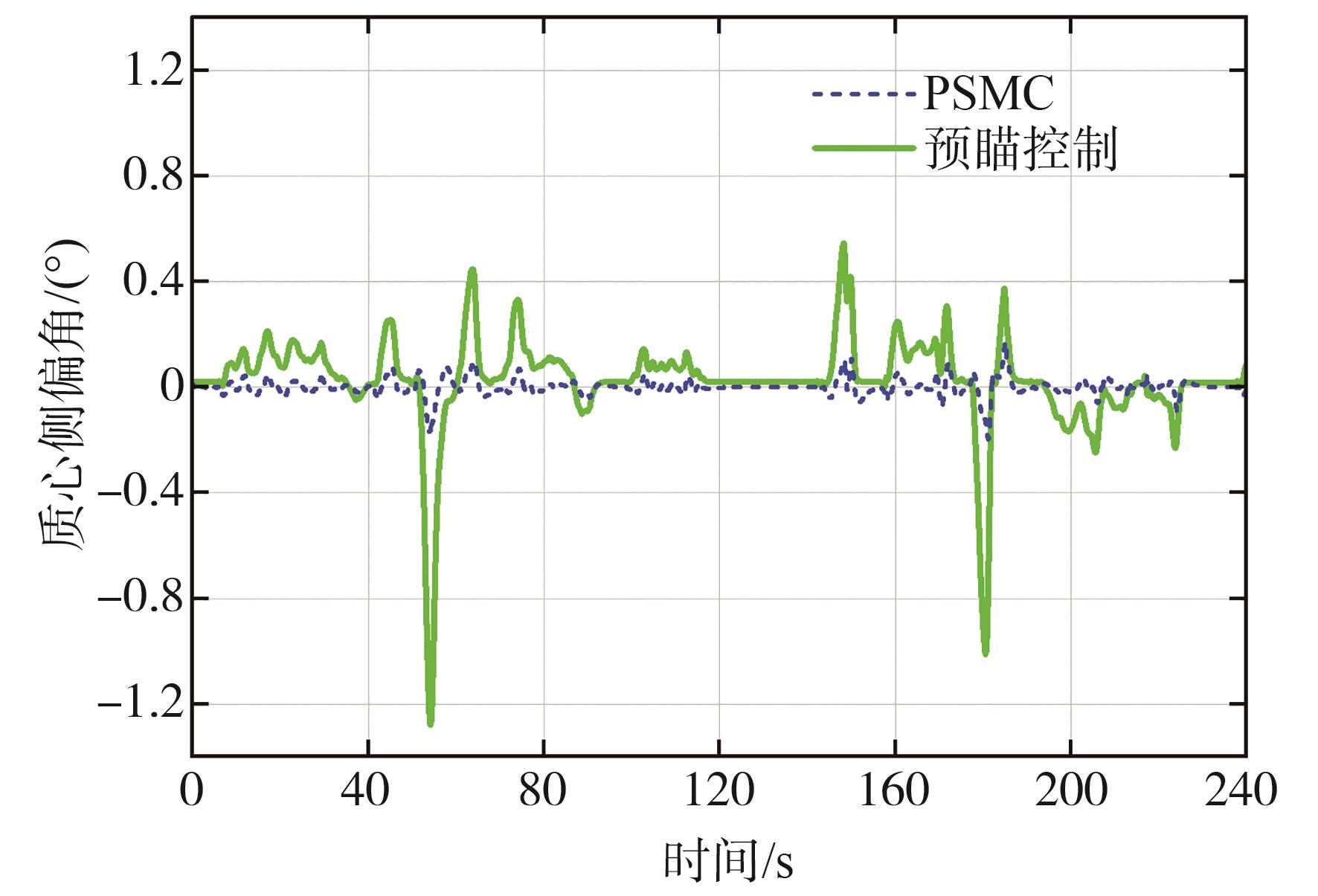
图25
Handing course工况下各轴转角对比图"
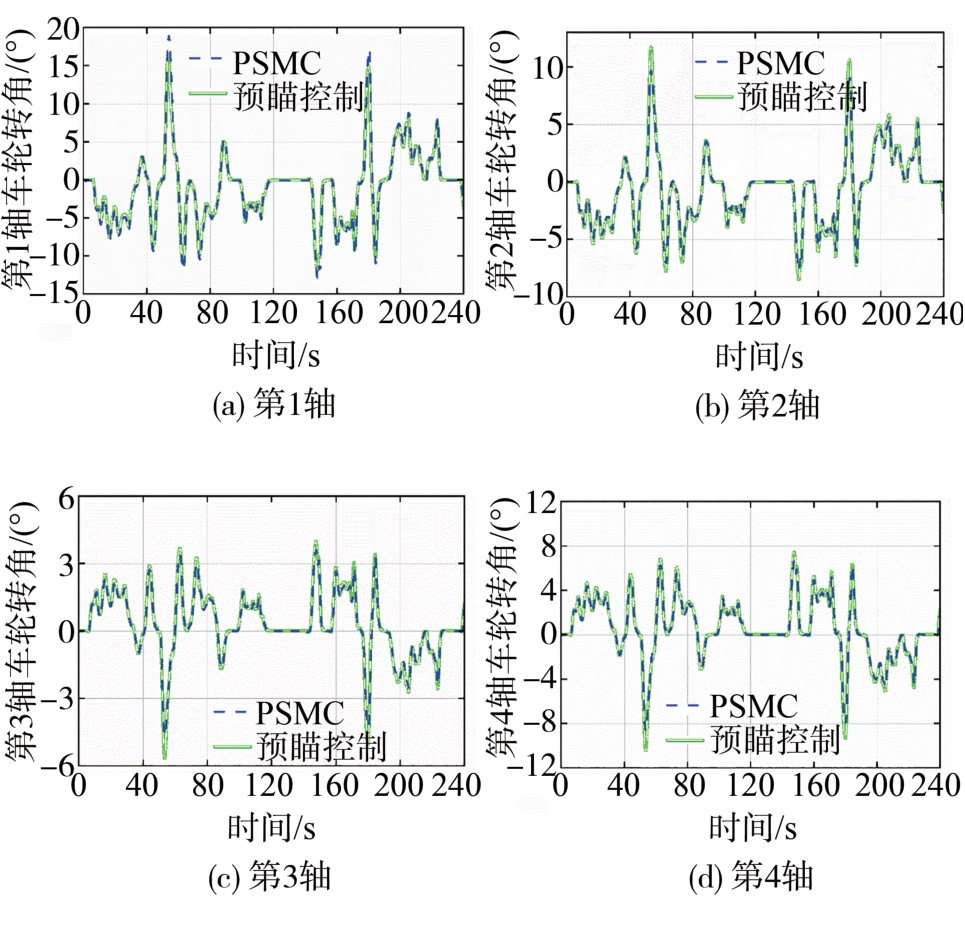
表6
Handing course工况下的PSMC优化"
| 参数名称 | PSMC | 预瞄控制 | 优化结果 |
|---|---|---|---|
| 最大质心侧偏角 | |||
| 第2轴最大转角 | |||
| 第3轴最大转角 | |||
| 第4轴最大转角 |
图26
Handing course工况下各轴双杆液压缸位移对比图"
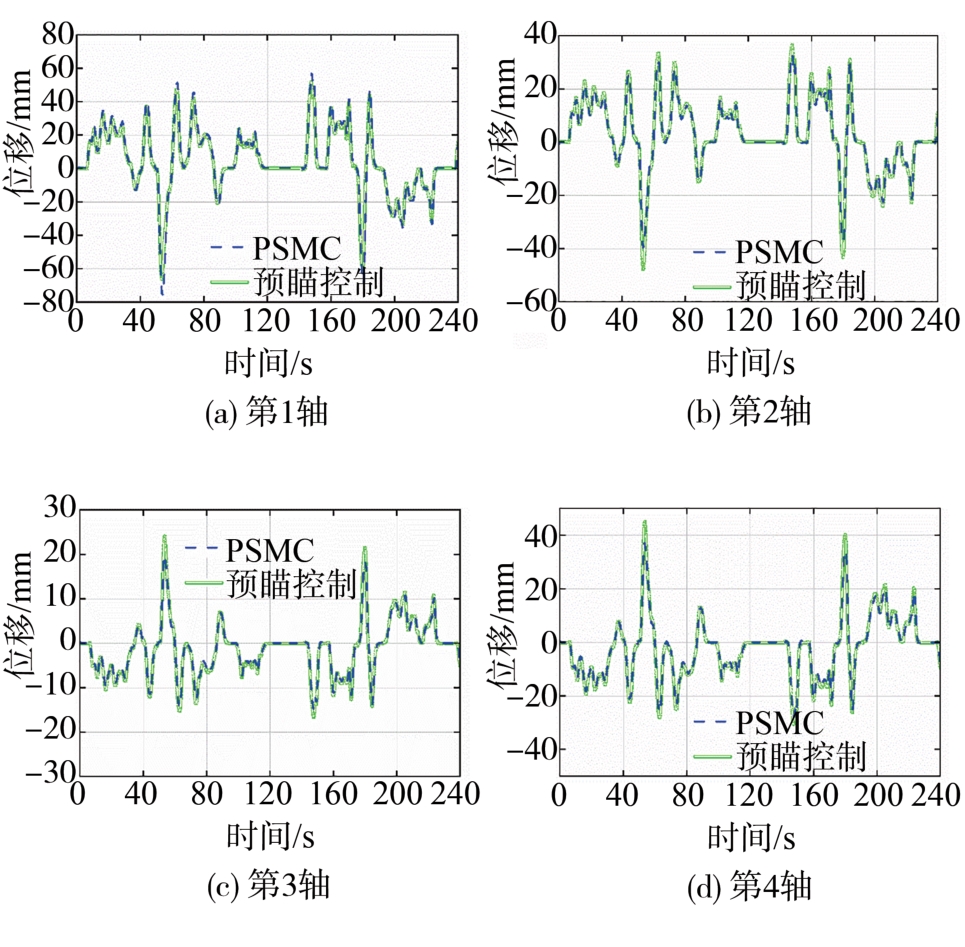
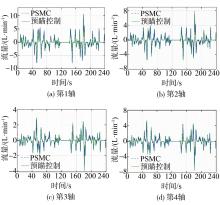
图27
Handing course工况下各轴双杆液压缸流量对比图"
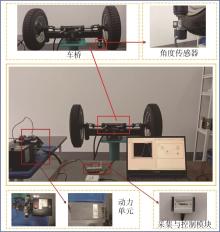
图28
转向实验平台"
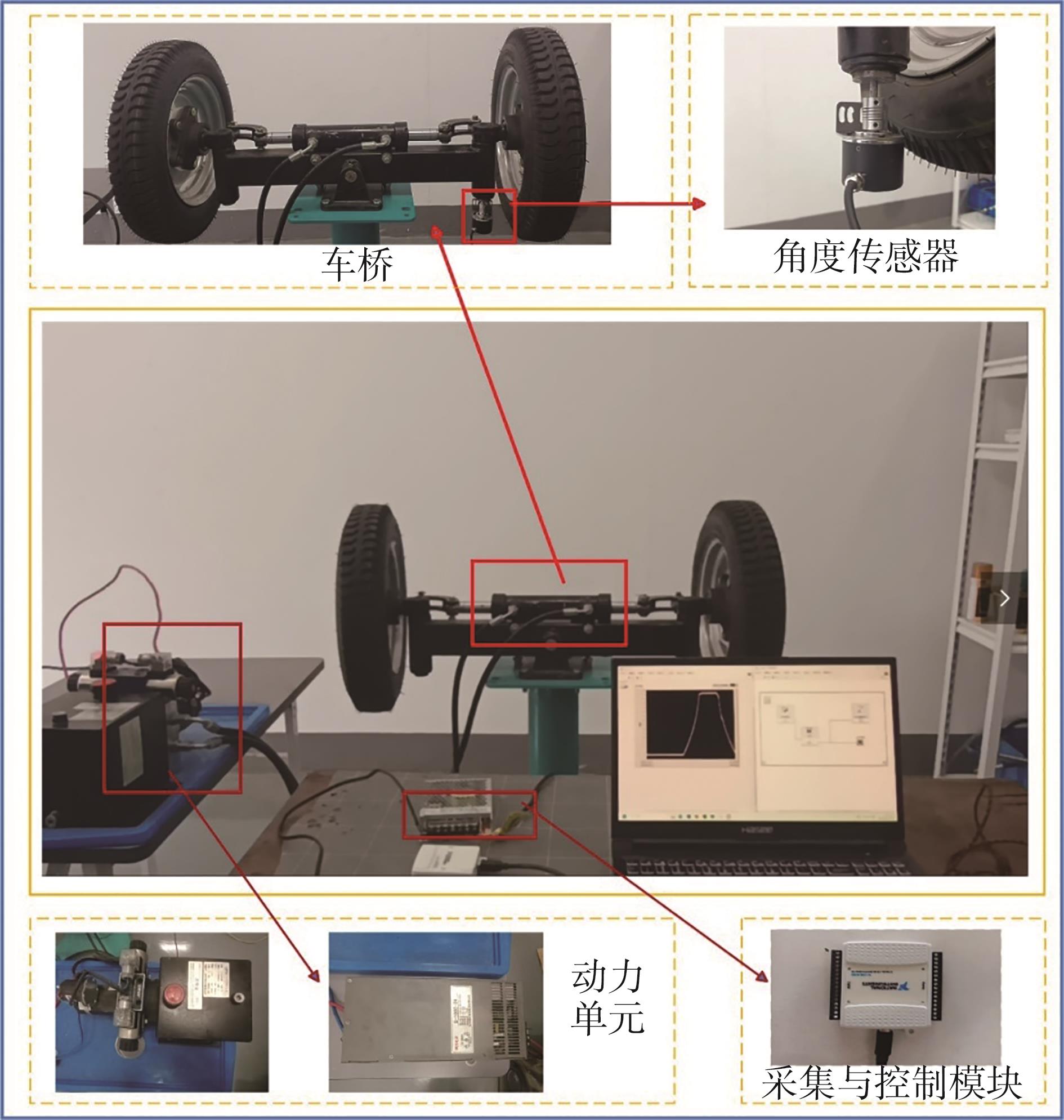

图29
信号测试图"
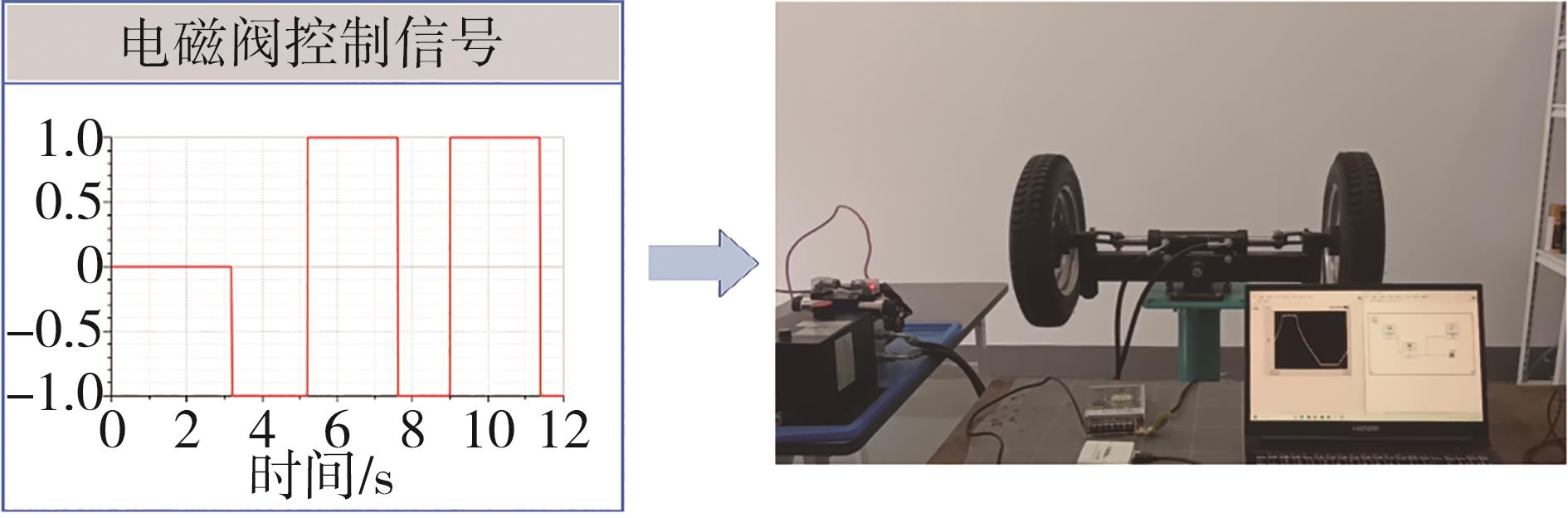
图30
电磁阀脉冲工况信号输入图"
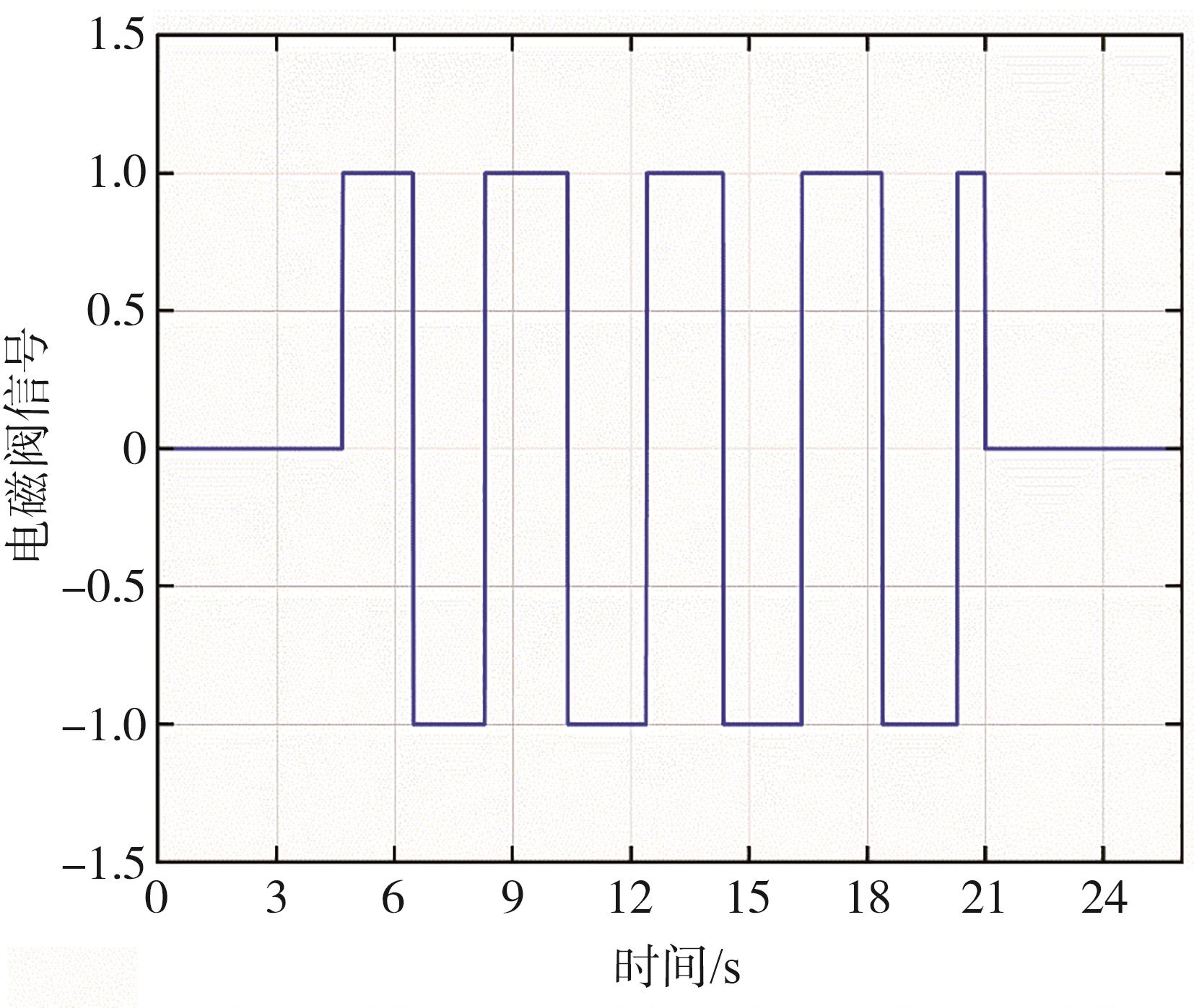
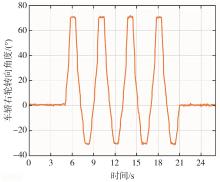
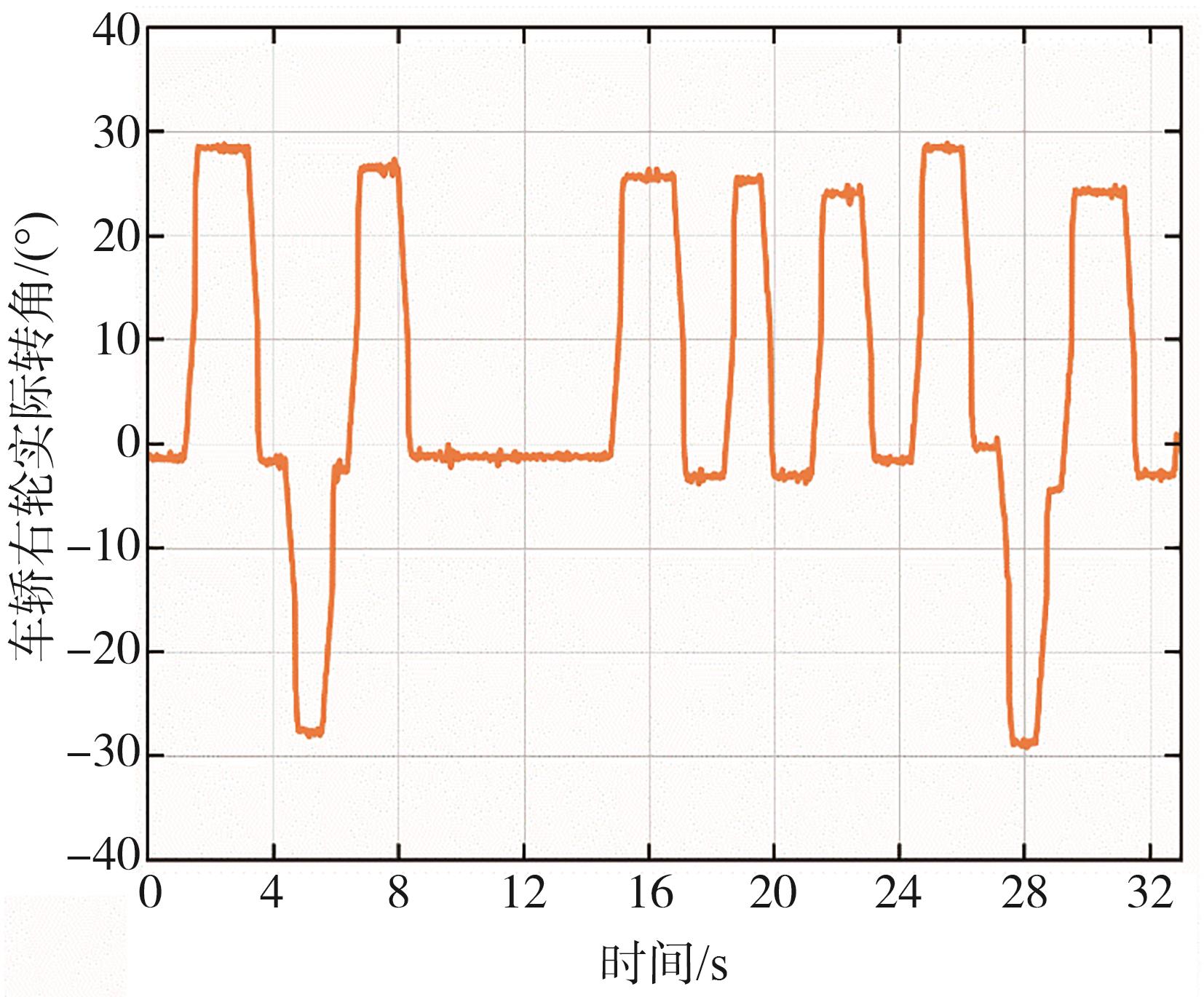
图31
脉冲工况转角图"
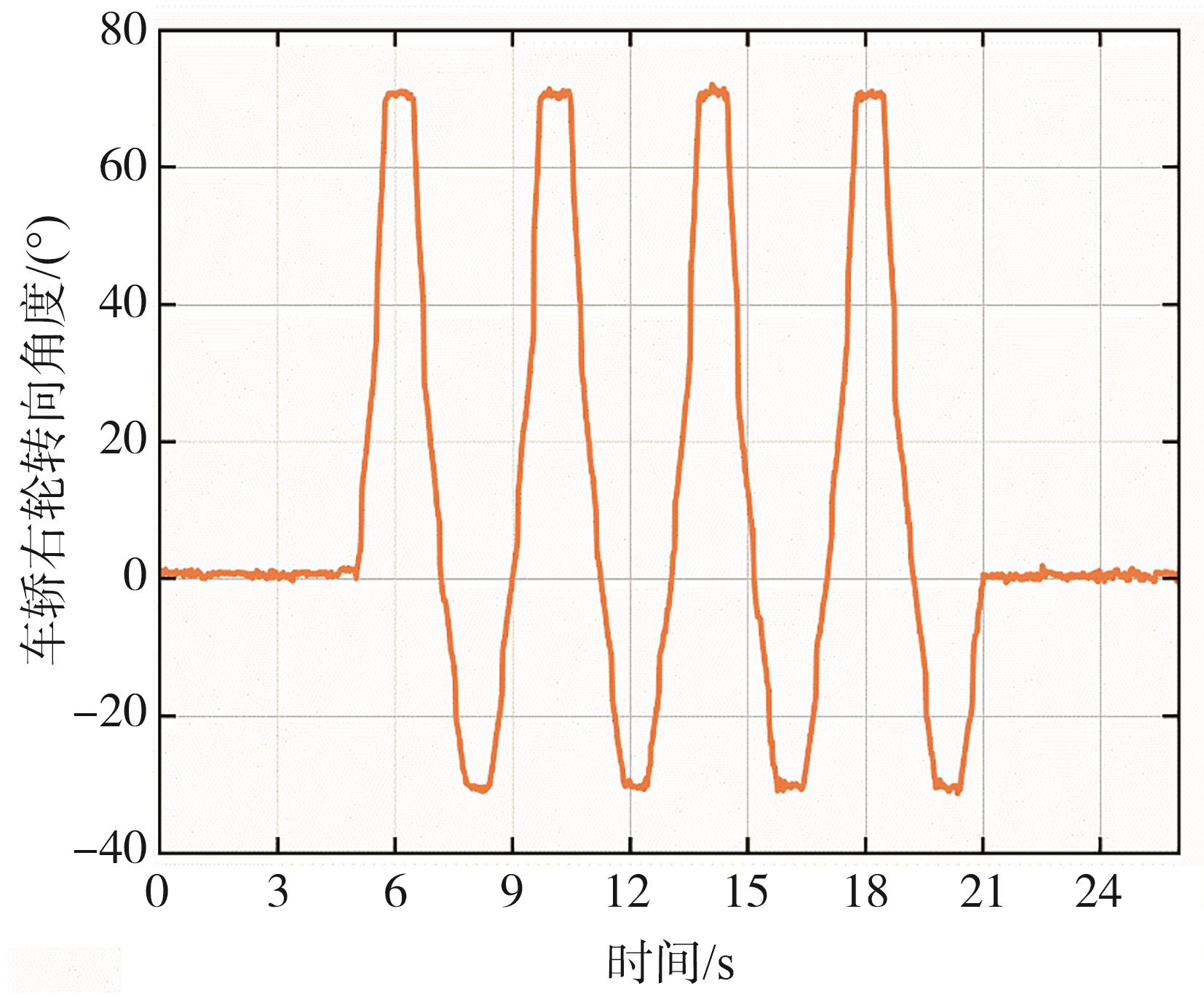
图32
双变道工况信号输入图"
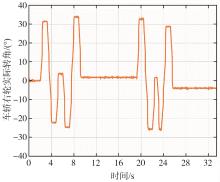
