汽车工程 ›› 2024, Vol. 46 ›› Issue (6): 1006-1014.doi: 10.19562/j.chinasae.qcgc.2024.06.007
张傲1,李淑艳1( ),高博麟2,万科科1,周光3,曹通易3
),高博麟2,万科科1,周光3,曹通易3
收稿日期:2024-01-10
修回日期:2024-02-24
出版日期:2024-06-25
发布日期:2024-06-19
通讯作者:
李淑艳
E-mail:lishuyan@cau.edu.cn
基金资助:
Ao Zhang1,Shuyan Li1(),Bolin Gao2,Keke Wan1,Guang Zhou3,Tongyi Cao3
Received:2024-01-10
Revised:2024-02-24
Online:2024-06-25
Published:2024-06-19
Contact:
Shuyan Li
E-mail:lishuyan@cau.edu.cn
摘要:
整车质量是车辆动力学参数中的一个关键状态量。在辅助驾驶系统中,整车质量的准确估计对规划控制算法至关重要。传统的质量估计算法在同时估计车辆质量与道路坡度时面临挑战,尤其是坡度估计的误差可能严重影响质量估计的准确性。当前,云控平台提供了高精度的道路地图信息,为进一步优化质量估计算法提供了全新的思路。本研究基于云控平台的车云协同框架,设计了云控系统下的商用车质量估计系统架构。进而基于扩展卡尔曼滤波理论,并结合云端的道路地图信息,开发了商用车质量估计算法。通过将道路坡度视为已知参数而非变化的状态量对整车质量进行估计,并利用实车试验采集到的行驶数据进行了算法对比验证。试验结果表明,基于云端坡度信息的质量估计算法,在空载与满载工况下均能实现快速收敛,估计质量的绝对百分比误差在3%以内,相较于传统的同步估计车辆质量与道路坡度的算法,能够更快且更准确地收敛到车辆真实质量附近。
张傲,李淑艳,高博麟,万科科,周光,曹通易. 基于云端地图的智能网联商用车质量估计算法研究[J]. 汽车工程, 2024, 46(6): 1006-1014.
Ao Zhang,Shuyan Li,Bolin Gao,Keke Wan,Guang Zhou,Tongyi Cao. Research on Mass Estimation Algorithm of Intelligent and Connected Commercial Vehicle Based on Cloud Road Map[J]. Automotive Engineering, 2024, 46(6): 1006-1014.

