汽车工程 ›› 2025, Vol. 47 ›› Issue (11): 2202-2211.doi: 10.19562/j.chinasae.qcgc.2025.11.014
• • 上一篇
陈国迎1( ),董佳豪2,王鑫煜2,王佳琦2,卢磊3,李论3
),董佳豪2,王鑫煜2,王佳琦2,卢磊3,李论3
Guoying Chen1(),Jiahao Dong2,Xinyu Wang2,Jiaqi Wang2,Lei Lu3,Lun Li3
摘要:
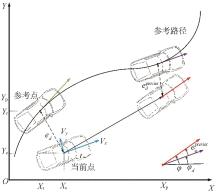
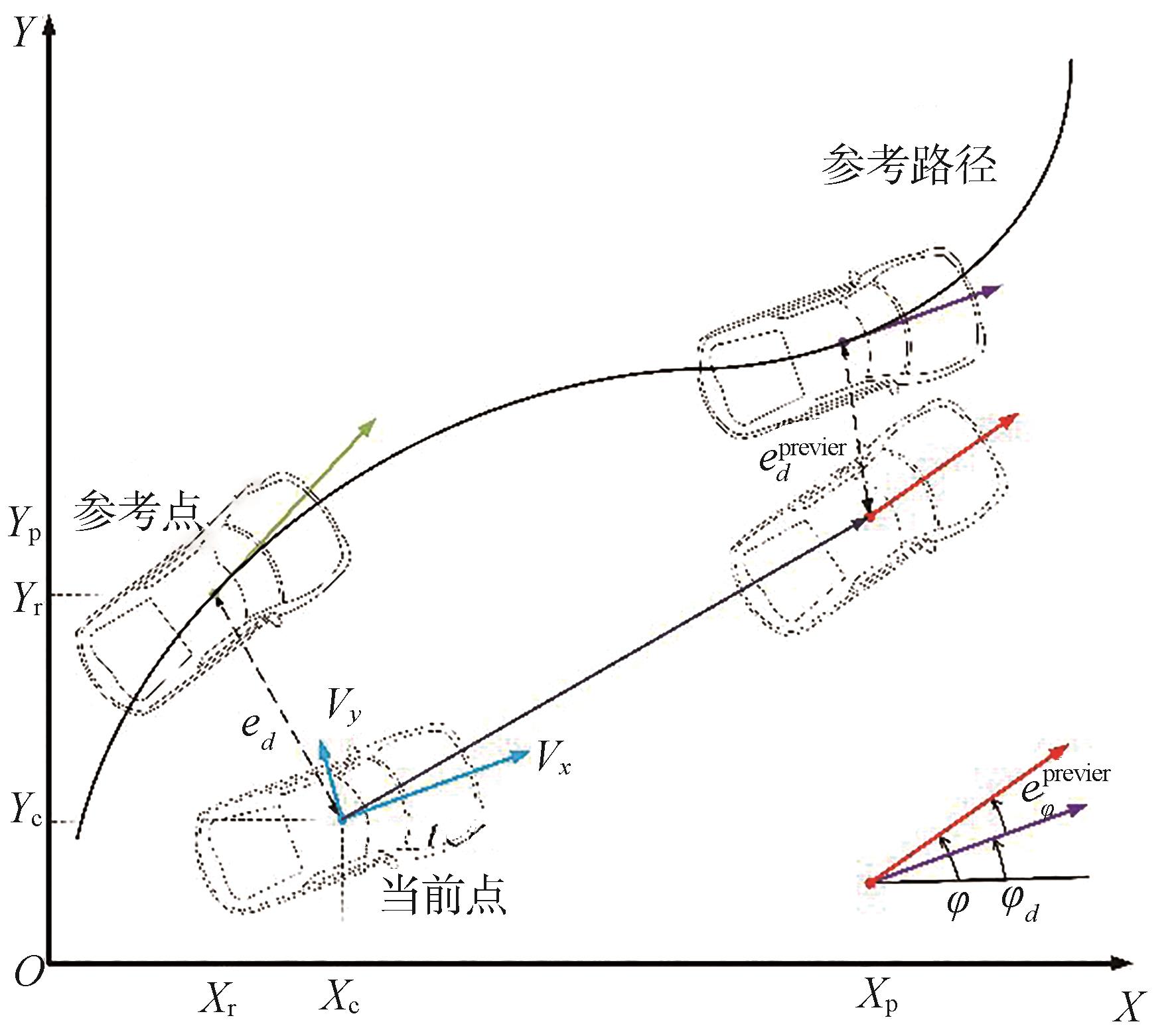
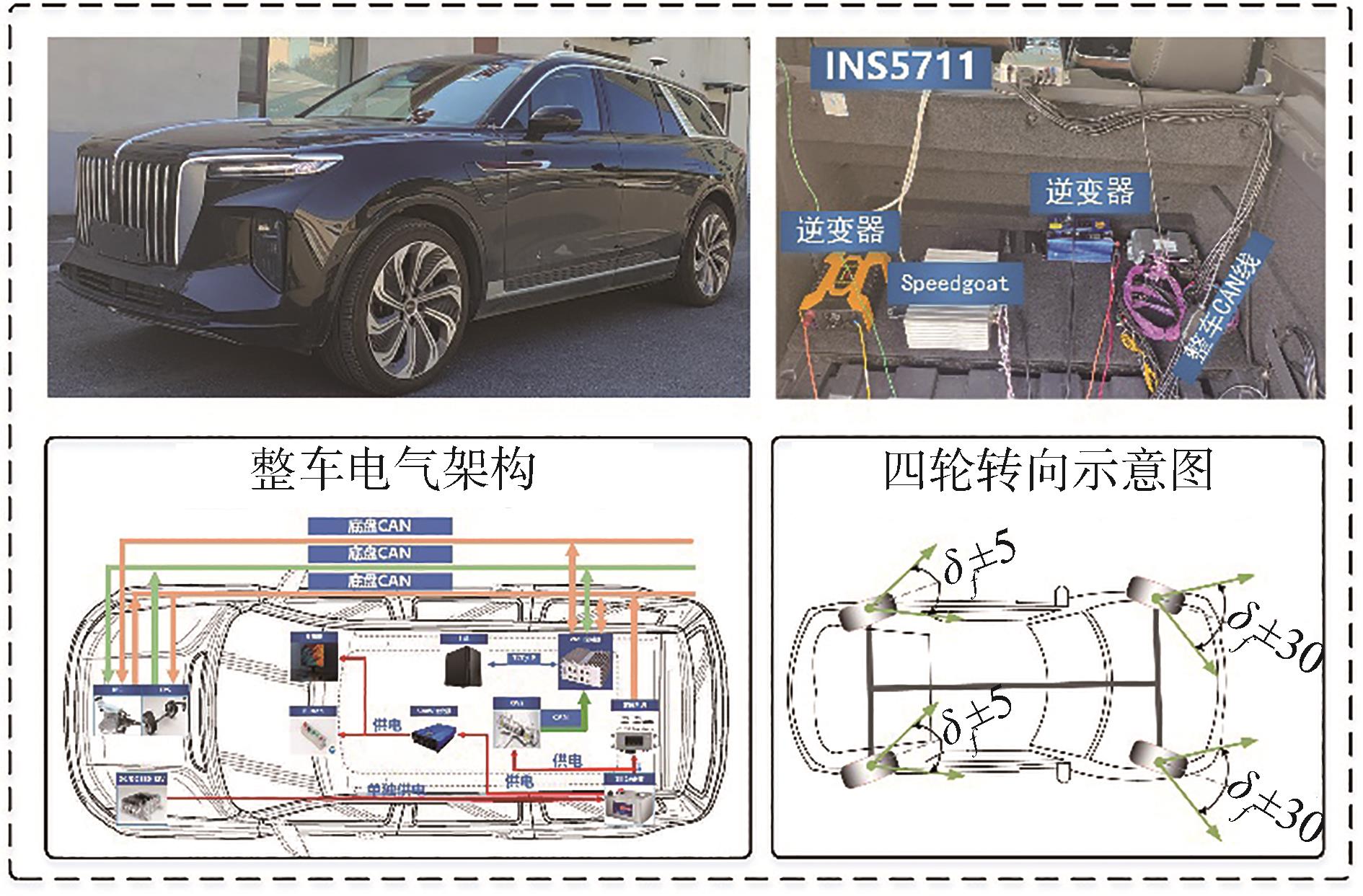
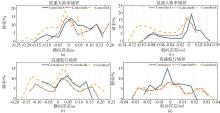
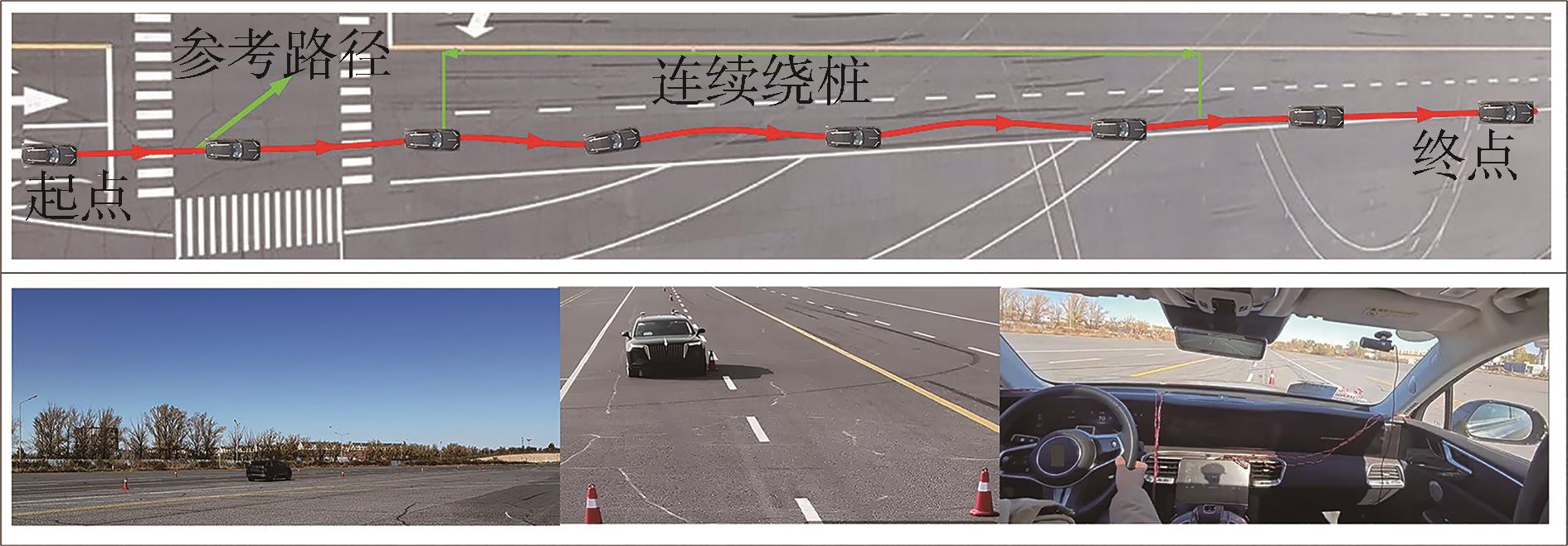