图33
双变道工况转角图"

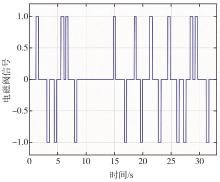
图34
随机工况信号输入图"
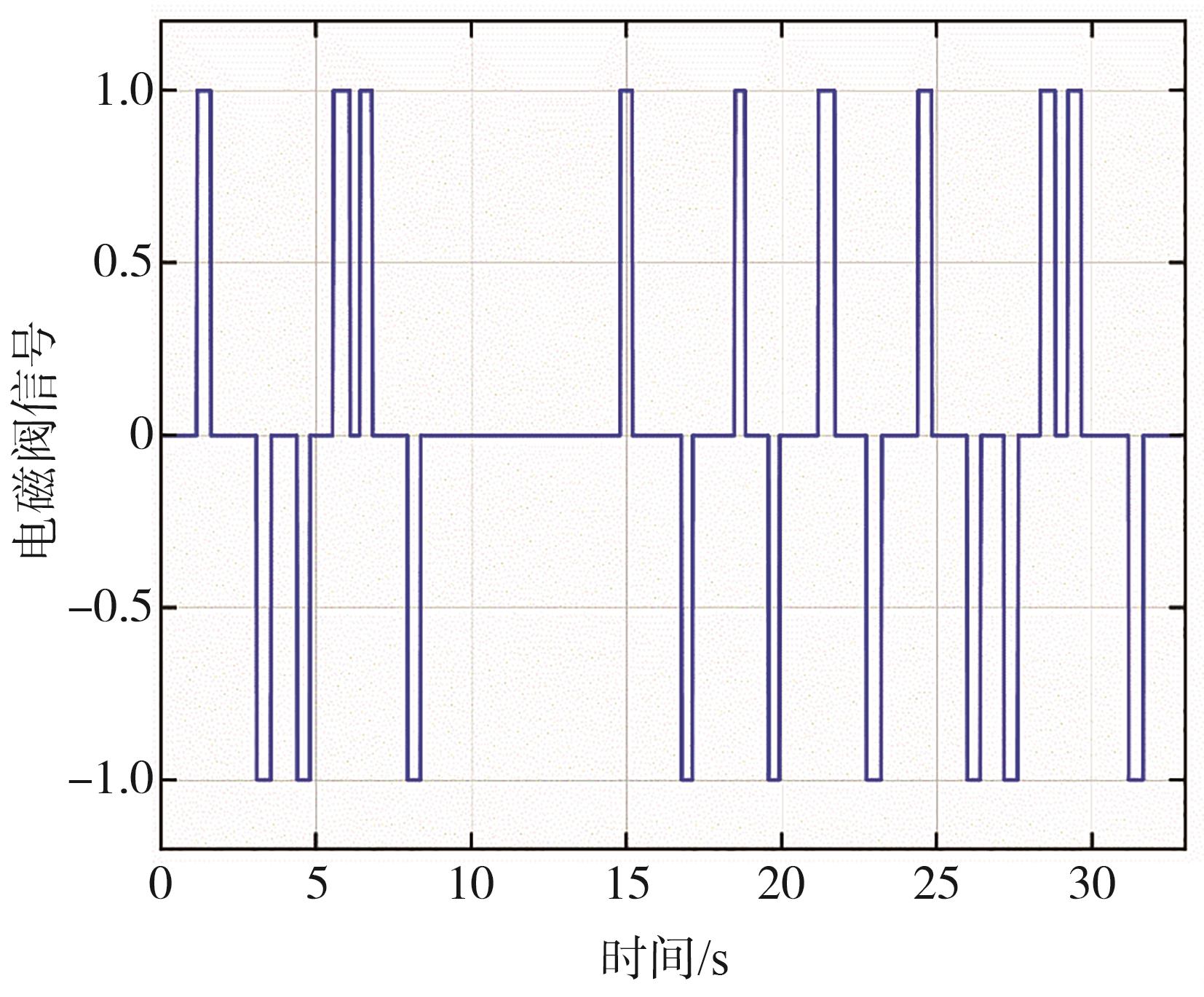
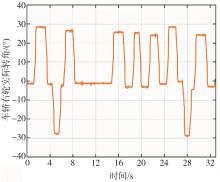
图35
随机工况转角图"
| [1] | XU F, ZHOU C, LIU X, et al. GRNN inverse system based decoupling control strategy for active front steering and hydro-pneumatic suspension systems of emergency rescue vehicle [J]. Mechanical Systems and Signal Processing, 2022, 167: 108595. |
| [2] | LIU M, HUANG J, CAO M. Handling stability improvement for a four-axle hybrid electric ground vehicle driven by in-wheel motors [J]. IEEE Access, 2017, 6: 2668-2682. |
| [3] | PAVLENKO O, DUN S, KHARKOV O, et al. Analysis of the stress state of the 4-axle dump truck lifting mechanism hydraulic cylinder support [J]. Transportation Research Procedia, 2022, 63: 347-359. |