图1
云控系统下的智能网联商用车质量估计算法架构"

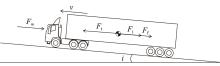
图2
车辆纵向受力示意图"


图4
云端质量估计算法流程"
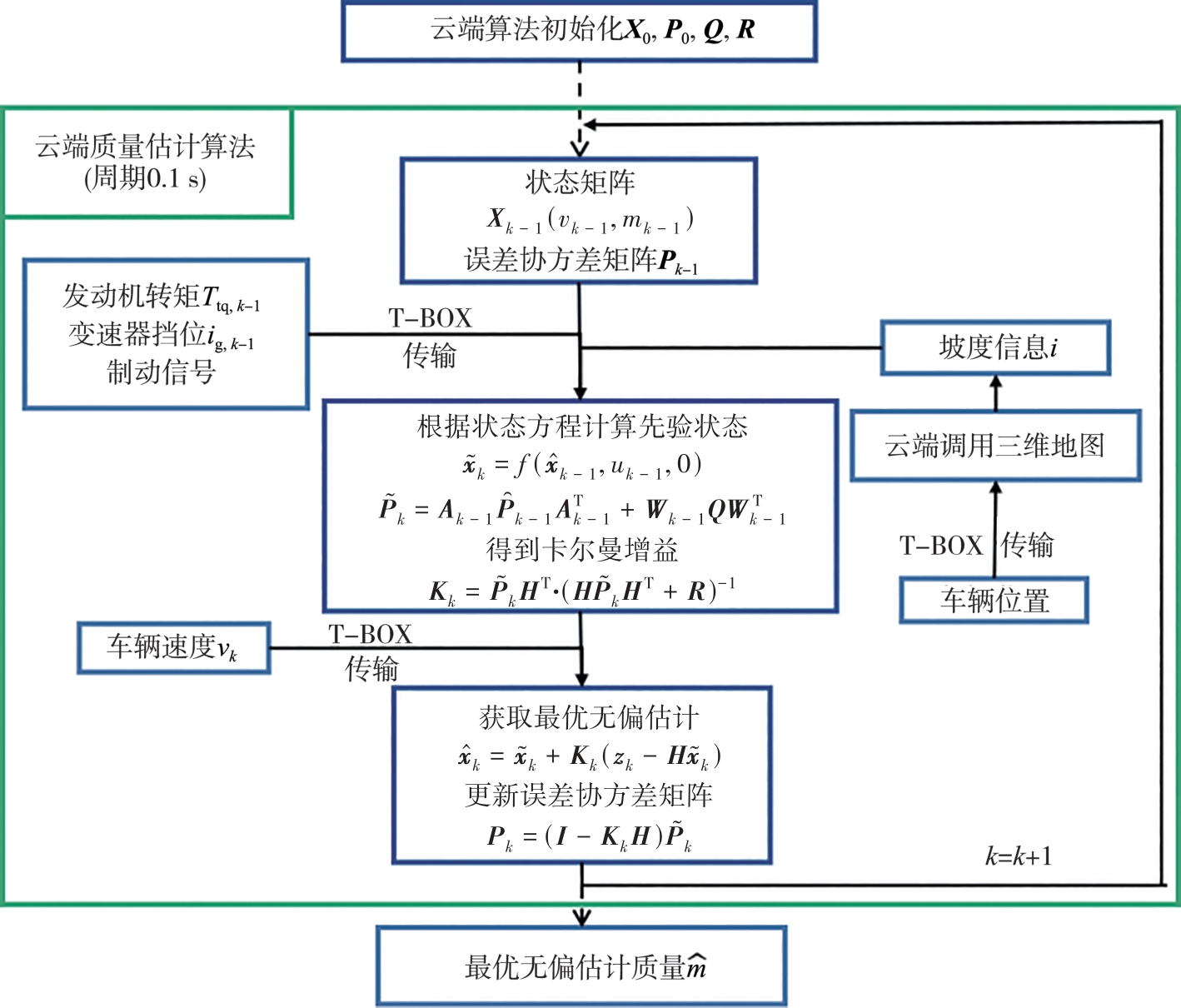

图5
试验车辆"

表1
试验关键参数"
| 参数 | 数值 |
|---|---|
| 车辆质量m/kg | 49 000(满载) |
| 16 800(空载) | |
| 主减速器传动比 | 3.7 |
| 变速器传动比 | 0.78(最高挡) |
| 轮胎半径 | 0.502 |
| 迎风面积A/m2 | 9.78 |
| 风阻系数 | 0.67 |
| 重力加速度g/(m·s-2) | 9.81 |
| 传动系机械效率 | 0.811 9 |
| 滚动阻力系数f | 0.006 |
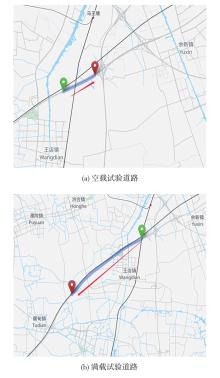
图6
试验道路"

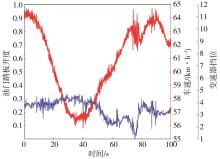
图7
空载行驶试验数据"
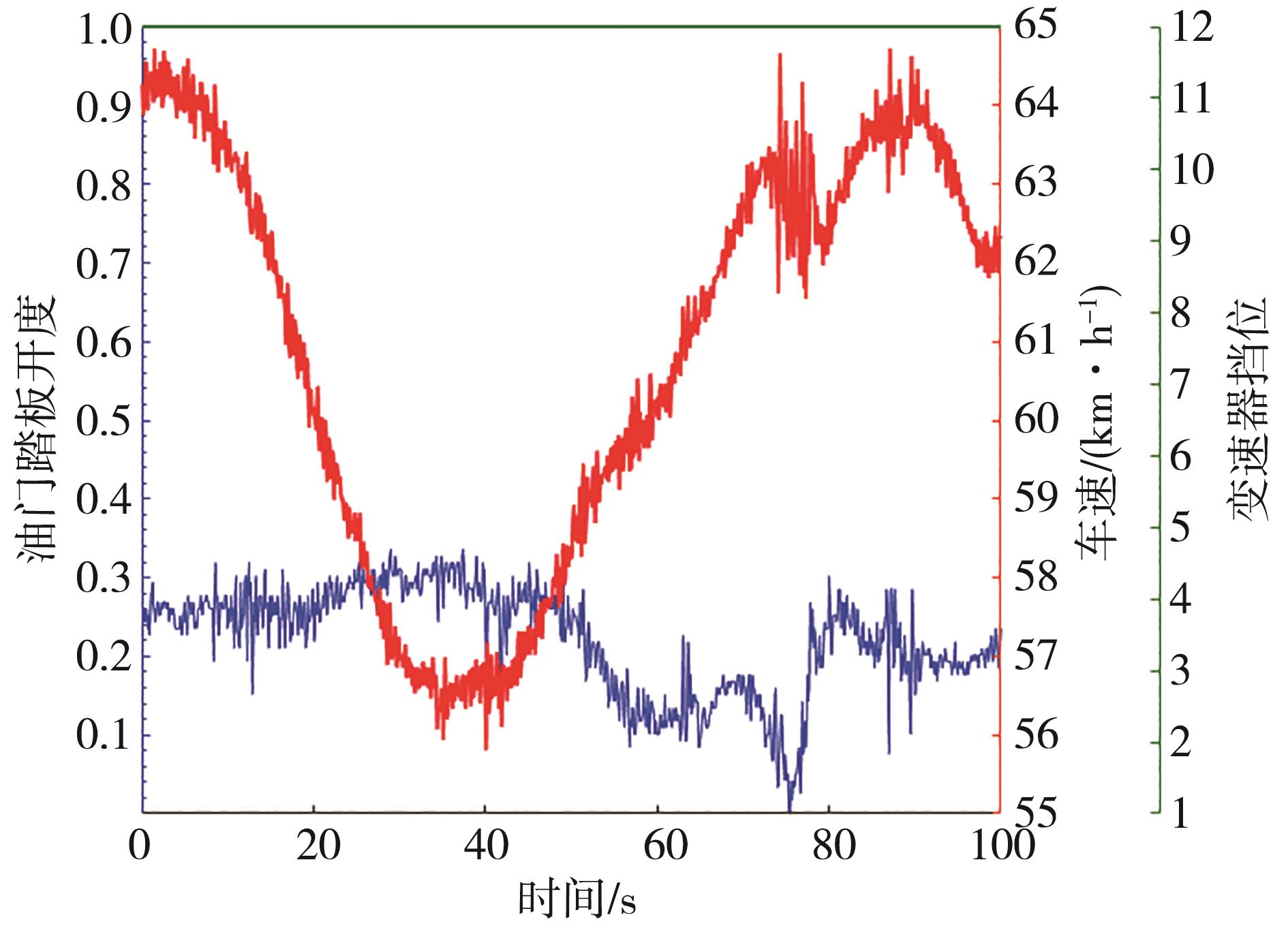
图8
空载质量估计结果"
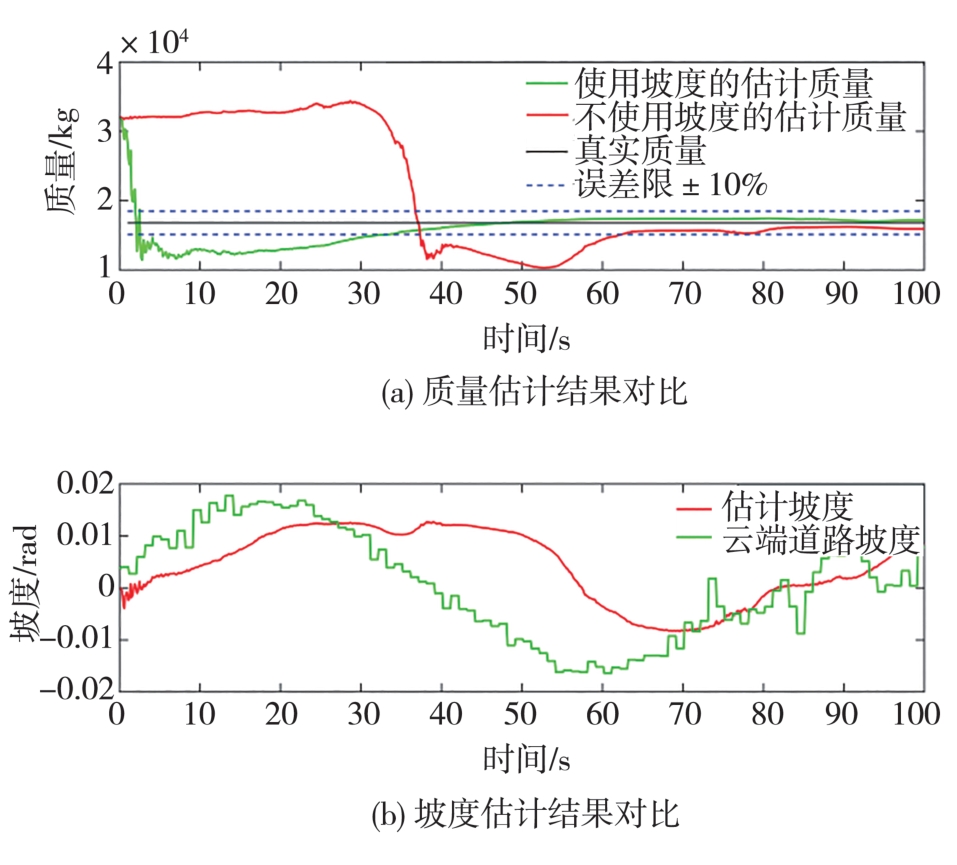
表2
空载质量估计误差对比"
| 质量估计算法类型 | 估计质量APE/% | 估计质量RMSE/kg |
|---|---|---|
| 不使用云端道路坡度信息 | 5.21 | 9 742 |
| 使用云端道路坡度信息 | 2.07 | 2 580 |
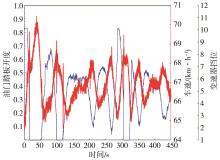
图9
满载行驶试验数据"
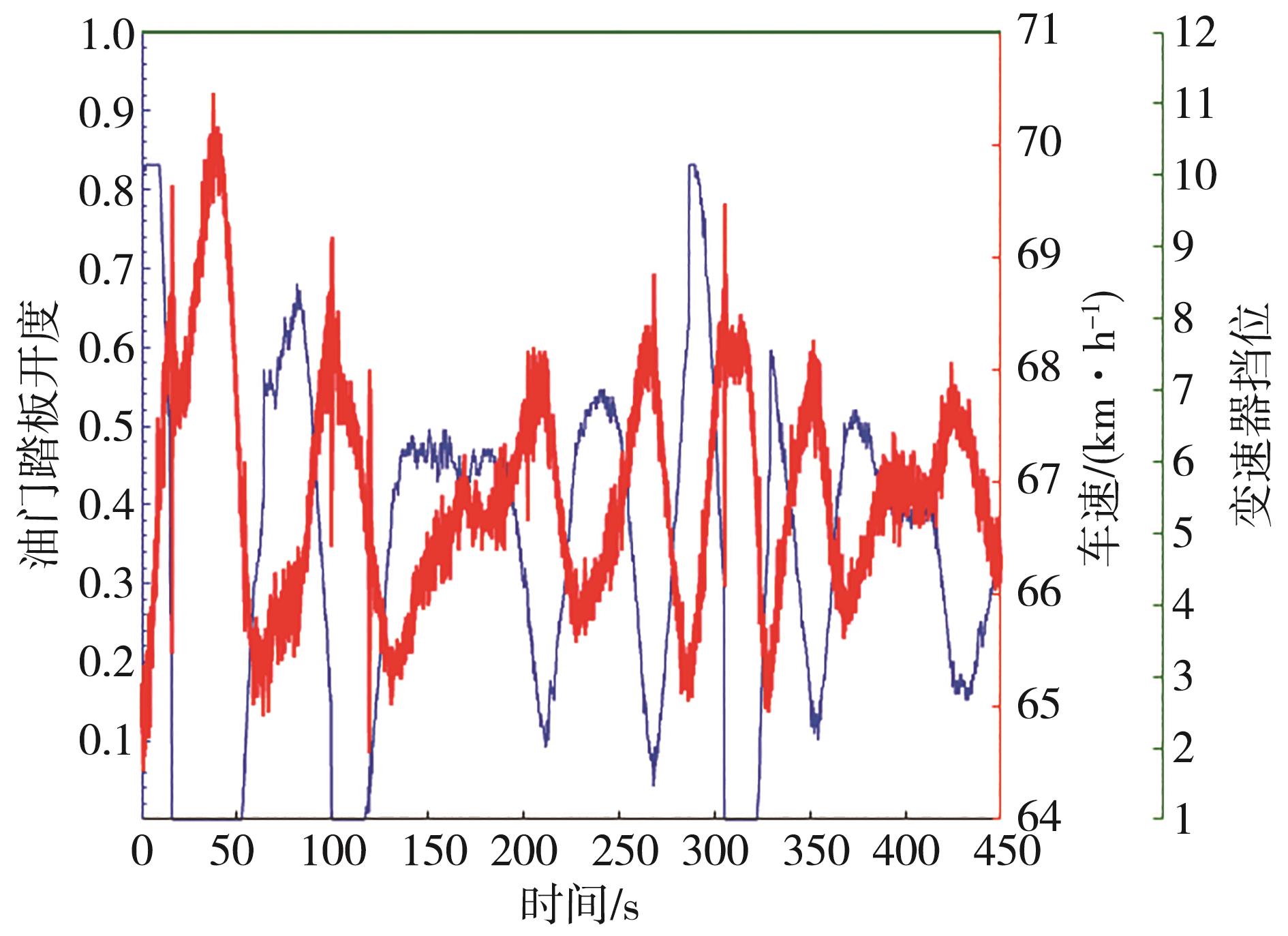
图10
满载质量估计结果"
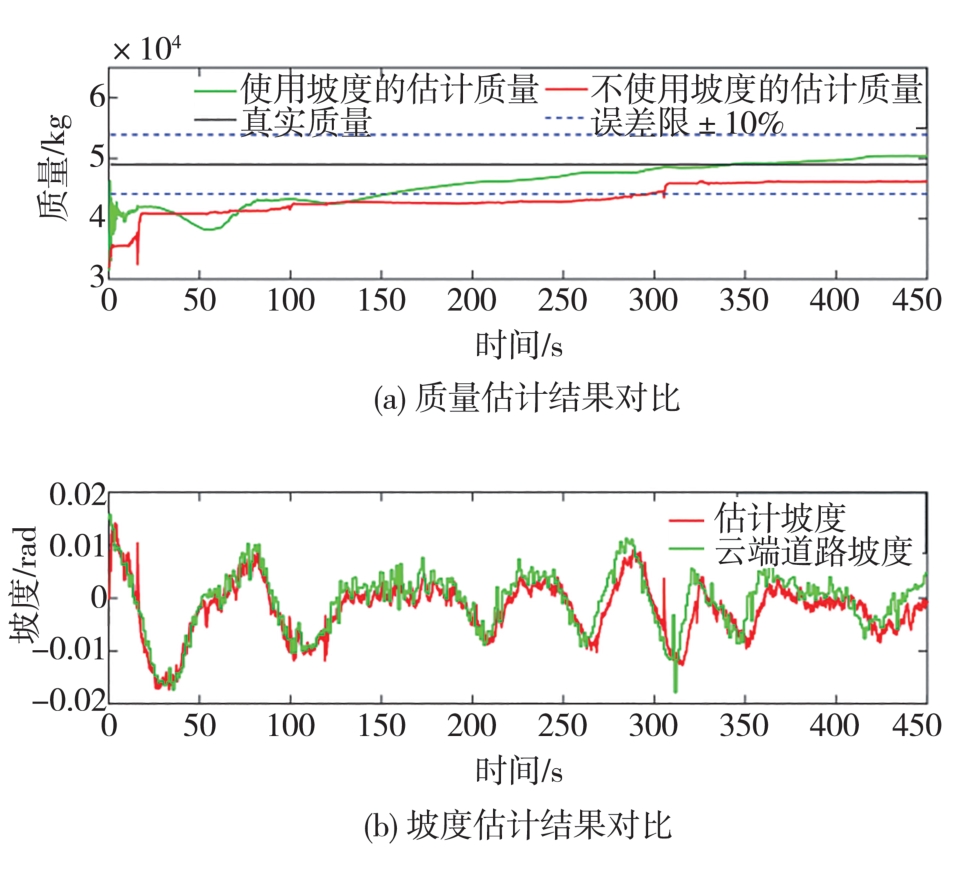
表3
满载质量估计误差对比"
| 质量估计算法类型 | 估计质量APE/% | 估计质量RMSE/kg |
|---|---|---|
| 不使用云端道路坡度信息 | 5.80 | 6 184 |
| 使用云端道路坡度信息 | 2.78 | 4 671 |
表4
质量误差对油耗影响"
| 设置质量/kg | 油耗/kg | 油耗增加率/% |
|---|---|---|
| 49 000(真实质量) | 2.255 | |
| 46 550(95%质量) | 2.263 | 0.35 |