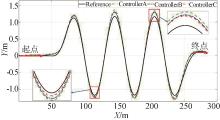
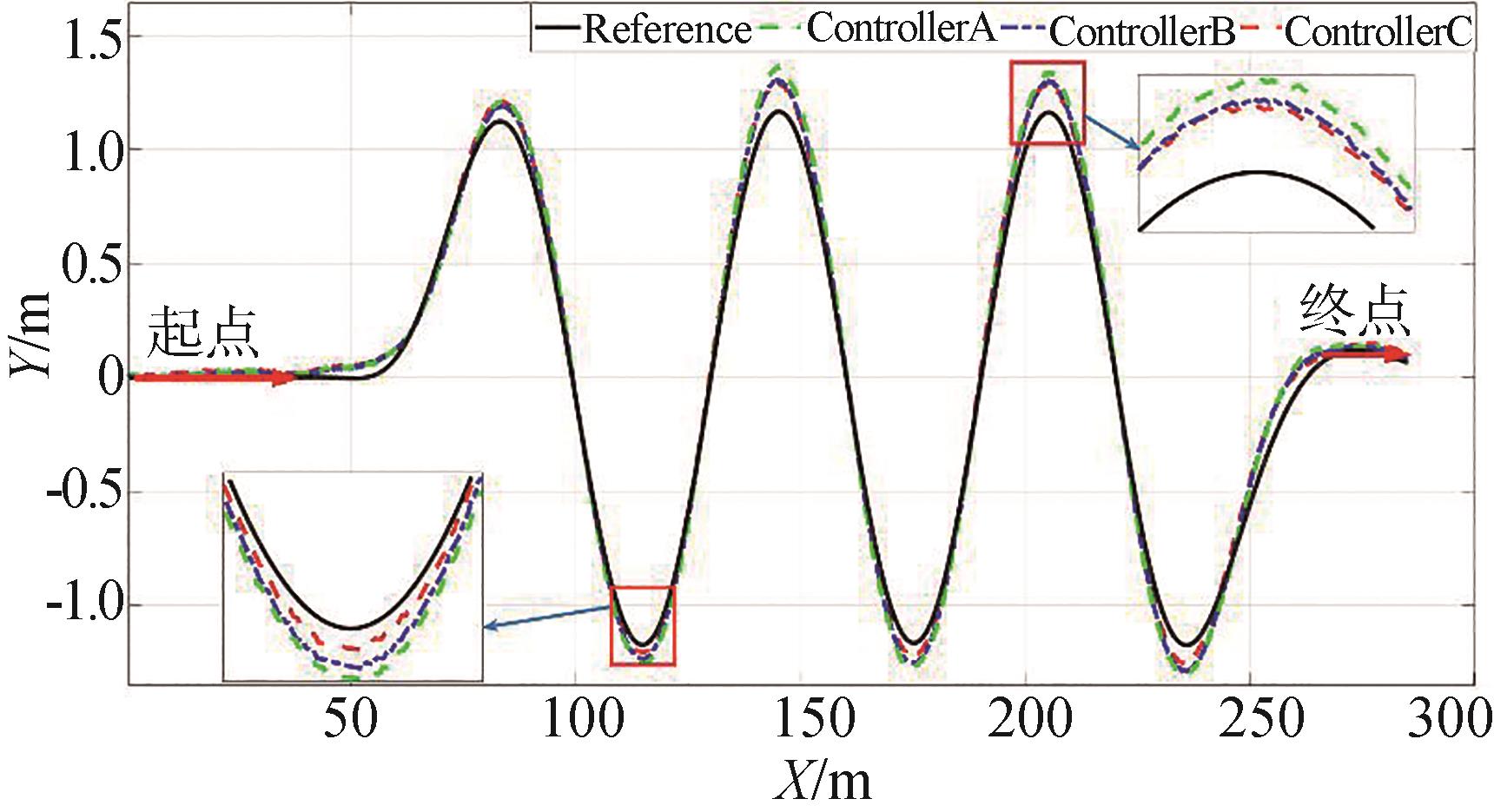
针对四轮转向车辆广泛采用的基于反馈机制的运动控制方法在极限侧偏场景下存在路径跟踪横向及航向误差无法收敛的问题,提出一种无偏前馈与迟滞修正全状态反馈相结合的控制方法。首先,设计考虑路径预瞄和迟滞修正的全状态反馈控制器,并基于此进行四轮转向车辆横向运动闭环分析,推导出稳态下横向和航向误差为零的无偏前馈转角,从而建立无偏前馈与迟滞修正全状态反馈相结合的控制算法。最后,对提出的控制算法进行实车试验,并与纯反馈控制算法和比例前馈加全状态反馈控制算法进行对比验证。结果表明,本文提出的控制算法在大曲率工况下最大横向误差分别降低26.6%和20.5%,最大航向误差分别降低21.9%和15.7%。在高速蛇行工况下,最大横向误差分别降低29.9%和15.6%,最大航向误差分别降低37.8%和32%。