| [4] | TANG G, TANG C, CLARAMUNT C, et al. Geometric a-star algorithm: an improved a-star algorithm for AGV path planning in a port environment [J]. IEEE Access, 2021, 9: 59196-59210. |
| [5] | WANG Y, ZHAO X, LI S, et al. Path tracking of eight in-wheel-driving autonomous vehicle: controller design and experimental results[C]. 2019 IEEE International Conference on Unmanned Systems (ICUS). IEEE, 2019: 672-677. |
| [6] | LU S, JIANG Y, XU X, et al. Adaptive heading control strategy for unmanned ground vehicle with variable wheelbase based on robust-active disturbance rejection control [J]. Control Engineering Practice, 2024, 142: 105786. |
| [7] | ZHANG S, SHEN A, LUO X, et al. The path following of intelligent unmanned vehicle scheme based on adaptive sliding mode-model predictive control [J]. Journal of the Franklin Institute, 2023, 360(8): 5658-5688. |
| [8] | ZHANG Y, HUANG Y, WANG H, et al. A comparative study of equivalent modelling for multi-axle vehicle [J]. Vehicle System Dynamics, 2018, 56(3): 443-460. |
| [9] | DU H, WANG L, CHEN J, et al. Integral sliding-mode tracking control for heavy vehicle electrohydraulic power steering system [J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1455-1466. |
| [10] | ZHANG Z, DU H, CHEN S, et al. A novel electro-hydraulic servo steering system for ackermann steering of heavy multi-axle vehicle [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(12): 2610-2624. |
| [11] | WANG Y, LIU X, REN Z, et al. Synchronized path planning and tracking for front and rear axles in articulated wheel loaders [J]. Automation in Construction, 2024, 165: 105538. |