| 51 450(105%质量) | 2.274 | 0.84 |
| 44 100(90%质量) | 2.270 | 0.66 |
| 53 900(110%质量) | 2.266 | 0.48 |
| 39 200(80%质量) | 2.288 | 1.46 |
| 58 800(120%质量) | 2.284 | 1.28 |
| 32 900(半载质量) | 2.551 | 13.12 |
| 16 800(空载质量) | 2.606 | 15.56 |
| 1 | HOLM E J. Vehicle mass and road grade estimation using Kalman filter[J]. Inst. Syst. Dep. Electr. Eng, 2011, 16: 1-38. |
| 2 | 李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12): 1595-1605. |
| LI K Q, CHANG X Y, LI J W, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020, 42(12): 1595-1605. | |
| 3 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI K Q, DAI Y F, LI S B, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Automotive Safety and Energy, 2017, 8(1): 1-14. | |
| 4 | LI S, LI R, GAO B, et al. Predictive adaptive cruise control for heavy-duty vehicle based on cloud control system[C]. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022: 2998-3003. |
| 5 | LI S, WAN K, GAO B, et al. Predictive cruise control for heavy trucks based on slope information under cloud control system[J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 812-826. |
| 6 | 韩春阳, 宿旸, 裴欣, 等. 基于深度学习的货车载重实时估计方法研究[J]. 中国公路学报, 2022, 35(3): 295-306. |
| HAN C Y, SU Y, PEI X, et al. Real-time weight estimation for trucks based on deep learning method[J]. China Journal of Highway and Transport, 2022, 35(3): 295-306. | |
| 7 | TORABI S, WAHDE M, HARTONO P. Road grade and vehicle mass estimation for heavy-duty vehicles using feedforward neural networks[C]. 2019 4th International Conference on Intelligent Transportation Engineering (ICITE), 2019: 316-321. |
| 8 | LI B, ZHANG J, DU H, et al. Two-layer structure based adaptive estimation for vehicle mass and road slope under longitudinal motion[J]. Measurement, 2017, 95: 439-455. |
| 9 | 张兴. 商用车总质量及行驶道路坡度实时估计[D]. 重庆:重庆理工大学, 2022. |
| ZHANG X. Vehicle mass and road slope real-time estimation of commercial[D]. Chongqing: Chongqing University of Technology, 2022. | |
| 10 | WINSTEAD V, KOLMANOVSKY I V. Estimation of road grade and vehicle mass via model predictive control[C]. Proceedings of 2005 IEEE Conference on Control Applications, 2005. CCA 2005. 2005: 1588-1593. |
| 11 | 戴卓, 吴光强. 基于车辆动力学的道路坡度与整车质量估计[J]. 汽车技术, 2018(1): 20-24. |
| DAI Z, WU G Q. Estimation method of road slope and vehicle mass based on vehicle dynamics[J]. Automobile Technology, 2018(1): 20-24. | |
| 12 | MCINTYRE M L, GHOTIKAR T J, VAHIDI A, et al. A two-stage lyapunov-based estimator for estimation of vehicle mass and road grade[J]. IEEE Transactions on Vehicular Technology, 2009, 58(7): 3177-3185. |
| 13 | 李远方. 重型车质量辨识及道路坡度状态估计方法研究[D]. 长春: 吉林大学, 2012. |
| LI Y F. Research on the ldentification of mass for heavy vehicle and the estimation of road gradient[D]. Changchun: Jilin University, 2012. | |
| 14 | KIM S, SHIN K, YOO C, et al. Development of algorithms for commercial vehicle mass and road grade estimation[J]. International Journal of Automotive Technology, 2017, 18(6): 1077-1083. |
| 15 | 苏亮, 冷搏, 金达. 基于转矩矢量控制分布式电驱动客车操纵性改善方法[J]. 同济大学学报(自然科学版), 2020, 48(11): 1629-1637. |
| SU L, LENG B, JIN D. Handling improvement for distributed drive electric bus based on torque vectoring control method[J]. Journal of Tongji University (Natural Science edition), 2020, 48(11):1629-1637. | |
| 16 | FATHY H K, KANG D, STEIN J L. Online vehicle mass estimation using recursive least squares and supervisory data extraction[C]. 2008 American Control Conference, 2008: 1842-1848. |