| [12] | TOPAÇ M, TANRIVERDI A, ÇOLAK O, et al. Analysis of the failure modes and design improvement of an eccentrically loaded connecting rod for a double front axle steering linkage prototype [J]. Engineering Failure Analysis, 2021, 122: 105204. |
| [13] | ZHANG Y, NI J, TIAN H, et al. Integrated robust dynamics control of all-wheel-independently-actuated unmanned ground vehicle in diagonal steering [J]. Mechanical Systems and Signal Processing, 2022, 164: 108263. |
| [14] | LI W, YANG F, MAO E, et al. Design and verification of crab steering system for high clearance self-propelled sprayer [J]. 2022, 12(11): 1893. |
| [15] | JIANG Y, MENG H, CHEN G, et al. Differential-steering based path tracking control and energy-saving torque distribution strategy of 6WID unmanned ground vehicle [J]. Energy, 2022, 254: 124209. |
| [16] | XU T, LIU X, LI Z, et al. A sliding mode control scheme for steering flexibility and stability in all-wheel-steering multi-axle vehicles [J]. International Journal of Control, Automation and Systems, 2023, 21(6): 1926-1938. |
| [17] | AHISKA K, OZGOREN M K, LEBLEBICIOGLU M K. Energy and time optimal autopilot for electric vehicles performing ackerman cornering [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 17258-17270. |
| [18] | CAO D, TANG B, JIANG H, et al. Study on low-speed steering resistance torque of vehicles considering friction between tire and pavement [J]. Applied Sciences, 2019, 9(5): 1015. |
| [19] | 朱先民, 宋健. 基于LuGre模型的商用车原地转向阻力矩 [J]. 清华大学学报(自然科学版), 2019, 59(7): 575-579. |