| 17 | 郝胜强, 罗培培, 席军强. 基于稳态卡尔曼滤波的车辆质量与道路坡度估计[J]. 汽车工程, 2018, 40(9): 1062-1067,1075.HAO S Q, LUO P P, XI J Q. Estimation of vehicle mass and road slope based on steady-state Kalman filter[J]. Automotive Engineering, 2018, 40(9): 1062-1067,1075. |
| 18 | 曹学自, 李军伟, 姜世腾, 等. 基于预见性巡航的重型卡车质量估计系统设计[J]. 科学技术与工程, 2020, 20(32): 13439-13446. |
| CAN X Z, LI J W, JIANG S T, et al. Design of the mass estimation system for heavy truck based on predictive cruise[J]. Science Technology and Engineering, 2020, 20(32):13439-13446. | |
| 19 | ZHONG S, ZHAO Y, GE L, et al. Vehicle state and bias estimation based on unscented Kalman filter with vehicle hybrid kinematics and dynamics models[J]. Automotive Innovation, 2023, 6(4): 571-585. |
| 20 | 褚文博, 罗禹贡, 罗剑, 等. 电驱动车辆的整车质量与路面坡度估计[J]. 清华大学学报(自然科学版), 2014, 54(6): 724-728. |
| CHU W B, LUO Y G, LUO J, et al. Vehicle mass and road slope estimates for electric vehicles[J]. Journal of Tsinghua University(Science and Technology), 2014, 54(6): 724-728. | |
| 21 | SUN S, ZHANG N, WALKER P, et al. Intelligent estimation for electric vehicle mass with unknown uncertainties based on particle filter[J]. IET Intelligent Transport Systems, 2020, 14(5): 463-467. |
| 22 | LINGMAN P, SCHMIDTBAUER B. Road slope and vehicle mass estimation using Kalman filtering[J]. Vehicle System Dynamics, 2002, 37(S1): 12-23. |
| 23 | BISHOP G, WELCH G. An introduction to the Kalman filter[J]. Proc of SIGGRAPH, Course, 2001, 8(27599-23175): 41. |
| 24 | 杨凡. 基于OpenXC数据的汽车质量和道路坡度联合估计方法研究[D]. 重庆: 重庆大学, 2018. |
| YANG F. Study on the joint dynamic estimation algorithm of vehicle mass and road slope using OpenXC data[D]. Chongqing: Chongqing University, 2018. | |
| 25 | SCHNEIDER R, GEORGAKIS C. How to not make the extended Kalman filter fail[J]. Industrial & Engineering Chemistry Research, 2013, 52(9): 3354-3362. |
| 26 | 孙恩鑫, 殷玉明, 辛喆, 等. 微小加速度下汽车质量-道路坡度自适应估计[J]. 清华大学学报(自然科学版), 2022, 62(1): 125-132. |
| SUN E X, YIN Y M, XIN Z, et al. Adaptive joint estimates of vehicle mass and road grades for small acceleration driving scenarios[J]. Journal of Tsinghua University(Science and Technology), 2022, 62(1): 125-132. |
| [1] | 周俊宇,李克强,任晗啸,于杰,罗禹贡. 基于场景划分的智能网联汽车协同换道避障方法[J]. 汽车工程, 2024, 46(5): 745-753. |