| ZHU Xianmin, SONG Jian. LuGre model for the steering resistance torque of stationary commercial trucks[J]. Journal of Tsinghua University (Science and Technology), 2019, 59(7): 575-579. | |
| [20] | 叶小华, 岑豫皖, 赵韩,等. 基于液压弹簧刚度的阀控非对称缸建模仿真 [J]. 中国机械工程, 2011, 22(1): 23-27. |
| [1] | 王志红,曾嘉荣,胡杰,张志凌,杨东浩,纪越丰. 基于P-PP的轻型商用车路径跟踪控制[J]. 汽车工程, 2025, 47(4): 669-679. |
| [2] | 胡杰,张志凌,钟杰锋,赵文龙,郑嘉辰,周思龙,屈紫君. 考虑复杂扰动的轻型商用车路径跟踪混合控制方法[J]. 汽车工程, 2024, 46(9): 1576-1586. |
| [3] | 王海,李建国,蔡英凤,陈龙. 基于激光雷达点云的动态驾驶场景多任务分割网络[J]. 汽车工程, 2024, 46(9): 1608-1616. |
| [4] | 颜伏伍,向博文,胡杰,陈锐鹏,张志豪,刘昊岩,高宠智. 基于改进LPV模型的自动驾驶轻型货车横向控制[J]. 汽车工程, 2024, 46(8): 1403-1413. |
| [5] | 韩陌,何洪文,石曼,刘伟,曹剑飞,吴京达. 基于学习的无人驾驶车辆模型预测路径跟踪控制研究[J]. 汽车工程, 2024, 46(7): 1197-1207. |
| [6] | 秦洪懋,江曙,张田田,谢和平,边有钢,李洋. 基于学习型模型预测控制的智能车辆路径跟踪控制[J]. 汽车工程, 2024, 46(10): 1804-1815. |