| [2] | 严运兵,岳铭浩,李海玮. 基于扩展卡尔曼滤波与机器视觉融合的道路侧向坡度估计[J]. 汽车工程, 2024, 46(4): 605-616. |
| [3] | 胡林,谷子逸,王丹琦,王方,邹铁方,黄晶. 汽车安全性测评规程现状及趋势展望[J]. 汽车工程, 2024, 46(2): 187-200. |
| [4] | 关书睿,李克强,周俊宇,石佳,孔伟伟,罗禹贡. 面向强制换道场景的智能网联汽车协同换道策略[J]. 汽车工程, 2024, 46(2): 201-210. |
| [5] | 王庞伟,刘程,汪云峰,张名芳. 面向城市道路的智能网联汽车多车道轨迹优化方法[J]. 汽车工程, 2024, 46(2): 241-252. |
| [6] | 张念忠,宋强,王冠峰,王明生. 车用永磁同步电机无电流传感器控制研究[J]. 汽车工程, 2024, 46(2): 281-289. |
| [7] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [8] | 李升波,占国建,蒋宇轩,兰志前,张宇航,邹文俊,陈晨,成波,李克强. 类脑学习型自动驾驶决控系统的关键技术[J]. 汽车工程, 2023, 45(9): 1499-1515. |
| [9] | 刘济铮,王震坡,孙逢春,张雷. 异构智能网联汽车编队延迟补偿控制研究[J]. 汽车工程, 2023, 45(9): 1573-1582. |
| [10] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [11] | 胡明辉,朱广曜,刘长贺,唐国峰. 考虑迟滞特性的卡尔曼滤波和门控循环单元神经网络的锂离子电池SOC联合估计[J]. 汽车工程, 2023, 45(9): 1688-1701. |
| [12] | 梅润,褚端峰,高博麟,李克强,丛炜,陈超义. 基于云控系统的队列预测性巡航与换道决策[J]. 汽车工程, 2023, 45(8): 1299-1308. |
| [13] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [14] | 朱冰,姜泓屹,赵健,韩嘉懿,刘彦辰. 智能网联汽车协同感知信任度动态计算与评价方法[J]. 汽车工程, 2023, 45(8): 1383-1391. |
| [15] | 关宇昕,冀浩杰,崔哲,李贺,陈丽文. 智能网联汽车车载CAN网络入侵检测方法综述[J]. 汽车工程, 2023, 45(6): 922-935. |
|