| [7] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [8] | 张新荣,谭宇航,贾一帆,黄晋,许权宁. 四轮独立驱动电动汽车路径跟踪鲁棒控制[J]. 汽车工程, 2023, 45(2): 253-262. |
| [9] | 吕颖,祁旭,刘秋铮,王鑫煜,陈国迎. 考虑转向延迟特性的自动驾驶车辆路径跟踪控制方法[J]. 汽车工程, 2023, 45(12): 2234-2241. |
| [10] | 胡杰,陈锐鹏,张志豪,向博文,刘昊岩,朱琪,郭启翔. 基于RMPC的自动驾驶货车路径跟踪控制[J]. 汽车工程, 2023, 45(11): 2092-2103. |
| [11] | 李骏,万文星,郝三强,秦武,刘霏霏. 复杂路况下无人驾驶路径跟踪模型预测控制研究[J]. 汽车工程, 2022, 44(5): 664-674. |
| [12] | 关龙新,顾祖飞,张超,王爱春,彭晨若,江会华,吴晓建. 考虑系统复杂扰动的智能车模型预测路径跟踪控制[J]. 汽车工程, 2022, 44(12): 1844-1855. |
| [13] | 王玮琛,李军求,孙逢春,宋健,吴永华. 基于Tube MPC的多轴重型车辆全轮转向路径跟踪策略[J]. 汽车工程, 2022, 44(11): 1665-1675. |
| [14] | 胡杰,钟鑫凯,陈瑞楠,朱令磊,徐文才,张敏超. 基于模糊LQR的智能汽车路径跟踪控制[J]. 汽车工程, 2022, 44(1): 17-25. |
| [15] | 夏祥腾,王大方,曹江,赵刚,张京明. 基于稀疏卷积神经网络的车载激光雷达点云语义分割方法[J]. 汽车工程, 2022, 44(1): 26-35. |
|
||